
Hallo, eine kurze Frage: Ich möchte eine Asynchronmaschine per U-f-Steuerung simulieren. Ich habe es so weit hinbekommen, allerdings schwankt mein Drehmoment beim Anfahren ziemlich stark (siehe Bild). Sollte es bei der U-f-Steuerung allerdings nicht konstant bleiben bis zum Feldschwächbetrieb? Danke!
Angehängte Dateien:
-

Drehmoment.PNG
6,7 KB
Niemand eine Idee? Leider fehlt mir hier der Praxisbezug. Wie sieht das Drehmoment bei der U-f-Steuerung im Normalfall aus, wenn man z.B. auf die Bemessungsdrehzahl anfährt?
Tim A. schrieb: > Niemand eine Idee? Leider fehlt mir hier der Praxisbezug. Wie > sieht das Drehmoment bei der U-f-Steuerung im Normalfall aus, wenn man > z.B. auf die Bemessungsdrehzahl anfährt? Naja, da sind ja nicht einmal Achsenbeschriftungen am Diagramm, und ob du da eine Strecke simulierst oder was auch immer erwähnst du auch nicht. Grundsätzlich wird das Drehmoment nicht negativ werden (wenn ich dein Diagramm richtig interpretiere/rate), also stimmt es nicht. Wenn du aber dahinter eine schwingende Strecke hast ist das was anderes.
Hallo, mit U/f-Steuerung ergibt sich das Drehmoment aus der Last, es wird nicht geregelt. Ebenso stellt sich der Fluss gem. verwendeter Spannungskennlinie ein. Bei einer leerlaufenden ASM ist das Drehmoment sehr klein, entspricht dem Lastmoment (Reibung etc). Wenn das Modell stimmt, muss sich bei kleinen Drehzahlen und Drehmomenten ein +/- Istwert für das Drehmoment abbilden, welches als Gleichanteil das Lastmoment enthält. Die +/- Welligkeit ist durch die Pulsfrequenz des PWR verursacht. Aber immer daran denken, bei U/f-Steuerung wird nichts geregelt!! Gruß MKch
Das Biod sieht so aus, als ob du einen Motor ungeregelt mit Momentensprung belastest. Ist das Anfahren Rampengesteuert? Ansonsten ist das das klassische Reaktionsverhalten der Maschinenauf einen Momentensprung, welcher im Lastmomemt ausgeregelt wird bis Schlupf wieder komstmat ist. Bisl Information wäre manchmal hilfreich
Angehängte Dateien:
-

Verlaeufe.PNG
19 KB
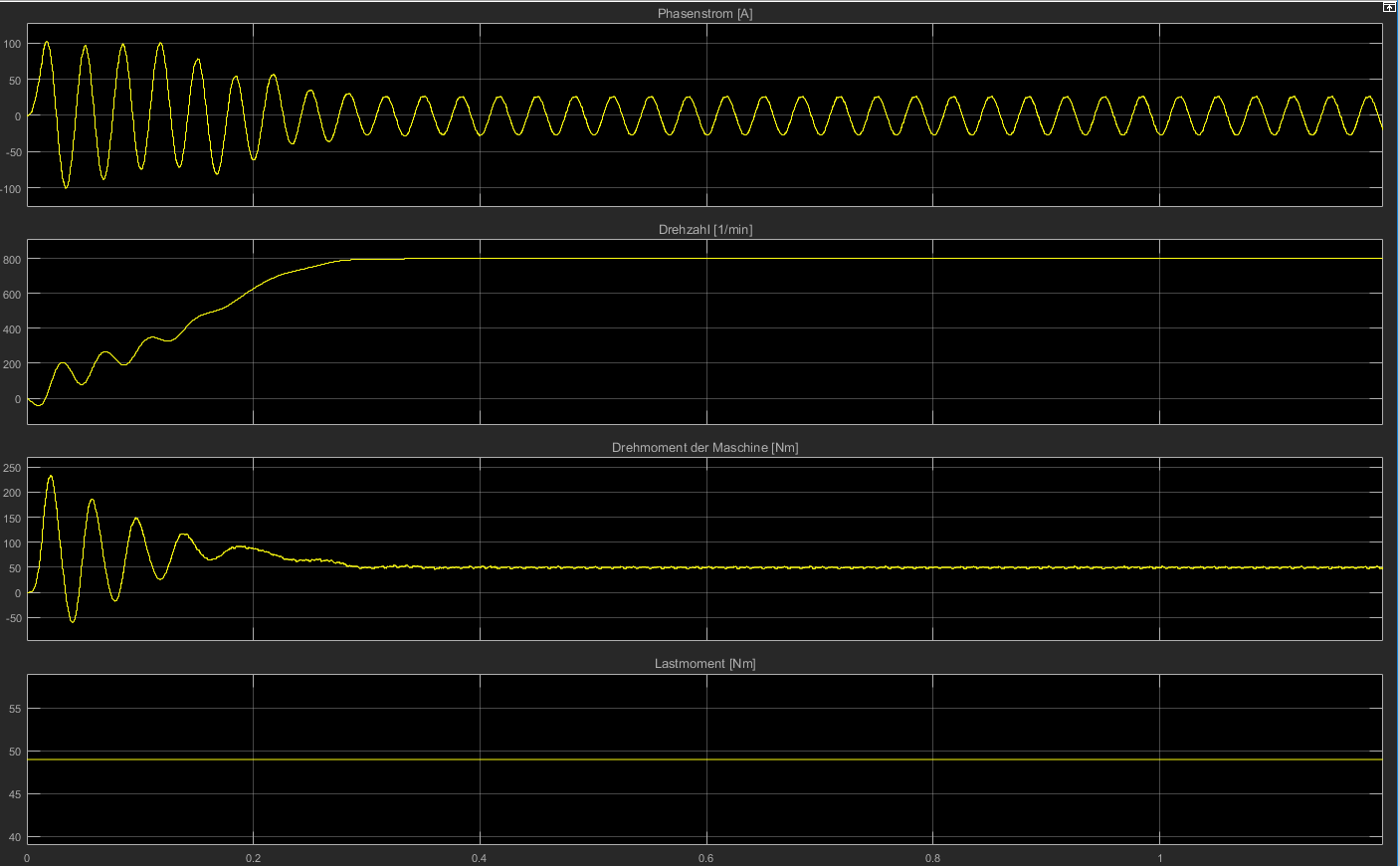
Sorry für die wenigen Informationen und danke für die Antworten. Ich gebe gleich zu Beginn eine Last von 49 Nm auf die Asynchronmaschine. Die Asynchronmaschine steuere ich mittels U-f-Kennliniensteuerung über einen Wechselrichter an. Folgende Verläufe für Phasenstrom, Drehzahl, Drehmoment sowie Lastmoment stellen sich ein (siehe Anhang). In der Literatur findet man allerdings folgende Abbildungen für das Drehmoment des Motors: http://1.bp.blogspot.com/-4lJhIlvX2Lk/VqxXjb4Gb-I/AAAAAAAABWE/sbX2_NOa5mM/s1600/VF%2Bcontrolled.jpg D.h. man würde entsprechend ein konstantes Drehmoment beim Anfahren haben, was bei meiner Simulation nicht der Fall ist.
{kind=link}
Für mich sieht das so aus, als hättest du die Parameter des Reglers nicht richtig gewählt (I zu klein? P zu groß?). Das hat aber nichts mit dem V/f Verhältnis zu tun, darum kümmert sich dein FU von alleine.
Die Reglerparameter müssten eigentlich so weit stimmen. Auch bei Änderung von P sowie I erhalte ich ein vergleichbares verhalten.
Tim A. schrieb: > Die Reglerparameter müssten eigentlich so weit stimmen. Kann ja nicht sein, dann würde er ja nicht aufschaukeln.
Ist es jetz doch ein Regelkreis? Oben heißt es gesteuert... Die Verläufe deuten darauf hin, dass die Frequenzrampe nocht vorhanden oder viel zu kurz ist. Direktes einschalten am Netz sieht ähnlich aus.
Die Mechanik stellt ein schwingfähiges System ein und der Regler ist dafür zu zügig eingestellt, daher schwingen. Mach mal nen arschlahmen P Regler draus und guck dann nochmal obs schwingt.
Nur wenn die Verhältnisse statisch sind, gilt die U/f-Kennlinie (wenn auch eine Spannung für die Drehzahl null dazuaddiert ist). Wird es "dynamisch", ist es nicht mehr so einfach; z.B. muss dann das vom Motor erzeugte Dremoment auch ihn selbst beschleunigen/bremsen.
d.h. wenn ich noch den Phasenwiderstand zu Beginn überwinde, indem ich eine Spannung hinzuaddiere, dürfte das Moment konstant bleiben?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.