Hallo Liebe Mikrocontroller Community,
Ich hoffe ich bin hier richtig und erhalte ein paar Vorschläge bzw. Tips
zu meinem Vorhaben.
Aktuell arbeite ich an einem Forschungsprojekt der Uni und es geht
darum, die Schutzwirkung von Orthesen an einem menschlichen Fuß- bzw.
Sprunggelenksmodell zu untersuchen bzw. zu validieren.
Dabei soll untersucht werden, inwieweit eine Umknickbewegung durch die
Orthese zugelassen wird.
_Genauer_:
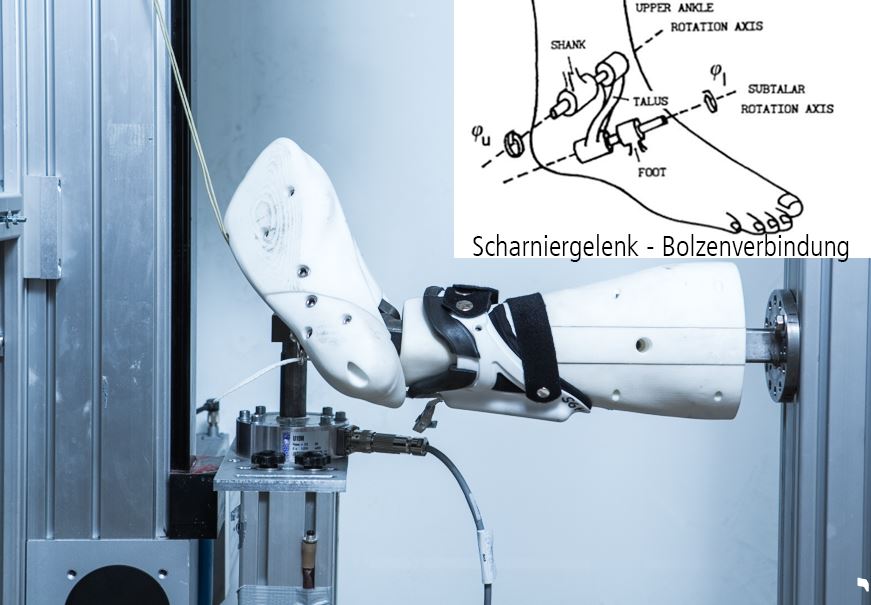
Das Sprunggelenk besteht aus einem obere und untere Sprunggelenk bzw.
Scharniergelenk, welches vergleichbar mit einer Bolzenverbindung ist.
Demzufolge liegen zwei unabhängige Rotationsachse vor (siehe Bild:
Pruefstand).
Testvorgang:
Der Test sieht so aus, dass das Fußmodell in einer vordefinierten
Nulllage liegt und dann ruckartig ausgelenkt wird (Umknickszenario).
*Aktueller Stand:*
Zur Erfassung der Kinematik bzw. der Rotationswinkel, die sich durch
diese Auslenkung ergeben werden „aktuell“ mithilfe von zwei
festverbauten Winkelsensoren gemessen (Halleffektdrehgeber).
*Neues Modell – Welche Messtechnik?*
Nun soll ein neues realistischeres Fußmodell verbaut und entwickelt
werden, welches keine feste Rotationsachse besitzt.
Die Idee. Wir nehmen ein anatomisches Fußskelett und wollen dieses in
Silikon gießen. Der Testvorgang soll derselbe, nur dass sich nun die
Kinematik aufgrund der Knochengeometrie komplett ändert.
*Das Problem:*
Zur Vermessung der Winkel am Fuß ist es nicht mehr möglich einfach nur
zwei Winkelsensoren zu verwenden wie im ersten Modell.
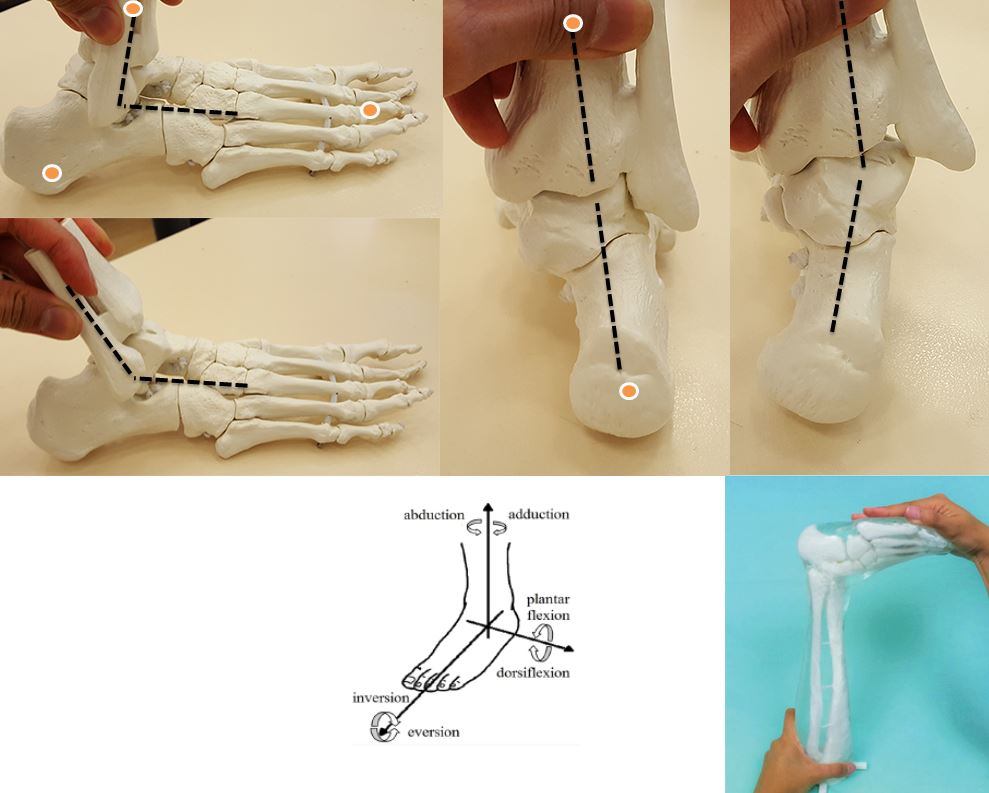
Mit welcher Messtechnik könnte ich also die Rotationswinkel im Fuß in
den verschiedenen Ebenen feststellen. Messtechnik bzw. Sensoren sollten
zudem klein sein, die eventuell sogar in die Knochen versenkt werden
können. (Siehe Bild Snesoraufbau)
*Ansätze:*
Das Verbauen Beschleunigungssensoren (siehe Bild, Orangene Punkte). Was
ich jedoch so gelesen habe ist, dass Beschleunigungssensoren zur
Positionsbestimmung nicht geeignet sind aufgrund der Integration.
Wäre ein Gyrosensor die bessere Lösung?
Und ob es 3 Sensoren sein müssen sei auch dahingestellt.
Ich hoffe ich habe die Problemstellung präzise genug dargestellt und
freue mich über jegliche Lösungsansätze oder Messtechnik, die man eher
von Anfang an ausschließen kann.
Eine Lösung mit Markern und einem Kamerasystem kommt /bzw soll erstmal
nicht in Frage kommen.
Einen schönen Samstag wünsche ich euch allen und vielen Dank schonmal.
LG chacky33
Erinnert mich stark an einen Analog 3D Joystick..zB. Playstation
analogstick.. die gibt es bestimmt Hochwertiger auch bis nahezu 180°..
So mal als Noob seh..
Julius H. schrieb:> Mit welcher Messtechnik könnte ich also die Rotationswinkel im Fuß in> den verschiedenen Ebenen feststellen. Messtechnik bzw. Sensoren sollten> zudem klein sein, die eventuell sogar in die Knochen versenkt werden> können. (Siehe Bild Snesoraufbau)>> *Ansätze:*> Das Verbauen Beschleunigungssensoren (siehe Bild, Orangene Punkte). Was> ich jedoch so gelesen habe ist, dass Beschleunigungssensoren zur> Positionsbestimmung nicht geeignet sind aufgrund der Integration.> Wäre ein Gyrosensor die bessere Lösung?
Könnte man ausprobieren, es gibt kombinierte ACC+Gyro Chips.
Wenn Dein Meßaufbau wenig Metall enthält, könnte man auch über
Magnetfeldsensoren nachdenken - die gibts ebenfalls als ACC+Mag. Das
bräuchte ein geschickt angelegtes externes Magnetfeld - und würde
vermutlich allergisch auf sämtliches Metall (nicht nur Eisen) im
Meßaufbau reagieren.
Wenn übrigens Deine Endposition "fest" ist, gäbe die Erdbeschleunigung
eine "feste" Achse ab, die ein 3D- Beschleunigungssensor auch gut
anzeigen kann.
Eine Umknickbewegung ist ja eher kurz, so das sich die Abweichungen beim
Integrieren der gemessenen Beschleunigung nur wenig aufsummieren können.
Hi,
Julius H. schrieb:> *Ansätze:*> Das Verbauen Beschleunigungssensoren (siehe Bild, Orangene Punkte). Was> ich jedoch so gelesen habe ist, dass Beschleunigungssensoren zur> Positionsbestimmung nicht geeignet sind aufgrund der Integration.> Wäre ein Gyrosensor die bessere Lösung?
Interessante Aufgabe!
Ein Gyro liefert ein Signal proportional zur Drehgeschwindigkeit. Wenn
Du das messen willst, d.h. wenn es Dir auf die Dynamik ankommt, könnte
das ein guter Ansatz sein. Um daraus jedoch absolute Winkel zu erzeugen
musst Du das Signal aufintegrieren, was langfristig natürlich
wegdriftet, wenn man keine Referenz hat.
Ein (3-Achs-) Beschleunigungssensor misst i.d.R. die Erdbeschleunigung.
Durch die Verteilung dieser auf die drei Achsen kann man die absolute
Lage im Raum bestimmen. Solche Dinger sind z.B. in Smartphones etc.
verbaut. Wenn Du in jeden interessanten Knochen so einen einbaust, hast
Du von jedem die Lage und kannst die Winkel zwischen ihnen berechnen.
Das funktioniert so aber erstmal nur in Ruhe. Während einer Bewegung
messen sie natürlich die Beschleunigung dieser auch mit was die Sache
verkompliziert. Wenn es Dir auf die Lage nach der Abknickbewegung
ankommt, wäre das eine Lösung.
Aber am universellsten baust du beides ein, einen
3-Achs-Beschleunigungssensor und einen 3-Achs Gyro, dann kannst Du mit
"etwas" Mathematik alles ausrechenen. Und nein, mit der Mathe kann ich
Dir nicht helfen... ;-)
Eine sehr interessante Fragestellung. Eine Frage von wie realistisch
soll es sein, wie aufwendig darf es sein.
Dabei sollte man sich vergewaertigen weshalb ist der menschliche und
tierische Koerper flexibel ? Starr waere doch einfacher.
Nun, die auftretenden Kraefte sind geringer. Jede Restriktion fuehrt zu
hoeheren Kraeften. Will man erhoehte Kraefte ? Um wieviel duerfen die
erhoeht sein ?
Schade dass in der Medizin zu viele Physik-Pfeifen sind.
Julius H. schrieb:> Was> ich jedoch so gelesen habe ist, dass Beschleunigungssensoren zur> Positionsbestimmung nicht geeignet sind aufgrund der Integration.> Wäre ein Gyrosensor die bessere Lösung?
Um einen Winkel zu berechnen, muss man die Werte eines Gyros integrieren
oder man nimmt die Werte eines Beschleunigungsmessers direkt - es ist
also genau umgekehrt. Ist wohl ein Leseproblem.
Beim Beschleunigungssensor weiss man wo unten ist, wegen der
Erdanziehung. Aber die Ausrichtung parallel zur Erdoberfläche ist
unbekannt, und da hilft auch ein Gyro nicht weiter. Die liefert nur ein
Magnetfeldsensor.
Georg
Julius H. schrieb:> Einen schönen Samstag wünsche ich euch allen und vielen Dank schonmal
Schön, chacky33, so würde ich das auch (eher nicht) machen.
Wirf etwas in die Runde und schau am Montag mal, ob was brauchbares
dabei ist :-)
Hi,
wie wäre es mit Photogrammetrie? Man könnte vielleicht aus den Knochen
etwas längere Stifte mit Marken (retroreflektierende Kugeln z.B.) durch
das Silikon stehen lassen und dann das ganze mit ein paar Kameras
fotografieren (Filmen). Aus den Bildern müsste man relativ einfach die
Lage der Knochen ermitteln können. Das ginge vermutlich im Prinzip auch
an einem Patienten, die nötigen Schrauben im Knochen sind allerdings
sicher nicht lustig. Vielleicht gibts aber man jemand, der eh einen ext.
Fixator hat und die orthese testen könnte bevor man den die Pins des
Fixator entfernt. Wahrscheinlich sind solche Stifte aber im Weg, die
orthese wird den Fuß vermutlich weitgehend umschließen.
Grüße
Flo
Florian R. schrieb:> wie wäre es mit Photogrammetrie?Julius H. schrieb:> Eine Lösung mit Markern und einem Kamerasystem kommt /bzw soll erstmal> nicht in Frage kommen.
:-)
Hi Olly
ups... das kommt davon wenn man grad mal so die Hälfte liest und denke
alles ist ein Nagel auf den der eigene Hammer mit dem man grad arbeitet
passt. Sorry.
Hall Sensoren sind ja eh schon angesprochen worden, da gibt's auch fix
fertiges für drei Achsen:
https://www.melexis.com/en/insights/knowhow/triaxis-position-sensing-solution
Irgend wo hatte ich sogar mal ein Muster von denen für einen der 3achs
Sensoren... dürfte aber ziemlich unauffindbar sein und ich hab ihn nie
getestet, es kam ein einfacherer Sensor von AMS zum Einsatz.
Grüße
Flo
Florian R. schrieb:> Hall Sensoren sind ja eh schon angesprochen worden, da gibt's auch fix> fertiges für drei Achsen:> https://www.melexis.com/en/insights/knowhow/triaxis-position-sensing-solution
Ist ja interessant, kannte (und brauchte) ich bisher nicht, aber gut zu
wissen, dass es sowas gibt. Manchmal hat man gar nicht für jede Lösung
ein passendes Problem. ;-)
Sowas könnte hier vielleicht auch passen, wenn man es hinkriegt, den
Magneten und den Sensor ausreichend genau im Fuß zu platzieren.
> es kam ein einfacherer Sensor von AMS zum Einsatz.
Einen AS5048B hab ich gerade in der Firma auch am Laufen, schönes Teil.
Julius H. schrieb:> Mit welcher Messtechnik könnte ich also die Rotationswinkel> im Fuß in den verschiedenen Ebenen feststellen.
"Rotationswinkel" - Ja.
"im Fuß" - Nein.
Polarisationsfilter, Photodioden, polarisiertes Licht.
Wow, ich bin erstmal überwältigt von den ganzen Antworten und dem
Support am gestrigen sonnigen Samstag.
Jim M. schrieb:> Könnte man ausprobieren, es gibt kombinierte ACC+Gyro Chips.>> Wenn Dein Meßaufbau wenig Metall enthält, könnte man auch über> Magnetfeldsensoren nachdenken - die gibts ebenfalls als ACC+Mag. Das> bräuchte ein geschickt angelegtes externes Magnetfeld - und würde> vermutlich allergisch auf sämtliches Metall (nicht nur Eisen) im> Meßaufbau reagieren.Florian R. schrieb:> Hall Sensoren sind ja eh schon angesprochen worden, da gibt's auch fix> fertiges für drei Achsen:> https://www.melexis.com/en/insights/knowhow/triaxis-position-sensing-solution>> Grüße> Flo
Das wird vermutlich schwierig. Der Silikonfuß mit dem Fuß ist zwar
Metallfrei, doch spätestens ab dem Schienbein wird mit einer
Metallverbindung /Stab das Ganze am metallischen Prüfstand fixiert =)
Aber das mit dem magnetischen Feld hört sich interessant an.
Habe in die Richtung mal weiter recherchiert und folgendes gefunden.
http://www.ndigital.com/medical/products/aurora/
Das ganze wird als Realtime Tracking System mit einem Magnetfeld.
Eine Kombination aus dem Magnetfeldgenerator und dem Triaxis von Melexis
wäre doch eine feine Lösung?
Stellt sich halt nur die Frage ob es beim Prüfaufbau aufgrund der
Metallhilfskonstruktion funktionieren könnte.
Jim M. schrieb:> Wenn übrigens Deine Endposition "fest" ist, gäbe die Erdbeschleunigung> eine "feste" Achse ab, die ein 3D- Beschleunigungssensor auch gut> anzeigen kann.>> Eine Umknickbewegung ist ja eher kurz, so das sich die Abweichungen beim> Integrieren der gemessenen Beschleunigung nur wenig aufsummieren können.
Da hast du recht, die ganze Umknickbewegung ist im Millisekundenbereich.
ca 20-60 ms. Dann ist die Messung auch zueende.
Bezüglich der Endposition. Da wir verschiedene Orthesensysteme und
Einstellungen testen werden, kann die Endposition varieren.
Zudem wollen wir auch verschiedene Umknickszenarien betrachten:
Aktueller Fall:
Fuß ist im Prüfstand eingespannt und der Fuß wird umgeknickt mithilfe
einer Schnur an der Außenkante des Fußes.
Weiterer Fall- etwas komplizierter
Wir wollen den Fuß beschleunigen und auf eine schiefe ebene fahren
lassen (realität: Man springt hoch und fällt auf den Fuß des Gegners wie
beim Volleyball)
Olly T. schrieb:> Interessante Aufgabe!> Aber am universellsten baust du beides ein, einen> 3-Achs-Beschleunigungssensor und einen 3-Achs Gyro, dann kannst Du mit> "etwas" Mathematik alles ausrechenen. Und nein, mit der Mathe kann ich> Dir nicht helfen... ;-)
Wieviel müsste ich optimaler weise verbauen?
Reicht einer oder ist das nach dem Motto, je mehr desto besser, wobei
ich ja ziemlich im Baureum begrenzt bin?
dünnwandiger Trog schrieb:> Eine sehr interessante Fragestellung. Eine Frage von wie> realistisch> soll es sein, wie aufwendig darf es sein.>> Dabei sollte man sich vergewaertigen weshalb ist der menschliche und> tierische Koerper flexibel ? Starr waere doch einfacher.>> Nun, die auftretenden Kraefte sind geringer. Jede Restriktion fuehrt zu> hoeheren Kraeften. Will man erhoehte Kraefte ? Um wieviel duerfen die> erhoeht sein ?>> Schade dass in der Medizin zu viele Physik-Pfeifen sind.
Natürlich sollte alles so realistisch sein wie möglich. Wir überlegen
uns in wieweit wir Bänder und Sehnen noch implementieren oder sogar DMS
einbauen um an der Stelle des Außenbandes am Fuß zu sehen, welche Kräfte
wirken.
Das wäre wohl die nächste Aufgabe, worüber ich mir den Kopf zerbrechen
muss, jedoch hat das eine geringe Priorität. Erstmal die Winkel kennen
Jedoch wäre jedes von uns eingbaute Band auch einen gewissen
widerstand/wie auch die Silikonhaut geben. Diese Restriktionen wollen
wir vor der Messung abschätzen und herausrechnen, so gut wie es geht.
Deshalb auch der Schritt aus einem mechanischen Modell mit nur 2
Freiheitsgraden (oberes und unteres Sprunggelenk jeweils eine
Bolzenverbindung) zu einem 3D gedruckten Fußskelett aus CT-Scans.
Michael L. schrieb:> BNO055 ist einfach zu benutzen
Der Boschsensor sieht interessant aus.
Wenn ich das richtig Verstehe: Beschleunigungssenser + Gyrometer = IMU
Georg schrieb:> Beim Beschleunigungssensor weiss man wo unten ist, wegen der> Erdanziehung. Aber die Ausrichtung parallel zur Erdoberfläche ist> unbekannt, und da hilft auch ein Gyro nicht weiter. Die liefert nur ein> Magnetfeldsensor.>> Georg
Ok Mit jeder Antwort werde ich schlauer, vllt wiederhole ich mich auch
mit dem Oben besagten.
Das heißt, falls ich meinen Fuß immer anders positioniere, mal 90 Grad
am Prüfustand wie im Bild, mal Hängend, oder Fallend, dann würde mir ein
Gyroskop nicht weiterhelfen?
Florian R. schrieb:> Hi,> wie wäre es mit Photogrammetrie? Man könnte vielleicht aus den Knochen> etwas längere Stifte mit Marken (retroreflektierende Kugeln z.B.) durch> das Silikon stehen lassen und dann das ganze mit ein paar Kameras> fotografieren (Filmen). >> Grüße> Flo
Fällt leider Raus, da verschiedene Schuhsysteme auch noch auf den Fuß
kommen =)
Ich bedanke mich nochmals für eure Antworten und hoffe auf eine zweite
Runde =)
schönen Sonntag euch allen
Julius H. schrieb:> dann würde mir ein> Gyroskop nicht weiterhelfen?
Ein Gyroskop ist immer problematisch, weil die Werte intergriert werden
müssen und sich damit Fehler aufaddieren, aber für Kurzzeitmessungen mag
es gehen. ABER: die Ausgangsposition muss bekannt sein, weil ja nur
Änderungen gemessen werden - stell dir ein Flugzeug vor; das Gyroskop
zeigt Drehungen an, intergriert kannst du dann sagen, das Flugzeug hat
sich 20 Grad nach links gedreht - aber in welcher Richtung es zuvor
flog, musst bekannt sein aus anderen Messungen (Kompass oder GPS).
Für dein Problem heisst das, zusätzlich zum Gyroskop müsstest du die
Orientierung vor Beginn des Messvorgangs irgendwie erfassen. Das
Gyroskop liefert dann die Änderungen relativ dazu. Im Endeffekt hast du
dann 2 Probleme am Hals statt eines.
Georg
Julius H. schrieb:> Das ganze wird als Realtime Tracking System mit einem Magnetfeld.> Eine Kombination aus dem Magnetfeldgenerator und dem Triaxis von Melexis> wäre doch eine feine Lösung?
Ich würde einfach das Erdmagnetfeld nehmen und einen kombinierten
3D-Beschleunigungsmesser+3D-Gyroskop+3D-Manetometer wie im BNO055 nehmen
und ein Exemplar am/im Fußrücken montieren, einen weiteren im
Unterschenkel.
Aus beiden Sensoren kann dann mit Hilfe einiger Vektorberechnungen die
aktuelle Stellung des Sprunggelenkes berechnet werden.
Die Sensoren gibts bei eBay als kleine Breakout-Platinen fertig für ein
paar Euro, oft direkt aus China.
Um die Magnetfeldsensoren möglichst wenig zu stören, muss die gesamte
Mechanik aus nichtmagnetischem Material gefertigt werden. Störeinflüsse
lassen sich bestimmen, indem man die ganze Apparatur in verschiedenen
Stellungen zum Erdmagnetfeld dieselben Aktionen ausfürhren lässt und
dann die Sensorergebnisse vergleicht.
Julius H. schrieb:> Wieviel müsste ich optimaler weise verbauen?> Reicht einer oder ist das nach dem Motto, je mehr desto besser, wobei> ich ja ziemlich im Baureum begrenzt bin?
In jedem bewegten Teil, der Dich interessiert würde ich einen
3-Achs-Gyro und einen 3-Achs-Beschleunigungsmesser einbauen, das halte
ich für ein gangbare Lösung. Gibt's vermutlich schon kombiniert in einem
Chip.
Der Beschleunigungsmesser zeigt Dir die absolute Lage im Raum jedes
Teils vor der Messung an.
Während der Messung integrierst Du die Werte der Gyros, dadurch kannst
Du dann während der Bewegungsphase die Winkel berechnen. Da es nur um ms
geht, sollte das keine Problem mit wegdriften ergeben.
Am Ende, wenn wieder alles in Ruhe ist, kannst du den aufintegrierte
Wert wieder mit den Werten der Beschleunigungssensoren vergleichen bzw.
angleichen.
Während der Messung alle Sensoren mit ausreichender Frequenz abfragen
und mitloggen, danach kannst Du am PC die Logs auswerten.
Der Übergang von Ruhe zu Bewegung sollte sich anhand der Ausschläge der
Gyros gut erkennen lassen.
Spannungsoptik wäre auch eine Möglichkeit:
https://de.wikipedia.org/wiki/Spannungsoptik
Vielleicht eine transparente elastische Kunststoffhaut die man als
flächige, flexible Lightpipe benutzt. An der einen Seite koppelt man
(farbiges) Licht ein, auf der anderen Seite empfängt man dieses mit
einem Linienformigen Fotosensor. Durch das Abknicken sollte sich der Weg
des Lichtes in der Haut ändern was über den Photosensor detektierbar
ist. Also sozusagen ein Gewebe aus Lichtleitern.