Hi zusammen, irgendwie kann ich mir kein klares Bild davon machen und finde keine klaren Aussagen dazu, aber wie wird das Verhältnis von einer einfachen, eingängigen Schnecke aufs Zahnrad kalkuliert? Wenn ein Zahnrad ein anderes antreibt, dass nur den halben Durchmesser des antreibenden hat, dann hat man ein Verhältnis von 1:2, das ist ja soweit leicht zu verstehen, aber wie ist es bei Schneckengetrieben, was nimmt man bei der Schnecke als Maß? Der Durchmesser der Schnecke, wenn ich mir das physisch vorstelle, dürfte ja keine Rolle spielen, auch die Länge nur bis zu einem bestimmten Maß, wenn überhaupt, weil es ja das Zahnrad immer gleich weit bewegt, egal wieviele Zähne die Schnecke berührt. Hoffe mein Anliegen ist verständlich und ihr könnt mich vom guten alten durchgetretenen Schlauch holen ;-) Mit freundlichen Grüßen Bastler
Eine eingängige Schnecke (das ist der Standard) schiebt das Schneckenrad pro Umdrehung der Schnecke um einen Zahn weiter. Hilft dir das? MfG, Arno
Bastler schrieb: > was nimmt man bei der Schnecke als Maß? Eine eingängige Schnecke dreht bei jeder Umdrehung das angetriebene Zahnrad um 1 Zahn weiter, ein 36-zähniges also um 10 Grad, die Übersetzung ist 36:1.
Aaahh, ok, also ist die Schnecke immer Eins und die Zähne des Zahnrads sind die Zahl nachm Doppelpunkt. Michael ergänzt Arno, supi, Danke euch. Manchmal wirken die Dinge einfach zu einfach, hihi :) Vielen Dank!
Hallo neben der Tatsache das ein Schneckenantrieb nur in eine Richtung funktioniert, was ja allgemein bekannt ist, sollte man auch Bedenken das der Schneckenantrieb recht viel Leistung wegnimmt und oft auch "viel" Spiel hat - sogar haben muss. Der besonders bei schnell drehenden kleinen DC Motoren (Leistung <10W) beliebte Schnecke, um auf brauchbare Drehzahlen und Moment zu kommen, ist leider nicht die auf den ersten Blick optimale Lösung. Aber eben schön klein, kompakt und preiswert im Vergleich zu mehrstufigen Getrieben und sehr einfach auf zu bauen. Schneckenscheuche
Bastler schrieb: > Wenn ein Zahnrad ein > anderes antreibt, dass nur den halben Durchmesser des antreibenden hat, > dann hat man ein Verhältnis von 1:2 Dieser Satz stimmt, wenn man das Wort Durchmesser durch Zähnezahl ersetzt. Durch Profilverschiebung lassen sich nämlich durchaus Zahnräder mit unterschiedlichen Durchmessern bei gleicher Zähnezahl herstellen.
Achtung! Bei zweigängigen Schnecken dreht sich das Zahnrad um 2 Zähne weiter, wenn sich die Schnecke 1 mal 360° gedreht hat. Schneckenantriebe funktionieren in beiden Drehrichtungen (Linkslauf und Rechtslauf). Jedoch lässt sich Das Drehmoment nicht vom Zahnrad auf die Schnecke übertragen (selbsthemmend).
Schneckenscheuche schrieb: > neben der Tatsache das ein Schneckenantrieb nur in eine Richtung > funktioniert, was ja allgemein bekannt ist Du meinst, ebenso bekannt wie: "Daß in Area51 die toten Aliens aufbewahrt werden" ? Auch du kannst noch lernen, selbst aus https://de.wikipedia.org/wiki/Schneckengetriebe , daß es selbsthemmende Schneckengetriebe gibt und solche die nicht hemmen, also also "rückwärts" laufen, insbesondere wenn sie nicht nur 1-gängig von 2 oder 3-gängig sind. Beispiel für die Übersetzung ins Schnelle stehen dort.
ohne den wiki artikel gelesen zu haben, vermute ich das es mit der steigung der schnecke zu tun hat ob das zahnrad die schnecke drehen kann oder nicht. aber effizient wird das wohl nicht sein wegen der reibung.
c.m. schrieb: > ohne den wiki artikel gelesen zu haben, vermute ich das es mit der > steigung der schnecke zu tun hat ob das zahnrad die schnecke drehen kann > oder nicht. > > aber effizient wird das wohl nicht sein wegen der reibung. nein ... es hat nichts mit der Steigung der Schnecke zu tun (die muss nur zum Modul des Zahnrades passen) sondern - wie weiter oben schon gesagt wurde - mit der Gangzahl der Schnecke.
doedel schrieb: > c.m. schrieb: >> ohne den wiki artikel gelesen zu haben, vermute ich das es mit der >> steigung der schnecke zu tun hat ob das zahnrad die schnecke drehen kann >> oder nicht. >> >> aber effizient wird das wohl nicht sein wegen der reibung. > > nein ... es hat nichts mit der Steigung der Schnecke zu tun (die muss > nur zum Modul des Zahnrades passen) sondern - wie weiter oben schon > gesagt wurde - mit der Gangzahl der Schnecke. Aber sicher hat es (wie auch bei Schrauben) zum größten Teil mit dem Steigungswinkel zu tun. Ob ich jetzt eine dünne eingängige oder eine dicke mehrgängige Schnecke habe spielt dabei eine untergeordnete Rolle.
Nein, das spielt keine Rolle. Die Steigung der Schnecke muss wie gesagt zum Modul des Zahnrades passen. Wenn die Steigung zum Beispiel deutlich zu groß ist, können die Zahnräder überhaupt nicht mehr in die Schnecke greifen. Folglich kann man die Steigung der Schnecke nicht beliebig wählen, sondern sie muss zum Modul passen. Ob das Zahnrad dann bei einer Umdrehung der Schnecke um 1, 2, 3 oder x Zähne weitergedreht wird, hängt tatsächlich einzig und allein von der Gangzahl der Schnecke ab und von nichts anderem. Mechanischen "Laien" fällt es oft schwer, sich überhaupt mehrgängige Gewinde vorzustellen. Deshalb glaub einem Industriemechaniker: es ist so!
doedel schrieb: > nein ... es hat nichts mit der Steigung der Schnecke zu tun Doch. (Du hättest Wikipedia lesen sollen bevor du rumrätst).
dann empfehle ich Dir selbst nochmal die Lektüre von Wikipedia. Zitat: "Das Übersetzungsverhältnis berechnet sich als Quotient der Zähnezahl z2 des Schneckenrades durch die Gangzahl z1 der Schnecke. Bei Antrieb von der Schnecke erfolgt eine Drehzahlwandlung ins Langsame, bei Antrieb vom Rad hingegen erfolgt eine Erhöhung der Drehzahl (nur möglich bei nichtselbsthemmenden Paarungen)." wichtigste Passage: "Gangzahl z1 der Schnecke" und eben nicht Steigung. Wenn man den Rest des Artikel liest, merkt man auch, dass die Steigung mit dem Modul des Zahnrades zusammenhängt und sonst mit nichts. Also erstmal selber verstehen, bevor Du große Töne spuckst!
doedel schrieb: > wichtigste Passage: "Gangzahl z1 der Schnecke" und eben nicht Steigung. > Wenn man den Rest des Artikel liest, merkt man auch, dass die Steigung > mit dem Modul des Zahnrades zusammenhängt und sonst mit nichts. Also > erstmal selber verstehen, bevor Du große Töne spuckst! Au weia. Du bist wahrhaftig ein doedel. Die wichtige Passage im Wikipedia hast du glatt übersehen: "Selbsthemmung tritt bei ... einem Steigungswinkel der Schnecke ɣ < 5° auf" (bei > 5 Grad also zunehmend nicht). Wie der Steigungswinkel nun erreicht wird, ob durch hohe Gangzahl, geringe Übersetzung oder kleinen Durchmesser der Schnecke, ist egal. Es geht also keineswegs nur durch Mehrgängigkeit.
doedel schrieb: > Ob das Zahnrad dann bei einer > Umdrehung der Schnecke um 1, 2, 3 oder x Zähne weitergedreht wird, hängt > tatsächlich einzig und allein von der Gangzahl der Schnecke ab und von > nichts anderem. Ist korrekt Michael B. schrieb: > "Selbsthemmung tritt bei ... einem Steigungswinkel der Schnecke ɣ < 5° > auf" > (bei > 5 Grad also zunehmend nicht). > > Wie der Steigungswinkel nun erreicht wird, ob durch hohe Gangzahl, > geringe Übersetzung oder kleinen Durchmesser der Schnecke, ist egal. Stimmt auch. Irgendwie redet ihr meiner Meinung nach aneinander vorbei.
Gott ... so wenig mechanisches Verständnis??? Zitat "Generell ist die Schnecke eine Sonderform eines schrägverzahnten Zahnrades. Der Winkel der Schrägverzahnung ist so groß, dass ein Zahn sich mehrfach schraubenförmig um die Radachse windet. Der Zahn wird in diesem Fall als Gang bezeichnet" Gehen wir mal von einer zweigängigen Schnecke aus. Da die Schnecke zu den schrägverzahnten Zahnrädern gehört, gilt für sie auch zum Thema Modul das gleiche wie für schrägverzahnte Zahnräder sonst auch. Damit legt das Modul fest, wie weit ein Zahn vom nächsten entfernt ist. Korrekt? Dadurch ergibt sich automatisch, dass das Modul auch bei der Schnecke die Abstände der Flanken der einzelnen Gänge definiert. Und zusammen mit dem Durchmesser der Schnecke ergibt sich daraus zwingend die Steigung. Diese Steigung lässt sich selbst nicht direkt beeinflussen sondern nur über eine Veränderung des Durchmessers der Schnecke, da das Modul in dem Fall gleichbleiben muss. Daraus ergibt sich wiederrum, dass es bei gegebenem Durchmesser der Schnecke nur genau eine zulässige Steigung geben kann. Also ja: man kann die Steigung beeinflussen und damit auch die Frage, ob ein Schneckentrieb selbsthemmend ist oder nicht ... aber nur über den Durchmesser der Schnecke! Auf die Frage des Untersetzungsverhältnisses hat die Steigung aber nach wie vor keinen Einfluss. Ein Blick in eine beliebige mechanische Formelsammlung wird Dir das übrigens auch bestätigen.
ja Steigung ergibt sich aber durch Modul (Grob gesagt abstand der Zähne) und Gangzahl und Durchmesser (nicht länge) der Schnecke. Aber der Winkel gibt dir an wie die Kraft Aufteilung zwischen Axial (Kraft die die Schnecke wegschiebt) und radial (die Kraft die die Schnecke dreht) sich aufteilt. Das alles kann man sich vorstellen wenn man mal die Schnecke Abrollt. Dann sieht man, dass bei einer eingängigen Gewinde sich zu einer Geraden darstellt. (nimm Excel und mach dir ein graf von h (y achse) und phi (drehwinkel) (als X-Achse) Wenn du dir mehrere Gänge aufzeichnen willst dann beachte bei Phi=0 dass de Unterschiedlich starten. MfG myasuro
und nein, die Steigung ist nicht abhängig von der Gangzahl!
Da habt ihr lange hin und her geredet, bis klar wurde, dass der eine von der Übersetzung (hängt nicht von der Steigung ab) und der andere von der Selbsthemmung (hängt von der Steigung ab) spricht, und jetzt gehts mit den Details weiter... doedel schrieb: > und nein, die Steigung ist nicht abhängig von der Gangzahl! Bei gleichem Modul und gleichem Schneckendurchmesser ist eine zweigängige Schnecke ungefähr (Sinus und Tangens sind für kleine Winkel ja fast linear) doppelt so steil sein wie eine eingängige. Stell dir eine Linie parallel zur Schneckenachse auf den Zahnflanken vor - der erste Gang wird diese Linie erst nach 2x Modul wieder erreichen, damit der zweite Gang noch dazwischenpasst. MfG, Arno
herje ... nimmt das denn gar kein Ende???? Nein, die Gangzahl hat nichts mit der Steigung zu tun. Bleiben wir bei unserer zweigängigen Schnecke. Können wir uns darauf verständigen, dass das von mir oben gesagte korrekt ist und das Modul den Abstand von einem Zahn zum anderen auch beim Schrägzahnrad und damit auch bei der Schnecke definiert? Das heißt also auch, dass ich bei dieser zweigängigen Schnecke einfach einen Gang wegnehmen kann ohne dass sich am zweiten Gang etwas verändert. Richtig? Alleine schon daran sieht man, dass die Steigung damit nichts zu tun hat. Aber machen wir es noch konkreter an einem einfachen Beispiel: Ich habe eine eingängige Schraube mit einer Steigung von 1. Drehe ich diese Schraube nun eine Umdrehung in ein Gewinde, dann habe ich sie eine Längeneinheit "hineingeschraubt". Nun lege ich einen zweiten Gewindegang 180 Grad versetzt um die Schraube und habe somit nun ein zweigängiges Exemplar. Das gleiche mache ich natürlich im Gegengewinde. Jetzt drehe ich die Schraube wieder eine Umdrehung ... um wie viele Längeneinheiten wird sie sich bewegen? Korrekt: um 1 Längeneinheit. Damit bleibt die Steigung 1 auch wenn das Gewinde optisch feiner aussieht. Die Anzahl der Gänge hat keinen Einfluss auf die Steiung! Das gilt für jede Art von Gewinden und damit auch für die Schnecke.
Michael B. schrieb: > "Selbsthemmung tritt bei ... einem Steigungswinkel der Schnecke ɣ < 5° > auf" > (bei > 5 Grad also zunehmend nicht). Immerhin formuliert das Wikipedia so, dass es da Spielraum gibt, denn die Selbsthemmung hängt wesentlich vom "Wirkungsgrad" des Getriebes ab, schliesslich entsteht Selbsthemmung ausschliesslich aus der auftretenden Reibung. Und die wiederum hängt von der Fertigungsqualität ab. Das ist nicht anders als bei Linearantrieben: präzise geschliffene und gehärtete Kugelumlaufspindeln funktionieren ohne weiteres "rückwärts", man kann die Achse einer so angetriebene Maschine i.d.R. von Hand verschieben; dagegen kann man eine normale Mutter auf einer Gewindestange keineswegs verschieben, so dass sie sich dreht (wäre auch schlimm für alle Schraubverbindungen). Die 5 Grad sind daher nur ein Näherungswert. Ich würde schätzen, ein Schneckenantrieb aus Kunststoff ist bei jeder realisierbaren Steigung selbsthemmend. Andrerseits müsste jedes Getriebe mit 100% Wirkungsgrad die Kraft in beiden Richtungen übertragen, was allerdings reine Theorie ist. Georg
doedel schrieb: > Nein, die Gangzahl hat nichts mit der Steigung zu tun. Bleiben wir bei > unserer zweigängigen Schnecke. Können wir uns darauf verständigen, dass > das von mir oben gesagte korrekt ist und das Modul den Abstand von einem > Zahn zum anderen auch beim Schrägzahnrad und damit auch bei der Schnecke > definiert? > > Das heißt also auch, dass ich bei dieser zweigängigen Schnecke einfach > einen Gang wegnehmen kann ohne dass sich am zweiten Gang etwas > verändert. Richtig? Alleine schon daran sieht man, dass die Steigung > damit nichts zu tun hat. Hier ist der Knackpunkt. Denn wenn du einen Gang wegnimmst, ohne am anderen etwas zu ändern, hast du auch den Modul der Schnecke geändert. Wenn der konstant bleiben soll, musst du die Steigung verkleinern. MfG, Arno
falsch. Am Modul der Schnecke ändert sich durch die Anzahl der Gänge gar nichts. Wenn ich eine zweigänge Schnecke habe, habe ich nur einen zweiten Zahn um 180 Grad verdreht auf den Zylinder "aufgewickelt". Bei einer 3 gängigen Schnecke sind es eben 3 um je 120 Grad versetzte "Zähne". Die Ausgestaltung jedes einezlnen Zahnes / Ganges bleibt aber exakt gleich und damit auch die Steigung / das Modul. Das ist der Trugschluss: wenn ich an einem normalen Zahnrad die Zahl der Zähne bei gleichbleibendem Durchmesser verändere, bekomme ich ein neues Modul. Das gilt nicht für die Gangzahl der Schnecke. Das einzige was sich ändert, ist die Anzahl der Zähne des Zahnrades, die ich mit so einer mehrgängigen Schnecke bewegen kann. Die Steigung bleibt aber immer die gleiche.
Georg schrieb: > Die 5 Grad sind daher nur ein Näherungswert. Ich würde schätzen, ein > Schneckenantrieb aus Kunststoff ist bei jeder realisierbaren Steigung > selbsthemmend. Andrerseits müsste jedes Getriebe mit 100% Wirkungsgrad > die Kraft in beiden Richtungen übertragen, was allerdings reine Theorie > ist. Richtig, der maximale Steigungswinkel ist der arcustangens des Haftreibbeiwerts bzw. um auch sicher anzuhalten des Gleitreibbeiwerts. Mit Stahl auf Stahl, gut geschmiert, kommt man runter bis ungefähr auf µ=0,1 -> maximal 5,7 Grad. (Metrische Normgewinde liegen so bei 2-3 Grad Steigungswinkel, also Sicherheitsfaktor ca. 2. Reicht, solange keine großen Vibrationen oder so dazu kommen...) Typische Kunststoffe für Zahnräder sind Polyamide (PA, z.B. Nylon) oder Polyoxymethylene (POM, z.B. Delrin). Die Gleitreibungszahl von Nylon auf Nylon, trocken, dürfte nur knapp unter 1 liegen, damit braucht man knapp 45Grad Steigungswinkel. Das klingt schlecht realisierbar :) MfG, Arno
doedel schrieb: > falsch. Am Modul der Schnecke ändert sich durch die Anzahl der Gänge gar > nichts. Wenn ich eine zweigänge Schnecke habe, habe ich nur einen > zweiten Zahn um 180 Grad verdreht auf den Zylinder "aufgewickelt". Bei > einer 3 gängigen Schnecke sind es eben 3 um je 120 Grad versetzte > "Zähne". Die Ausgestaltung jedes einezlnen Zahnes / Ganges bleibt aber > exakt gleich und damit auch die Steigung / das Modul. Nein, wenn die Ausgestaltung der einzelnen Zähne (einschließlich der Zwischenräume) exakt gleich bleiben würde, müsste sich die Steigung ändern. > Das ist der Trugschluss: wenn ich an einem normalen Zahnrad die Zahl der > Zähne bei gleichbleibendem Durchmesser verändere, bekomme ich ein neues > Modul. Das gilt nicht für die Gangzahl der Schnecke. Doch, auch da gilt das. Zumindest nach der im Maschinenbau gängigen Definition des Moduls, denn... > Das einzige was sich ändert, ist die Anzahl der Zähne des Zahnrades, die > ich mit so einer mehrgängigen Schnecke bewegen kann. Die Steigung bleibt > aber immer die gleiche. ...wenn sich die Anzahl der Zähne des Schneckenrads ändert, ändert sich der Modul des Schneckenrads. Die Schnecke soll mit dem neuen Schneckenrad zusammenarbeiten, also ändert sich auch ihr Modul, denn der Modul der Schnecke muss der gleiche sein wie der des Schneckenrads. Schau dir die Teile mal bei Mädler (www.maedler.de) im Katalog an. Eine eingängige Schnecke Modul 1 passt zu einem eingängigen Schneckenrad Modul 1, das mit 16 Zähnen und 16mm Durchmesser eine Übersetzung von 16:1 erreicht. Eine zweigängige Schnecke Modul 1 passt zu einem zweigängigen Schneckenrad Modul 1, das mit 16 Zähnen und 16mm Durchmesser eine Übersetzung von 8:1 erreicht - das heißt die zweigängige Schnecke Modul 1 hat eine doppelt so hohe "absolute Steigung" wie die eingängige, denn sie schiebt pro Umdrehung das Schneckenrad um zwei Zähne weiter, nicht nur um einen. Da die Schnecken den gleichen Durchmesser haben (ist hier so, muss nicht so sein) ist auch der Steigungswinkel ein anderer. MfG, Arno
doedel schrieb: > Gott ... Hier. > so wenig mechanisches Verständnis??? Glücklicherweise nicht so wenig mechanisches Verständnis wie der Industriemechaniker doedel. Da würde ich mich ja schämen. Georg schrieb: > Immerhin formuliert das Wikipedia so, dass es da Spielraum gibt Nun ja, daher schrieb ich "zunehmend", hast du wohl übersehen. Arno schrieb: > Schau dir die Teile mal bei Mädler (www.maedler.de) im Katalog an. Vorsicht, doedel informiert sich prinzipell nicht, sondern phantasiert das Blaue vom Himmel herunter. Ist vom Blauen aber absolut überzeugt.
na dann auf: zeigt mir eine Formel, in der das Untersetzungsverhältnis eines Schneckentriebes in Abhängigkeit von der Steigung der Schnecke definiert wird!
Das Übersetzungsverhältnis ist einzig und allein abhängig von der Gangzahl der Schnecke und der Zähnezahle des Zahnrades. Weder Steigung noch irgendwas anderes von eurem Gefasel hat darauf einen Einfluss.
und zeigt mir irgendeine Definition, in der die Steigung eines Gewindes in Abhängigkeit von der Gangzahl festgelegt wird. Denn auch das hat nichts miteinander zu tun. Ihr könnt nur leere Phrasen dreschen und Leute persönlich angreifen ... belastbare Fakten liefert Ihr aber nicht!
doedel schrieb: > belastbare Fakten liefert Ihr aber nicht! Zumindest wissen wir noch, daß es um die Selbsthemmung des Schneckengetriebes ging. Zur Erinnerung: c.m. schrieb: > vermute ich das es mit der steigung der schnecke zu tun hat > ob das zahnrad die schnecke drehen kann oder nicht.
Es gibt durchaus Schneckengetriebe, die andersrum funktonieren. Die alten Grammophone hatten eine 2- oder mehrgängige Schnecke. Die Schnecke dreht sich dementsprechend schnell und hatte den Fliehkraft-Regler für den Gleichlauf auf der Achse. Um das leichtgängig zu halten, ist das Zahnrad aus Pertinax und die Schnecke aus poliertem Stahl. Das hat Jahrzehnte super funktoniert. Heute kommt einem diese mechanische Konstruktion nicht mehr vor. Grüße Bernd
Das Missverständnis liegt darin, das doedel von Steigung spricht, diese für sich allein genommen aber keinen Einfluss auf die Selbsthemmung hat. Den Einfluss hat der SteigungsWINKEL, und der ist halt je nach Durchmesser der Schnecke unterschiedlich. Das selbe Spielchen geht doch bei Schrauben ab: wenn man die 2mm Steigung einer M16 auf eine M5 machen würde, fällt die Mutter kommentarlos ab.
Cool, wieder so eine Diskussion geworden, sehr informativ, Danke euch vielmals, auch wenns euch offensichtlich, zumindest teilweise, ein Bedürfnis war :)))) Gleich mal Link speichern. Das Prinzip ist sowas von logisch aber irgendwie stand ich echt aufm Schlauch, glaub hab mir zu viele Formeln reingezogen... Dass üblicherweise das Zahnrad nicht die Schnecke antreiben kann, ist klar, hat ja auch Vorteile, z.B. bei ferngesteuerten Autos, wenn man vom Gas geht, blockiert es und man kann mit den Dingern Powerslides machen. Ich kann mir aber vorstellen, dass es Systeme gibt, wo die Zähne des Zahnrades stark abgeschrägt sind und das Gewinde, bzw. der eine lange Zahn der Schecke ist entsprechend lang gezogen, sodass es nicht blockiert, ähnlich wie ein Brummkreisel, wenn ich mir das aber vorstelle, denke ich, dass der Energieverlust sehr hoch ist. So weit bin ich aber nicht in die Materie eingestiegen, mehrgängige Schnecken und Gewinde hab ich mir kurz angesehen, aber das mit dem blockierenden und nicht blockierenden hab ich ausgelassen. Und falls es jemand wissen möchte, es geht auch um ein ferngesteuertes Auto, ganz klassisch aufgebaut, mein Neffe spielt gerne mit seinem und dann will er, dass es rutscht und tritt es, ich will ihm das tunen, etwas größeren Motor, mit einer höheren Drehzahl und einem Getriebe für hohes Drehmoment, so dass das Teil höchstens so schnell wird wie original, mal gucken, obs driftet... Naja, ich machs wohl auch für mich, hihihi, einmal Bastler, immer Bastler ;)
Bastler schrieb: > so dass das Teil höchstens so schnell wird wie > original Wie das originale Spielzeug oder wie das richtige Auto? Natürlich driftet dein Miniaturporsche, wenn er mit 260 durchs Wohnzimmer fegt... Georg
Ne, wie das Spielzeug xD 260 fährts glaub ich nur ein Mal... Ist aber kein Porsche, sondern der rote von "Cars", dem Animationsfilm.
Angehängte Dateien:
-

IMGP1000_1zu30.JPG
78 KB
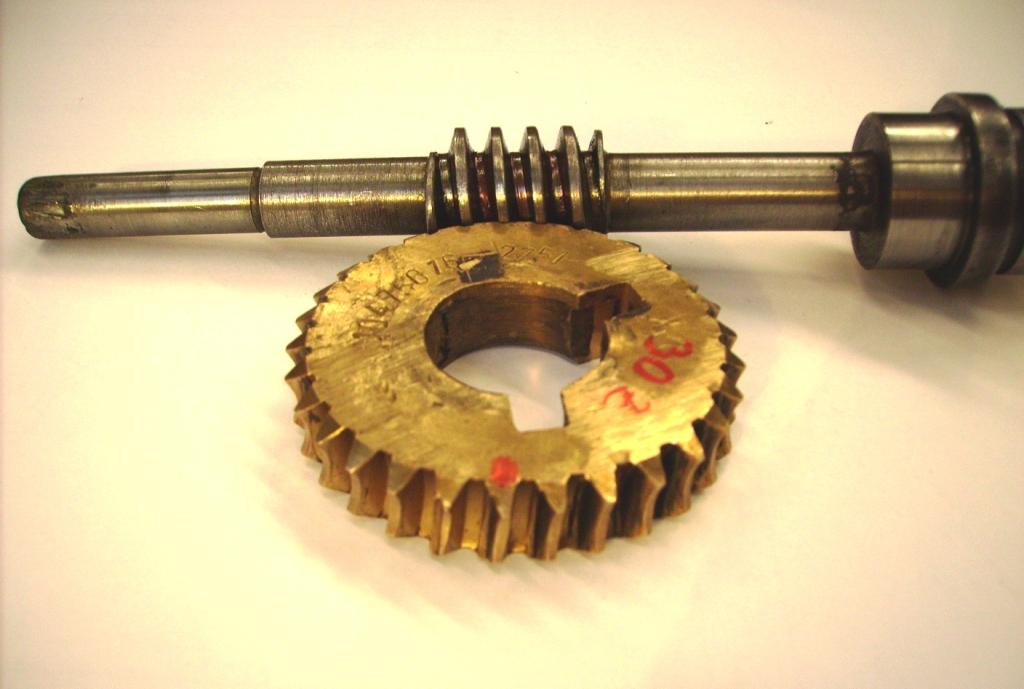
Hier ein ausgebautes Schneckengetriebe mit einer Untersetzung von 1 zu 30. Eine eingängige Schnecke und ein Schneckenrad mit 30 Zähne. Im übrigen hat doedel mit seinen oben genannten Erläuterungen tatsächlich Recht gehabt.
Angehängte Dateien:
-

DSCF3269_Wischermotor.JPG
36 KB -

DSCF3276_Kupplung.JPG
120 KB -

DSCF3281_Kettcar.JPG
140 KB



Wir haben bei einem Kettcar einen Ford-Scheibenwischermotor (Schneckenantrieb) eingebaut. Wenn ein Erwachsener damit bergab fährt und vom Gas geht driftet leider nix, man muss sogar Angst haben, dass die angetriebene Hinterachse sich verdreht und abreißt. Durch die Selbsthemmung bleibt das Kettcar ziemlich abrupt stehen. Aus diesem Grund haben wir eine Trennkupplung eingebaut, damit wir bergab wenigstens rollen können.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.