Guten Tag, ich versuche einen BLDC Motor mittels SVPWM zu drehen. Der Motor hat 3 Hallsensoren, über die ich beim Vorwärts 462315 und Rückwärts-Drehen 513264 Mustern während einer elektrischen Drehung bekomme. Nun würde ich gern wissen, bei welchem Zustand der Hallsensoren der Rotor den elektrischen Winkel 0 hat. Vielen Dank.
Giovanni schrieb: > Nun würde ich gern wissen, bei welchem Zustand der Hallsensoren der > Rotor den elektrischen Winkel 0 hat. Motorabhängig, teilweise auch montageabhängig. Muss man ausmessen, entweder manuell oder automatisch. Für letzteres muss man den Motor dann einmal eim Leerlauf am entsprechenden Regler laufen lassen.
Giovanni schrieb: > Nun würde ich gern wissen, bei welchem Zustand der Hallsensoren der > Rotor den elektrischen Winkel 0 hat. und du glaubst das wir ohne den Motor zu kennen, das beantworten können?
Peter II schrieb: > Giovanni schrieb: >> Nun würde ich gern wissen, bei welchem Zustand der Hallsensoren der >> Rotor den elektrischen Winkel 0 hat. > > und du glaubst das wir ohne den Motor zu kennen, das beantworten können? Ich kenne den Motor auch nicht. Mit Blockkommutierung läuft der Motor ohne Probleme mit dieser Hallausgaben.
Angehängte Dateien:
Jedensfalls, danach habe ich gesucht
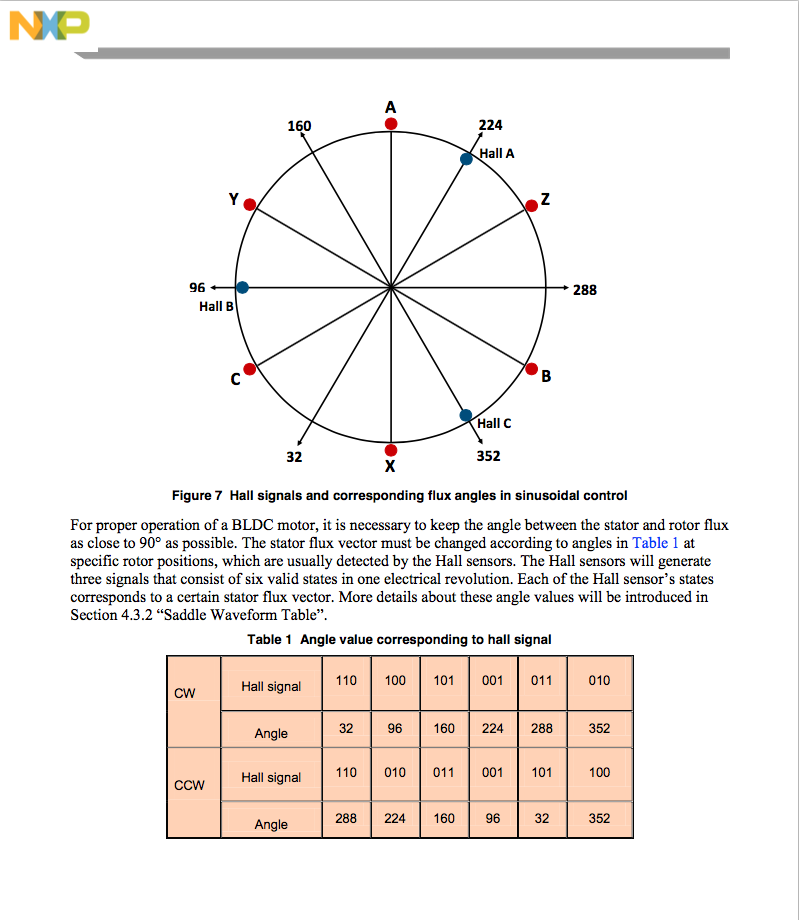
Hallo zusammen, Der Screenshot stammt von Freescale/NXP: https://www.nxp.com/assets/documents/data/en/application-notes/AN4869.pdf Meine Frage ist, wo ist 0° und bei welchen Winkeln sollen die Hallsignale wechseln? Ich habe einen kleinen Teststand gebaut, auf dem ich den Rotorwinkel auf unter 1° genau ablesen kann. Lasse ich durch zwei Phasen einen Gleichstrom fließen und lasse die 3. Phase offen, flippt der zweipolpaarige Motor in eine von zwei um 180° versetzte Positionen. Diesen Winkel definiere ich als 0°. Wenn ich nun den Rotor manuell drehe, bei welchen Winkel muss sich jeweils ein Hallsignal ändern? Klar ist, alle 30°, aber an welchen absoluten Werten? 15, 45, 75, 105 etc. oder 0, 30, 60, 90 etc. Unser Motorlieferant hat Probleme, die Toleranzen einzuhalten, dabei ist noch nicht mal klar, wo der Nullpunkt liegt. Oh je. Danke für Eure Hilfe.
Die Zahlen im Screenshot (32, 96, 160 224, 288, 352) sind verwirrend, da der Flux-Angle nicht mit 360°, sondern mit 384 Schritten (Größe der Lookup-Table) pro elektrischer Umdrehung angegeben wird.
bei den Hallzustandsübergängen kann man meiner Meinung nach die absolute Position bestimmen. Sonst weiß man nicht wo der Rotor sich zwischen x + 60 und x - 60 Grad befindet. Bei meinem Motor ist der Winkel 0 beim Übergang von 011 zu 001. Nur von dort läuft der Motor etwas ruhiger
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.