Hallo, hoffe ich bin im richtigen Forenereich ansonsten bitte verschieben. Mein Problem bezieht sich auf meine CNC Fräse welche Nanotec BLDC Motoren(DB87) hat und die mit Leadshine ACS806 Endstufen betrieben werden. Die Motoren haben von Haus aus Hall Sensoren aber die Encoder die verwendet werden sind Avago HEDR55L2-BH07. Nun habe ich alles nach besten Wissen und Gewissen angeschlossen(auch schon mehrmal nachkontrolliert) aber bekomme es nicht fehlerfrei zum Laufen. Die Endstufen steigen immer wieder mit "Position following Error" aus. Dieser Fehler ist bei allen drei Achsen gleich aber bei jedem einschalten der Endstufen anders. Mal steigt nur eine Achse aus, mal zwei oder mal gehen auch alle und lassen sich problemlos verfahren. Was mir noch aufgefallen ist wenn mal alle Achsen fehlerfrei sind lassen sie sich gleichzeitig nur in eine Richtung bewegen, wenn ich die andere Richtung will stoppen die Achsen sobald die dritte dazu kommt. Hoffe es ist verständlich, gar nicht so einfach das zu beschreiben. Nun hab ich mich die Tage etwas damit beschäftigt(habe von solchen Dingen Null Plan) und festgestellt das die Encoder diffrential line Driver sind, sprich A/A- B/B- und I/I- Signale haben aber die Hall Sensoren nur U, V, und W Signale ausgeben und die U-, V- und W- fehlen. Könnte dort der Hase im Pfeffer liegen??? Wenn ja wie kann ich das Problem lösen? Die Endstufe hätte die Anschlüsse für die Minus Signale. Leider steht in der Anleitung zur Endstufe nicht über die Signale welche Encoder/Hall Sensor haben sollte. Würde mich freuen ihr könnt mir da weiter helfen. Gruß Daniel
Heißt das, die motorinternen Hallsensoren sind nicht angeschlossen? Wenn ja ---> geht nicht. Schaltplan!
Doch, doch angeschlossen hab ich die aber eben nur U V und W... mehr ist ja nicht. Als Datenblatt gibt's nur das: https://de.nanotec.com/fileadmin/files/Datenblaetter/BLDC/DB87/DB87M01-S.pdf
Vermutlich hast du für die Hallsensoren und die Motorzuleitungen nicht abgeschirmte Leitungen verwendet? Das ist keine gute Idee, weil der Strom auf den Motorleitungen Störungen auf den relativ hochohmigen Hallsensor-Signalen induziert. Ich würde daher nur abgeschirmte Leitungen in solchen Anwendungen verwenden. Falls das nicht geht, sollten Power- und Signalleitungen räumlich getrennt verlegt werden. Mit freundlichen Grüßen Thorsten Ostermann
Hallo Herr Ostermann, Nein die Vermutug stimmt nicht, es sind alles geschirmte Kabel und der Schirm ist Schaltschrankseitig aufgeklemmt. Ich glaube es liegt an den nicht vorhandenen/angeschlossenen invertierten Signalleitungen der Hall Sensoren. Höchstwahrscheinlich brauch die Leadshine ACS806 aber diese Signale. Leider steht in der Anleitung dazu nichts. Habe nun solche differential Line driver Platinen um die invertierten Signal zu erzeugen und werde die die Tage mal einbauen und sehen was passiert. Ähnlich wie diese: https://www.rocketronics.de/produkt/differentieller-leitungstreiber-fuer-encoder/?v=3a52f3c22ed6 Hoffe dann klappt es.
Daniel J. schrieb: > Leider steht in der Anleitung dazu nichts. Anleitung ist ein gutes Stichwort: http://leadshineusa.com/UploadFile/Down/ACS806m.pdf
Angehängte Dateien:
-

Capstan_SD240.png
110 KB
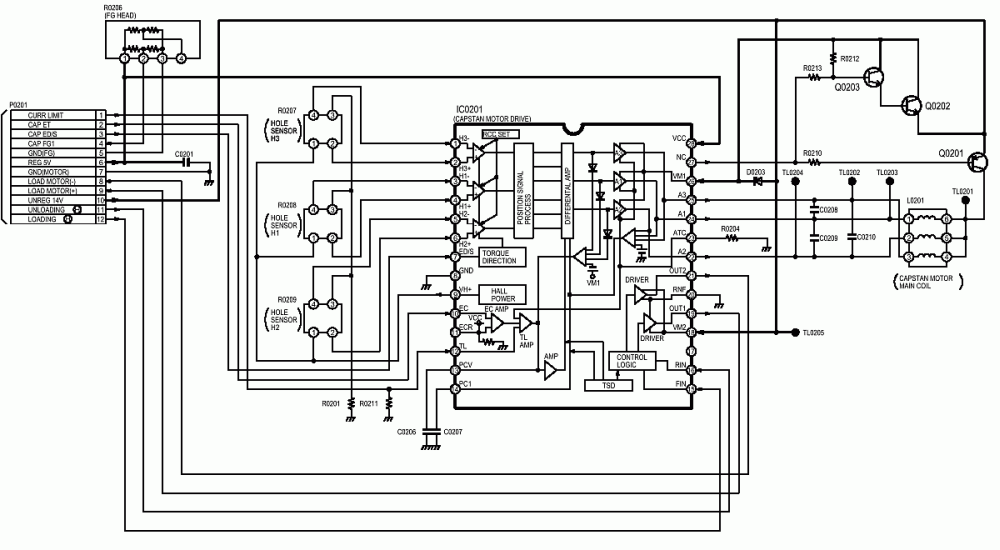
Für mich sieht das so aus, als würde der Controller 'analoge' Hallsensoren in Brückenschaltung erwarten, wie sie z.B. in Capstan- und Kopftrommelmotoren von Videorecorder verwendet wurden. Jeder dieser Sensoren hat 4 Anschlüsse, davon sind 2 für VCC und GND und die beiden anderen liefern +V und -V, wie die Signale einer Wheatstone'schen Brücke. Es sollte allerdings möglich sein, auch einen analogen Inkrementalgeber an die A+/A- usw. Anschlüsse zu konfigurieren. Mit digitalen Hallsensoren wird eine genaue Positionierung nicht möglich sein, selbst wenn man sie nochmal invertiert und in den anderen (-)Eingang füttert. Anbei mal die Schaltung eines alten Capstan Drives vom Panasonic SD-240, bei dem die Hallsensoren allerdings als 'Hole Sensor' bezeichnet werden - ts,ts, diese Japaner :-) Man sieht deutlich die 4 Anschlüsse pro Sensor. Forist schrieb: > Anleitung ist ein gutes Stichwort: > http://leadshineusa.com/UploadFile/Down/ACS806m.pdf Jaja, die haben wir ja auch. Aber da halten sich die Jungs sehr bedeckt über die Sensoren und die benötigten Spannungspegel. Lies selbst.
Warum schaut das für dich so aus? Die Endstufe hat aber definitiv die Anschlüsse dafür.
Carbonkid schrieb: > Warum schaut das für dich so aus? Wenn du mich meinst - der Controller wird als Ersatz für Schrittmotor Treiber angepriesen und hat deswegen auch Eingänge für Puls und Richtung. Um einen BLDC genau zu positionieren, reichen 3 digitale Hallsensoren nicht aus, die geben nur Rückmeldung, ob sich der Motor in einem von 6 Sektoren befindet, aber nicht über die genaue Position innerhalb des Sektors. Dazu braucht man entweder einen analogen Inkrementalgeber oder die Analogdaten aus den drei Hallsensoren. Im Prinzip kommt aus diesen Sensoren sowas wie Drehstrom (genauer: Drehspannung) raus und jede Position des Motors innerhalb einer Polgruppe entspricht genau einer Spannungskombination der drei Sensoren. So wie hier in der Animation: https://www.zum.de/dwu/depotan/apem112.htm Die Animation beschreibt den umgekehrten Fall (Strom treibt Motor), aber die Sensoren liefern die drei Sinuskurven wie in der Grafik, aus denen der Controller dann die genaue Position rauskriegt.
Ja Matthias dich hatte ich gemeint. Danke für die Erklärung. Es sind ja noch Encoder an den Motoren, somit sollte es doch dann funktionieren. Ich hab von dem Elektronik Kram keine Ahnung, wollte eigentlich nur fräsen ? Das würde dann deinen Ausführungen nach so klingen als wären die Endstufen für diese Motoren nicht geeignet.
Carbonkid schrieb: > Das würde dann deinen Ausführungen nach so klingen als wären die > Endstufen für diese Motoren nicht geeignet. M.W. (ich bin kein Spezi für CNC Fräsen - eher für BLDC) sind BLDC für Fräsen nicht geeignet (ausser evtl. fürs rotierende Werkzeug, dafür braucht man aber nicht so einen komplizierten Controller). Schrittmotoren lassen sich ohne grossen Aufwand genau positionieren, vor allem, wenn sie noch mit Index Rückmeldung ausgerüstet sind.
Naja wenn ich das auf der Nanotecseite lese sollten die aber schon geeignet sein und auch das mit den Hall Sensoren funktionieren. https://de.nanotec.com/produkte/156-bldc-motoren/
Carbonkid schrieb: > Naja wenn ich das auf der Nanotecseite lese Wenn du den DB87 anwählst und dann auf den Konfigurator klickst und 'Encoder' wählst, gibts da nur welche mit soundsoviel Impulsen pro Umdrehung aber keine Absolutencoder - die du aber für die Fräse bräuchtest. Das sind alles welche, die nur ein Digitalsignal 0 und 1 ausgeben, mit z.B. 5V Signalspannung, wie es bei Nanotec heisst. Das kannst du auch an den bei dir vorhandenen Motoren mal messen. Da spingt nur ein Signal zwischen 0V und 5V hin und her - keine Zwischenwerte. Also nee, die Motoren sind bestimmt schön, aber für 'High-Speed' Anwendungen gedacht (so stehts bei Nanotec) und nicht für absolute Position, die der Leadshine Controller aber nun mal gerne hätte. Der Controller soll ja die üblichen Schrittmotoren durch BLDC ersetzen, die dafür aber geeignet sein müssen. Das sind Motoren, wie sie z.B. in Gimbals eingesetzt werden: https://www.youtube.com/watch?v=lCRU35E6C3Y Über den Märchenonkel solltest du hinweghören, aber das Prinzip der Ansteuerung der Motoren ist eher das, was der Leadshine möchte.
Angehängte Dateien:
-

HallEffect.png
22 KB
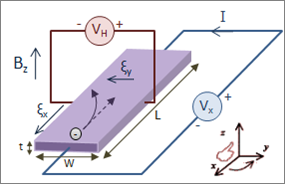
Matthias S. schrieb: > Für mich sieht das so aus, als würde der Controller 'analoge' > Hallsensoren in Brückenschaltung erwarten Das ist keine Brückenschaltung, das ist ein nackter Hallsensor wie im Bild oben. Den wertet man mit einem Differenzverstärker aus. Dazu kommt dann noch eine Stromquelle, meisst nur als zweigeteilter Vorwiderstand ausgeführt. Dann ensteht die Hallspannung etwa bei der halben Speisespannung. Die Hallspannung ist proportional zum Magnetfeld und zum Strom. Solche Sensoren mit 4 Anschlüssen findet man oft in CD Laufwerken. In manchen Motorkontrolern sind die Differenzverstärker schon drin. MfG Klaus
Ich denke, die Hallsensoren sollen bereits Verstärker integriert und digitale Ausgänge haben. > Ich glaube es liegt an den nicht vorhandenen/angeschlossenen > invertierten Signalleitungen der Hall Sensoren. Hier steht auf Seite 8, dass man die U-(15), V-(10) und W-(14) offen (NC) lassen soll, wenn nicht vorhanden: https://purelogic.ru/files/downloads/doc/Leadshine/servodriver/acs806/acs806_purelogic.pdf Hier stimmen im Wiring Example einige Pinnummern nicht: http://www.pamoco.it/Amministrazione/allegati_prodotto/ACS806_Pamoco.pdf > ... gibts da nur welche mit soundsoviel Impulsen pro Umdrehung > aber keine Absolutencoder - die du aber für die Fräse bräuchtest. > Das sind alles welche, die nur ein Digitalsignal 0 und 1 ausgeben, > mit z.B. 5V Signalspannung, wie es bei Nanotec heisst. Die Absolutmessung erfolgt wie beim klassischen Stepper mit Schaltern. Beim Encoder hast Du 2048 CPR (BH-Typ) eingestellt? Läuft der Motor in beiden Richtungen gleich schnell bei gleichem Stromverbrauch? Hier hat der OT sein Problem beschrieben: https://cncwerk.de/forum/viewtopic.php?t=402 Bitte ALLE Infos immer im ersten Beitrag angeben, auch Links zu den Datenblättern!
@eProfi Warum denkst du das die Hall Sensoren schon Verstärker integriert haben? Der Vorbesitzer der Fräse hatte solche differential Line driver verbaut, aber auch andere Endstufen(Eigenbau) und er meinte damals bei den leadshine bräuchte ich die nicht. Jetzt ist er sich auch nicht mehr so sicher. Der Zustand jetzt ist ja das ich die invertierten Signal offen gelassen hab. Doch so funktioniert es leider nicht. Warum in der Anleitung im Wiring example die Belegung nicht stimmt ist schon komisch. Ich hab mich an die Original Anleitung von Leadshine gehalten. Ja ich habe die Endstufen alle mit 2048 programmiert und ja die Motoren drehen in beide Richtungen gleich...was man halt rein optisch so feststellen kann. Den Strom hab ich da noch nie gemessen. Ja richtig im CNCwerk Forum hatte ich mein Anfangsproblem geschrieben weil ich die Motoren nicht zum laufen brachte. Ich hatte eben U- V- und W- auf EGND geklemmt, doch so funktioniert es gar nicht dann kommt sofort die Fehlermeldung "keine oder falsche Encoder/Hall Signale". Dann hab ich diese Verbindungen entfernt und es läuft jetzt so wie oben beschrieben. Werde es heute mit den Platinen probieren, sollte das keine Besserung bringen versuche ich es mal mit den Nanotec Endstufen C5E. https://de.nanotec.com/produkte/1764-c5-e-canopen-motorsteuerung-fuer-schritt-und-bldc-motoren/ Vielleicht liegt ja auch das Problem doch wo anders...keine Ahnung.
> Warum denkst du das die Hall Sensoren schon Verstärker > integriert haben? Weil aus einem puren Hallelement nur µV oder bestenfalls mV herauskommen. > Warum in der Anleitung im Wiring example die Belegung nicht stimmt > ist schon komisch. Irren ist menschlich. Und ja, Südländer nehmen es nicht ganz so genau. Wo sitzt Du? Wenn Du magst, kannst mir mal ein Set zukommen lassen.
Am Fuße des schönen Erzgebirges :-) Ich teste es dann mal mit der Platine, sollte das keine Verbesserung bringen komme ich gern auf dein Angebot zurück!
Das ist ziemlich weit. Beschreibe bitte genauer, wann und unter welchen Umständen es zum Fehler kommt. Wie groß ist die Fehlerschwelle und -Zeit beim Following-Error? Wie stark wird beschleunigt? Kommt der Fehler auch bei geringer Geschwindigkeit und Beschleunigung? N5E habe ich auch einen hier. Schließe die Abschirmung der Hall-Sensor-Leitungen mal nur am FG des Controllers an, nicht am Schaltschrank. Ferrit-Ringe oder -klipse an allen Leitungen helfen auch. Was mich an Deiner Beschreibung wundert: dass sich die Achsen gegenseitig beeinflussen. Das lässt auf ein schlechtes Gnd-Konzept schließen. Mach mal ein paar gute Fotos.
Klaus schrieb: > Matthias S. schrieb: >> Für mich sieht das so aus, als würde der Controller 'analoge' >> Hallsensoren in Brückenschaltung erwarten > > Das ist keine Brückenschaltung, das ist ein nackter Hallsensor wie im > Bild oben. Den wertet man mit einem Differenzverstärker aus. Du hast meinen Beitrag einfach nicht fertig gelesen. Die Brücke ist die Wheatston'sche: Matthias S. schrieb: > Jeder dieser Sensoren hat 4 Anschlüsse, davon sind 2 für VCC und GND und > die beiden anderen liefern +V und -V, wie die Signale einer > Wheatstone'schen Brücke.
@eProfi Riesen dank für deine Hilfe! So, heute hab ich den X Achsen Motor mit der Platine getestet. Er läuft genau wie vorher. niederschmetternd :-( Zur Ergänzung noch, Steuerung ist eine CSMIO-IP/M http://de.cs-lab.eu/product/csmioip-m-4-axis-ethernet-motion-controller-stepdir-with-connectors/ Steuerunssoftware ist Mach3. Was mir beim Test aufgefallen ist: Wenn ich die Maschine eingeschaltet habe haben sich ja die Motoren mal ohne Probleme drehen lassen und mal nicht. Den Feheler kann ich jetzt nach jedem Start der Maschine hervorrufen. Wenn ich die Motoren in die eine Richtung drehen lasse (alles manuell über Mach3) dann die Maschine aus und wieder anschalte und dann in die gleiche Richtung drehen will kommt der Fehler. Wenn ich sie in die entgegengesetzte Richtung drehen lasse laufen sie ohne Fehler. Das schaut mir nun nicht mehr nach einem Problem mit dem Hall Sensor oder Encoder aus sondern mit der Programmierung der Endstufen. Ist aber nur meine Vermutung. Zu deinen Fragen: >Fehlerschwelle und Zeit: keine Ahnung, wüßte auch nicht wo das angezeigt wird >Wie stark wird beschleunigt?: kann ich erst morgen nachschauen >Fehler bei geringerer Geschwindigkeit/Beschleunigung: noch nicht probiert >Abschirmung nur auf FG: muß ich morgen ändern Ferritringe: hab ich schon probiert hat keine Veränderung gebracht >"Was mich an Deiner Beschreibung wundert: dass sich die Achsen >gegenseitig beeinflussen. Das lässt auf ein schlechtes Gnd-Konzept >schließen." Das hast du falsch verstanden oder ich habe mich blöd ausgedrückt. Bilder der Leadshine Protuner Software, such ich gleich mal raus damit ihr seht was ich da eingestellt hab.
Angehängte Dateien:
-

Leadshine.jpg
200 KB -

Leadshine_2.jpg
180 KB -

Leadshine_3.jpg
180 KB
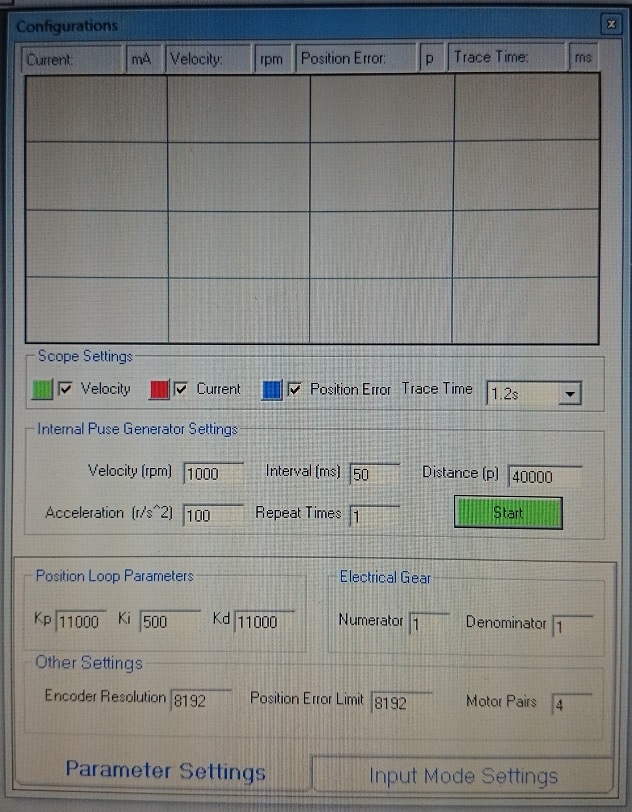
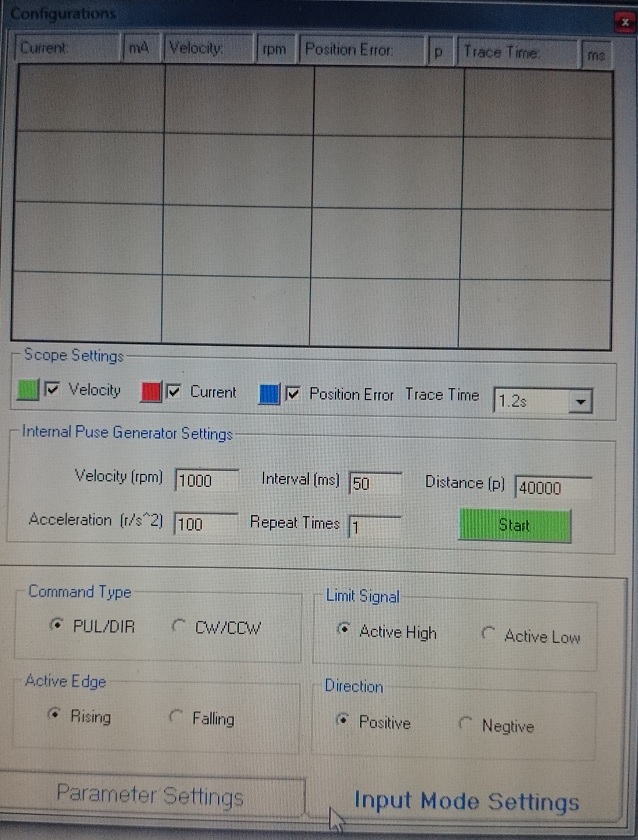
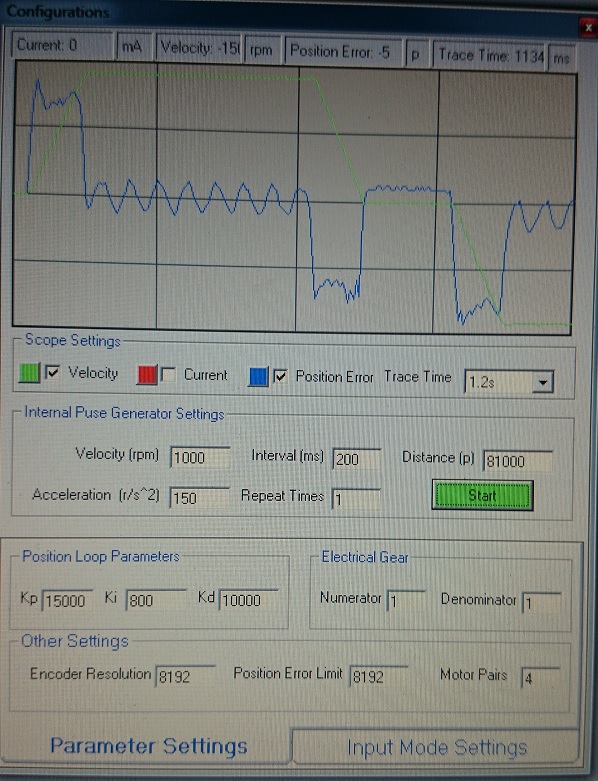
So hier mal zwei Bilder. Viel gibt es da nicht einzustellen. Die Encoder Resolution muß man mal 4 nehmen laut Anleitung, daher 8192. Aber das Ausschlaggebende für den Fehler wird wohl der Wert für "Position Error Limit" sein. Da hab ich einfach eine Zahl eingetragen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.