
Guten Tag, Regelungstechnik ist bei mir leider inzwischen etwas eingerostet und daher hoffe ich, dass ich vielleicht hier ein paar Anregungen für mein Vorhaben finden kann. Also folgende Ausgangslage: Ich habe hier einen Versuchsaufbau bei dem die Position eines Balles auf einem Förderband mit einem Frequenzumrichter, der eine Asynchronmaschine ansteuert, geregelt werden soll. Die Position des Balles wird dabei von einem Abstandssensor gemessen und als Ist-Wert an den Regler in der SPS weitergegeben. Der Sollwert beträgt 75 cm. Im Anhang seht ihr eine kleine Skizze von meinem Aufbau. Das klappt soweit auch ganz gut, allerdings möchte ich nun die Regelung etwas optimieren. Dazu möchte ich zunächst mal die Sprungantwort der Strecke aufnehmen. Die Strecke ist für mich: Asynchronmaschine + Förderband + Ball. Ich habe mir nun folgendes gedacht zur Aufnahme der Sprungantwort gedacht: - Den Stellwert des FUs von 0 auf 100 stellen -> Sprung auf die Strecke - Dann alle 5ms den Abstand des Balles zum Sensor messen und wegspeichern. Und dann müsste ich doch eigentlich die Sprungantwort der Strecke haben, oder? Ich wäre euch für Anmerkungen und weitere Vorschläge sehr dankbar. Mit freundlichem Gruß, Kaden
Angehängte Dateien:
-

Unbenasdfannt.PNG
9,4 KB
Völlig OT, aber ich habe zunächst gelesen: "Sprungantwort einer Schnecke" War wohl ne lange Nacht... Old-Papa
Kaden A. schrieb: > Regelungstechnik ist bei mir leider inzwischen etwas eingerostet Ich bin da vor kurzem erst eingestiegen, ich versuche es dennoch mal. Aber nicht böse werden, wenn alles Quatsch ist. > Die Strecke ist für mich: Asynchronmaschine + Förderband + Ball. Kann man den Sensor einfach weglassen weil 1. reines P-Glied und 2. schnell im Verhältnis zu den anderen Komponenten der Strecke? > Ich habe mir nun folgendes gedacht zur Aufnahme der Sprungantwort > gedacht: > - Den Stellwert des FUs von 0 auf 100 stellen -> Sprung auf die Strecke > - Dann alle 5ms den Abstand des Balles zum Sensor messen und > wegspeichern. > Und dann müsste ich doch eigentlich die Sprungantwort der Strecke haben, > oder? Würde ich erstmal auch vermuten. Mich würde interessieren, wie sich dein Aufbau genau verhält. Ist das System "ruhig"? Denn wenn der Ball z.B. erstmal in Drehung versetzt ist, muss das Band ja ständig laufen, um die Position des Balls zu halten. Falls es sich so verhält, kombinierst du das irgendwie mit einer Geschwindigkeitsregelung? Hast du mal versucht, das ganze absichtlich "zum Laufen" anzuregen, indem du z.B. das Band laufen lässt und dann den Ball mit zwei Fingern als Achsaufhängung auf das Band setzt, sodass er schon eine Drehung mitbekommt? Wie genau ist die Strecke Band+Ball überhaupt charakterisiert? Ich kenen mich mit FUs nicht aus, deshalb lass ich das mal weg. Aber die Eingangsgröße von Band+Ball ist ja die Beschleunigung des Bandes. Dann gibt es als erste innere Größe schonmal die Bandgeschwindigkeit. Die Beschleunigung des Bandes überträgt sich auf den Ball ja auf zweierlei Arten, wenn man mal von 0 Schlupf ausgeht: Einmal als horizontale Beschleunigung und einmal als Drehmoment. Das Verhältnis dürfte abhängig sein 1. vom Gewicht des Balls und 2. davon, wie das Gewicht im Ball verteilt ist. Das könnte man variieren, indem man Gewichte auf dei Hülle klebt. Z.B. erstmal eines Links und rechts, sodass sie zur Trägheit gegen das Drehmoment nichts beitragen und dann einmal unten und oben bzw. ein Stückchen nach vorne und hinten versetzt, sodass man ungestört fast eine halbe Drehung hinbekommt. Als weitere innere Größen ergeben sich also das Drehmoment auf den Ball, was aber proportional zur Bandbeschleunigung ist, die Drehrate des Balls und sie horizontale Geschwindigkeit des Balls. Wie regelst du überhaupt, Zustandsregler? Hast du das mal in Scilab o.Ä. simuliert? > Ich wäre euch für Anmerkungen und weitere Vorschläge sehr dankbar. Von mir gibts bestenfalls Anregungen. Ich bin da selber noch sehr wackelig.
Old P. schrieb: > Völlig OT, aber ich habe zunächst gelesen: "Sprungantwort einer > Schnecke" Hast du da auch ein Bild vor Augen gehabt? :)
Angehängte Dateien:
-

Sprungantwort.PNG
9,1 KB
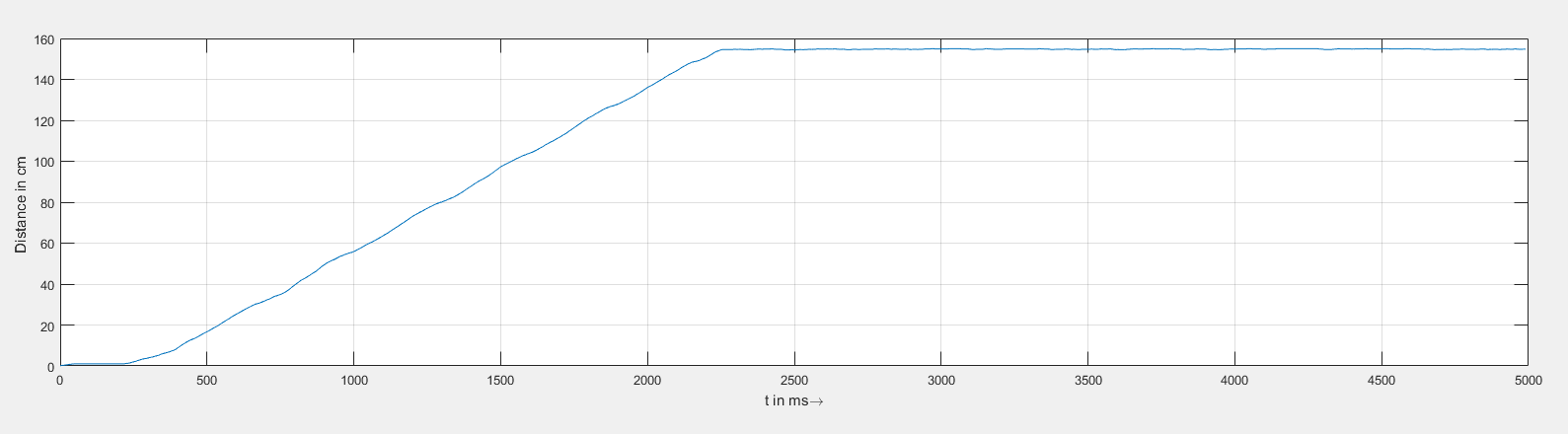
Md M. schrieb: > Denn wenn der Ball z.B. erstmal in Drehung versetzt ist, > muss das Band ja ständig laufen, um die Position des Balls zu halten. Das System ist ruhig, da dem Regler eine Totzonenbreite (Dead-Band-Width) von 2cm zugestehe. D.h. der Ball darf in einem Bereich von +/- 2cm neben dem Sollwert liegen. Das bekommt der Regler auch hin. Md M. schrieb: > Hast du das mal in Scilab o.Ä. simuliert? Ne, ganz einfach aus dem Grund, weil mir dazu das Streckenmodell fehlt. Ich habe jetzt einfach mal die Strecke als eine Art Blackbox betrachtet und den Stellwert des FUs von 0 auf 100 gestellt. Der Ball lag zunächst ganz rechts auf dem Förderband und habe dann für fünf Sekunden die Daten des Sensors aufgenommen. Im Anhang habe ich mal einen Screenshot von meiner aufgenommenen Sprungantwort angehängt. Die Daten sind mit Matlab gefiltert worden. Die Sprungantwort sieht für mich so aus als wenn die Strecke ein Totzeitglied (etwa 250ms) mit einem in Reihe geschalteten I-Glied ist.
Kaden A. schrieb: > Die Sprungantwort sieht für mich so aus als wenn die Strecke ein > Totzeitglied (etwa 250ms) mit einem in Reihe geschalteten I-Glied ist. Mit meinem Halbwissen würde ich eigentlich für eine Teilstrecke, die am Eingang Beschleunigung sieht und am Ausgang Position (ja, da lass ich die Drehung untern Tisch fallen) immer zwei I-Glieder annehmen, wobei dazwischen noch die Geschwindigkeit ist, die noch gedämpft wird. Wenn ich jetzt nur die Drehung betrachte und die transversale Bewegung außer Acht lasse, dann würde ich das selbe bzw. was ähnliches annehmen, nämlich am Eingang Drehmoment statt Beschleunigung, am Ende der Drehwinkel. Dazwischen die Drehrate, die ebenfalls gedämpft wird. Diese beiden Ketten aus I-Gliedern mit Dämpfung dazwischen würde ich als parallelgeschaltet betrachten. Dabei hat ein Zweig mehr Einfluss als der andere. Das erkläre ich mir durch betrachtung von zwei Extremen: Stell dir den Ball als Rolle vor, am besten sogar als "Spulenkörper", der also über das Band hinausragt. Wenn die Räder an den Enden der Spule sehr groß sind und da quasi eine dünne Achse auf dem Band liegt, hat man quasi kein Drehmoment und die Achse wird sich mit dem Band bewegen. Das andere Extrem ist eine extrem dicke Achse, das Band hat also einen extrem langen Hebel. Die Rolle wird sich nicht horizontzal bewegen sondern drehen. Zusammengefasst: Zwei Zweige parallel, jeder besteht aus I-Glied - Dämpfer - I-Glied Wie die zusammengeführt werden müssten weiß ich auf Anhieb aber auch nicht. Denn wenn man z.B. das Band nach rechts laufen lässt, der Ball sich also langsam nach rechts bewegt und linksrum dreht, dann das Band stoppt, will der Ball wegen seines horizontalen Schwunges weiter nach rechts, wegen seines Drehschunges aber nach links. Jedenfalls erkläre ich mir so deine lineare Kennlinie zwischen 250ms und 2250ms.
Also ich bin mir ziemlich sicher, dass meine aufgenommene Sprungantwort korrekt ist. Habe auch mal mit Matlab simuliert und komme da auf einen ähnlichen Verlauf. Dabei habe ich aber ein paar vereinfachende Annahmen angenommen: 1.) Motor + Getriebe -> PT1-Glied 2.) Drehzahlabhängige Position des Balles auf dem Förderband -> I-Glied In diesem PDF auf Seite 4 ist ein ähnliches Beispiel gegeben: http://staff.ltam.lu/feljc/school/asser/7_I-Strecken.pdf Natürlich ist das Modell jetzt erst ein mal sehr einfach und nicht sehr genau, aber es ist ein Anfang. Und ich muss sagen, dass das Simulink Modell der wahren Sprungantwort schon überraschend nah kommt.
Von der Sprungantwort her ist die Strecke integrierend. Dh man benortigt keinen I-Anteil der Regelung, ein D und P sollte erst man genuegen. Dazu kommt aber noch das Traegheitsmoment des Balles. Und allenfalls schleift der Ball bei einer hohen Beschleunigung.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.