Hallo zusammen Da ich erfolglos versucht habe, meine Problem anhand verschiedenster Foren, auch mit diesem konkret zu verstehen und zu lösen, bitte ich Euch freundlich um Rat. Bezüglich der Bestimmung des für meinen Zweck benötigten Schrittmotor-Drehmomentes komme ich alleine zu keinem brauchbaren Ergebnis. Mein senkrecht an der Wand hängendes Bildobjekt muss folgendes können: - eine quadratische Holzfläche von 1.5 kg, mit den Abmessungen 500mm x 500mm - dreht sich, von einem Schrittmotor angetrieben in der Senkrechte um das eigene Zentrum - Drehgeschwindigkeit 0.05 U/sec bis 3 U/sec - Beschleunigungs/Bremsrampen sind vor/nach jeder Geschwindigkeitsveränderung gut möglich Da es sich um einen zentral drehenden, quadratischen Körper handelt, gibt es keinen Hebelarm. Den Foren konnte ich entnehmen, dass es sich hier um das Problem der Massenträgheit handelt welche vom Motor angetrieben resp. abgebremst werden muss. Sehe ich das richtig? Meine Frage: Welches minimale Drehmoment muss ein Schrittmotor, in Bezug auf die oben beschriebene Massenträgheit leisten? Wieviel Reserve soll eingeplant werden? Ich könnte nun einfach einen gefühlsmässig “zu grossen” Motor einbauen. Dies geht leider wegen der zur Verfügung stehenden Einbautiefe von max. 100mm nicht. Je nach Grösse wäre NEMA17 ideal - Nema23 ginge vom Platz her vielleicht gerade noch. Eine Übersetzung mittels Zahnriemen würde zwar mehr Kraft bringen. Eine solche wäre jedoch infolge des knappen Platzes schwierig zu realisieren. Auch bin ich bis jetzt vom Motortreiber BigEasy ausgegangen welcher 2A/Phase leistet. Das Ganze würde von einem Arduino UNO gesteuert. Nun die grosses Frage: Wieviel Drehmoment muss der Schrittmotor für mein Bildobjekt leisten? Ich bin für jeden Hinweis dankbar. Felix
Bei so kleinen Drehzahlen bietet sich ein schrittmotor mit Getriebe an. Der ist dann auch ohne haltestrom Selbsthemmend, das würde dir auch entgegen kommen.
herzlichen Dank! Werde mal schauen, ob ich einen solchen mit einer Einbautiefe von unter 100mm finde.
@ Arts Sensor Es handelt sich , wenn ich das recht verstehe, um einen Quader von 500mm * 500mm und das dritte Maß ist nicht gegeben. Die Angabe, dass die Drehachse durch das "Zentrum" geht, ist leider nicht präzise genug. Nötig wäre, zu wissen, ob die Drehachse durch den Schwerpunkt geht und wie sie durch den Körper verläuft. Ein "Zentrum" könnte auch ein geometrisches Zentrum sein, das bei einem homogenen Quader mit dem Schwerpunkt zusammenfällt, aber eben nicht grundsätzlich. Im Zusammenhang mit der fehlenden Kenntnis des genauen Verlaufs der Drehachse, muss man unter Umständen auch das dritte Maß kennen. Die Skizze unter Punkt k in dem Artikel https://de.wikipedia.org/wiki/Tr%C3%A4gheitsmoment#Haupttr.C3.A4gheitsmomente_einfacher_geometrischer_K.C3.B6rper wird Dir möglicherweise etwas weiterhelfen. Wenn nicht, frage nach, welches Detail unklar bleibt. Zu beachten ist, dass das fehlende Maß c dort nur dann wegfallen kann, wenn dir Drehachse rechtwinklig zu den beiden anderen Kanten des Quaders verläuft. Dein Beitrag liest sich zwar, als wenn diese Voraussetzungen gelten könnten, aber das ist doch nicht wirklich gesichert. Aber geht man davon aus, dass die beiden Maße von 500mm den Strecken a und b in der Skizze entsprechen und die Achse so verläuft, wie dort eingezeichnet ist, dann ergibt sich nach der Formel ein Trägheitsmoment J von: J = 1/12 * 1,5kg * ((0,5m)² + (0,5m)²) = 1/12 * 1,5kg * 0,5 * m² = 0,75 kg * m² / 12 J = 0,065 kg * m² (im Kopf gerechnet, ruhig mal nachrechnen) Um das Drehmoment auszurechnen, müsste man wissen, in welcher Zeit, welche Drehzahl erreicht werden soll. Die Enddrehzahl ist mit maximal 3/s angegeben. Das entspricht 3 2 pi rad = 6 * pi rad = 18,84 rad/s Nach der Gleichung der dynamischen Drehbewegung ist das nötige Drehmoment M (hier mal skalar): M = J * a (mit a = Drehwinkel in rad pro sekunde im Quadrat rad/s²) Etwas unrealistisch, aber weil einfacher zu rechnen, wird die Zeit, bis zu der die Solldrehzahl erreicht werden soll, mit einer Sekunde angenommen. Damit wird M = 0,065 kg * m² * 18,84 rad/s² M = 1,23 N * m (ich habe gleich mal die Umrechnung in Newton gemacht. Das Drehmoment entspricht üblicherweise, das hängt vom konkreten Motor ab, bei 180/min = 3/s gerade noch so dem Haltemoment. Etwas Reserve sollte man immer einplanen. Etwa Faktor 1,2 oder besser. Das liefe also ungefähr auf einen Nema 24 Motor hinaus. Zu groß für den Bauraum. Verlängert man die Zeit bis zu Solldrehzahl auf etwa 3,333s (das ergibt etwa ein Zehntel der Beschleunigung) so ergibt sich M = 0,065 kg * m² * 1,884 rad/s² M = 0,123 N * m Das ist dann etwa ein NEMA 17 Motor. In der Praxis wird die Beschleunigung wohl etwas geringer, aber nicht wesentlich geringer sein. Ich schätze etwa 80-90%. Siehe zum Vergleich: https://de.nanotec.com/produkte/153-schrittmotoren/ Hoffe das hilft. (Wäre nett, wenn mal jemand drüberguckt, ob ich nicht irgendeinen Fehler eingebaut habe).
herzlichen Dank für die umfassende und klärende Antwort! Theor schrieb: > Zu beachten ist, dass das fehlende Maß c dort nur dann wegfallen kann, > wenn dir Drehachse rechtwinklig zu den beiden anderen Kanten des Quaders > verläuft. Das zu drehende Objekt kann man sich als quadratisches "Kuchenblech" aus Alublech mit den Abmessungen BHT 500x500x20 vorstellen. Die Antriebsachse liegt im rechten Winkel genau im Zentrum der Fläche. Theor schrieb: > Verlängert man die Zeit bis zu Solldrehzahl auf etwa 3,333s (das ergibt > etwa ein Zehntel der Beschleunigung) so ergibt sich > M = 0,065 kg * m² * 1,884 rad/s² > M = 0,123 N * m > Das ist dann etwa ein NEMA 17 Motor. Das ist sehr interessant für mich! Die 3,333s bis zur Erreichung der Solldrehzahl kann ich gut einhalten und die Beschleunigungs/Bremsrampen vorsichtig fahren. Wenn ich das richtig verstehe macht es Sinn, alles mal versuchsweise mit einem NEMA 17 mit einem Haltemoment von 0.4 Nm aufzubauen. Durch den Platzgewinn steht noch Platz für ein zweites Gleitlager am Ende der Achse vor dem Befestigungsflansch zur Verfügung. Danke nochmals für die wertvollen Angaben
Arts S. schrieb: > herzlichen Dank für die umfassende und klärende Antwort! Bitteschön. > Die 3,333s bis zur Erreichung der Solldrehzahl kann ich gut einhalten > und > die Beschleunigungs/Bremsrampen vorsichtig fahren. Naja. Dann verlängert sich die Zeit natürlich. > Wenn ich das richtig verstehe macht es Sinn, alles mal versuchsweise mit > einem NEMA 17 mit einem Haltemoment von 0.4 Nm aufzubauen. Ich würde mich zwar nicht so ausdrücken, aber naja. Das ist sinnvoll. Ja :-) > Durch den > Platzgewinn steht noch Platz für ein zweites Gleitlager am Ende der > Achse vor dem Befestigungsflansch zur Verfügung. Das Ganze ist natürlich nur eine grobe Überschlagsrechnung. Die Trägheitsmomente des Rotors (einige 40gcm^2), die Masse der Befestigung des "Tabletts", dann noch die Lösemomente der Gleitlager, die Reibung etc. - aber mit 0,4Nm meine ich hast Du einiges an Reserve; auch für die Rampen. Du kannst ja mal spasseshalber und um die Schulmathekenntnisse etwas aufzufrischen diese Werte noch berücksichtigen. Also, viel Spaß.
...den Spass werde ich sicher haben. Die Resultate und das fertige Objekt werde ich natürlich zum Abschluss in dieses Super-Forum stellen. Das dauert aber noch eine Weile. Die Ausstellung beginnt erst im Herbst. Das mit dem Auffrischen meiner Mathekompetenz wird ziemlich aufwändig - das hat dann zuerst mal eher etwas mit Archeologie zu tun ;) LG Felix
Verd ... Jetzt ist mir doch noch was Wichtiges eingefallen: Schrittmotoren mögen meist keine großen axialen Belastungen. Ich habe hier z.B. für einen NEMA 17 Motor einer Angabe von 7 Newton. Das entspricht etwa 7N/9,81m/s² = 713g. Das ist weniger als die Hälfte Deiner Last! (Siehe: https://de.nanotec.com/produkte/250-st4118-schrittmotor-nema-17/# und dort das Datenblatt unter Axial force) Wenn Du also ohnehin Platz übrig hast, dann investiere ihn lieber in ein Axial-Lager als in ein Radiales. Radial wird der Motor, wenn ich das richtig verstehe, so gut wie gar nicht belastet.
Hallo ich lese gerne bei solchen Themen mit - vielleicht kann man selber mal was davon brauchen. Theor: Super Erklärung mit sehr gut verständlichen Beispiel, wo nicht nur einfach das Ergebnis hingeworfen oder davon ausgegangen das jeder Bescheid weiss wie das gerechnet bzw. eine Formel angepasst wird. Auch der Bezug zur Praxis, hier die Eigenschaften von "echten" leicht beschaffbaren Schrittmotoren, ist sehr gut. Nochmal vielen Dank von einen sehr interessierten Mitleser der von deinen Ausführungen sicherlich auch noch profitieren wird. Wäre mir die Mathematik direkt an solchen Beispielen aus der Praxis schon in der Schule (lang ist es her) beigebracht worden wäre mir so mancher "Ärger" und Verdruss, bis zur fast zur Frustration erspart geblieben - leider scheint sich auch noch fast 30 Jahren an der Lehrmethode in der Schule bezüglich der Mathematik wenig getan zu haben - kein Wunder das es für so viele ein total abstraktes und (scheinbar!) sinnloses Fach ist - die "Schönheit" und "Kraft" der Mathematik lernt man so, wenn überhaupt, erst viel später (für den beruflichen Weg oft zu spät) und mit viel mehr Aufwand kennen. Großes Daumen hoch. Jemand
Jemand schrieb: > Großes Daumen hoch. > Bingo! Besser kann man das nicht ausdrücken. Blumensträusse für Theor... Nun ist es an mir, etwas davon in anderen Foren zurückzugeben.
Ich bedanke mich für das Lob, meine aber, dass der überwiegende Teil der Leser hier, dass genauso gut hin bekommen hätten. ACHTUNG: Arts Sensor! Bitte unbedingt noch meinen Beitrag hier Beitrag "Re: Schrittmotor bestimmen: Trägheitsmoment & Drehmoment?" lesen! ACHTUNG!
...da habe ich offenbar etwas zu wenig genau dargelegt. Die Drehachse ist horizontal geführt. Das Bild dreht senkrecht, parallel zur Wand. Die Last wirkt etwa im rechten Winkel zur Achse. Bin gerade dabei ein ziemlich fettes Flanschlager (Radial) einzuzeichnen und Achse wird einen Durchmesser von 12mm haben. Das sollte eigentlich genügen?
Arts S. schrieb: > ...da habe ich offenbar etwas zu wenig genau dargelegt. Die Drehachse > ist horizontal geführt. Das Bild dreht senkrecht, Naja. Irgendwie "unklar", weil es an sich eine Konvention für die Sprechweise gibt. Man beschreibt das als "Drehung um eine horizontale Achse" und nichts weiter. OK. Ist ja nun "klar". > Bin gerade dabei ein ziemlich fettes Flanschlager (Radial) einzuzeichnen > und Achse wird einen Durchmesser von 12mm haben. Das sollte eigentlich > genügen? Ob und welches Lager notwendig ist, hängt davon ab, wie weit die Last vom Motor entfernt ist. In dem verlinkten Datenblatt hier https://de.nanotec.com/fileadmin/files/Datenblaetter/Schrittmotoren/ST4118/M/ST4118M0406-A.pdf steht etwa folgendes: Distanz (mm) 5 10 15 20 Radialkraft (N) 58 36 26 20 Radiallast (kg) 5,9 3,7 2,7 2,0 Das gilt, wenn die Last direkt an der Achse befestigt ist. Falls an der Motorachse eine weitere Achse befestigt ist, kommt deren Masse und die der Kupplung hinzu. Das zusätzliche Radiallager ist dann sicher nützlich. Wichtig ist, dass es relativ genau fluchtet, sonst belastet die Achsverlängerung dann doch wieder den Motor oder die Kupplung muss Winkel und Achsversatz aufnehmen können. Ein Flanschlager ist da eher ungünstig, weil letztlich die Schrauben auf Scherung beansprucht werden. Schrauben sind aber eher für Druck/Zug/Reibung auf den Zahnflanken geeignet. Also, am besten ein Stehlager und Stellschrauben vorsehen. Am besten Du machst mal eine Skizze in der Du die Entfernungen einträgst. Ausserdem wäre es gut die Masse der Achse selbst einschätzen zu können.
Naja. Das mit der Wirkung der Scherungsbelastung der Schrauben hängt dann auch davon ab, was für Schrauben das sind und welche Beschleunigungen und welche Massen beteiligt sind. Auch reiben ja die Unterseiten der Schraubenköpfe noch am Flansch. Jedenfalls: Irgendwas mit Durchmesser grösser als der Durchmesser der Achse geteilt durch die Anzahl der Schrauben sollte es tun. Vermutlich. Hängt auch davon ab, wie die Bewegungsabläufe genau sind. Man muss halt bedenken, dass auf die Befestigungsschrauben insgesamt immer die Gegenkraft wirkt. (Actio gleich Reactio). Und das auch in dynamischer Hinsicht. Am besten mal einfach eine Skizze mit allen bekannten Maßen und Gewichten machen. Dazu auch eine Beschreibung der geplanten Bewegungsabläufe. Damit man mal weiß in welche Richtung man denken muss.
Mit einem gewissen Augenmaß, einem Gefühl für Proportionen, - was ich einem Künstler mal ad hoc zutraue -, wirst Du das schon hin bekommen, denke ich. Halt keine Uhrenschrauben und Micro-Lager bei 1,5kg Last und Achsen mit 12mm Durchmesser.
...damit komme ich nochmal einen Schritt weiter. Stehlager: hab an soetwas gedacht: http://www.maedler.ch/product/1643/1629/840/kugel-stehlager-tucp-kunststoff-weiss-mit-edelstahllager
Arts S. schrieb: > Das zu drehende Objekt kann man sich als quadratisches "Kuchenblech" aus > Alublech mit den Abmessungen BHT 500x500x20 vorstellen. Bei 180/min wird das eine Menge Wind machen. Hast du auch an die dafür erforderliche Leistung gedacht?
Naja. Sieht schon mal nicht schlecht aus, dann aber zwei davon, an jedem Ende der Achse eines, weil Kugellager. Passt das zu dem Projekt? Gleitlager fand ich an sich eine gute Wahl. Da müsste man jetzt wirklich mal mehr Details und die Anwendungsbeschreibung kennen. Mache doch mal die Skizze. Da gibt es eine ganze Reihe von Faktoren, die teilweise auch widersprüchlich sind und die man wenigsten mal grob gegeneinander abwägen müsste. Muss ja nicht perfekt vollständig sein, aber so dass man sich was vorstellen kann, jedenfalls zwei oder drei Schritte weiterkommt. Z.B. Ein Problem bei Kugellagern sind Unwuchten. Willst Du da Aufwand reinstecken, zum auswuchten? Spielt aber keine so große Rolle wenn das Dings noch langsam dreht oder sehr selten oder insgesamt sehr kurze Zeit. Ausserdem mögen sie Lasten an sich garnicht so sehr. Gleitlager sind da eher gutmütig und für die geringen Drehzahlen auch etwas günstiger und dazu noch billiger. Aber dafür schlecht, falls selten gedreht wird. Du verstehst, was ich andeuten will?
...ups! Da gibts auch noch den Luftwiderstand einzubeziehen. Danke für diesen Hinweis. Alles deutet darauf hin, dass ich einen stärkeren Motor zulegen muss. Sehe gerade einen NEMA23 mit 5mm mehr Einbautiefe und dafür doppelt so viel Drehmoment, mit 1Nm. Werde nun in den kommenden Tagen/Wochen, wenn alles bestellte Material eingetroffen und die Teile hergestellt sind mit einem Versuchsaufbau alles mal austesten. Ich kann am besten mit dem realen Material weiterdenken.
Warum überhaupt ein Schrittmotor als Antrieb? Gerade bei so großem Drehzahlbereich ist die Ansteuerung nicht trivial. Hinzu kommt noch die Neigung von Schrittmotoren sich zu verstolpern, oder durch Eingriffe von aussen eine um N*4 Schritte falsche Position einzunehmen. Das hat eigentlich nur Sinn, wenn eine genaue Positionierung erforderlich ist, und diese auch überprüft werden kann. In den meisten Fällen erledigen gewöhnliche Gleichstrom- oder BLDC-Servomotore mit oder Strichscheibe das genauer und wirtschaftlicher. Arts S. schrieb: > wenn alles bestellte Material > eingetroffen und die Teile hergestellt sind mit einem Versuchsaufbau > alles mal austesten. Ich würde einfach eine Sperrholzplatte entsprechender Größe mit einer Achse verstehen und mit einer drehzahlregelbaren Handbohrmaschine auf die gewünschte Geschwindigkeit bringen. Ein Energiekostenmeßgerät kann dir die dafür benötigte Leistung -nach Abzug der Leerlaufleistung- anzeigen. Das ist sicher keine Präzisionsmessung, aber gibt zumindest einen Hinweis auf die benötigte Antriebsleistung. Sogar der endliche Wirkungsgrad des Antriebs wird dabei berücksichtigt.
Merci nachtmix...nie hätte ich gedacht, dass alles so komplex (aber interessant) wird. Zum guten Glück habe ich bis zur Ausstellung im Herbst noch Zeiit um alle diese Probleme auzukosten. Das kommt gut. Jetzt muss ich mich daran setzen, um die wertvollen Hinweise aus diesem Forum zu verdauen resp. zu überlegen wie ich nun am besten vorgehen soll. Der Hinweis mit dem Energiekostengerät macht Sinn und ist auch für mich verständlich und einfach umzusetzen.
Hp M. schrieb: > Das hat eigentlich nur Sinn, wenn eine genaue Positionierung > erforderlich ist, und diese auch überprüft werden kann. Ein Schrittmotor ermöglicht die genaue Drehzahlvorgabe. Die abs. Position ist hier ja nicht gefragt. > In den meisten Fällen erledigen gewöhnliche Gleichstrom- oder > BLDC-Servomotore mit oder Strichscheibe das genauer und > wirtschaftlicher. Bei einem DC-(Getriebe-)Motor muß man auf den Drehzahlbereich achten, insbesondere, wie langsam er noch ruhig laufen kann. Andererseits ist die zu drehende Masse so groß und die Bewegung so langsam, daß das egal sein könnte. Ein BLDC-Motor dürfte hier die besten Eigenschaften haben. Falls es am Ende doch ein Schrittmotor sein soll, würde ich darauf achten, die Achse durch einen Antriebsriemen akustisch vom Objekt (Bild) zu entkoppeln und ihn selber vibrationsarm zu befestigen. Andernfalls könnte er bei Resonanzen sehr nervig werden.
Arts S. schrieb: > ... > - Beschleunigungs/Bremsrampen sind vor/nach jeder > Geschwindigkeitsveränderung gut möglich Vor/nach einer Geschwindigkeitsänderung ist die Geschwindigkeit konstant. Da haben Rampen nichts zu suchen. Die Rampen brauchst du während einer Geschwindigkeitsänderung, i.e. du änderst die Schrittfrequenz nicht schlagartig, sondernd streckst die Frequenzänderung zeitlich auf einen passenden Zeitraum. Beim Antrieb ist es sicher vorteilhaft, mit Mikroschrittbetrieb zu arbeiten.
Danke Wolfgang für die Präzisierung. Da hast Du natürlich völlig recht. So habe ich es eigentlich gemeint und im Arduino-Code auch so geschrieben.
Hp M. schrieb im Beitrag: > Das hat eigentlich nur Sinn, wenn eine genaue Positionierung > erforderlich ist, und diese auch überprüft werden kann. > In den meisten Fällen erledigen gewöhnliche Gleichstrom- oder > BLDC-Servomotore mit oder Strichscheibe das genauer und > wirtschaftlicher. @Hp.M & m.n. Zur Präzisierung: Mein Objekt ist ja keine Werkzeugmaschine. Ich brauche nur eine "präzise" Position: Das Bild muss eine Nullposition, resp. die ober Bildkante muss optisch die genaue Waagerechte anfahren können. Ich werde das mit einem Hallsensor probieren. Die weiteren Positionen müssen nur ungefähr erreicht werden können. Mein Problem: Für Schrittmotoren und entsprechende Treiber sind mir Arduino-Codes ziemlich bekannt. Die Steuerung von BLDC-Servomotoren ist mir jedoch noch fremd.
Arts S. schrieb: > Das Bild muss eine Nullposition, resp. die > ober Bildkante muss optisch die genaue Waagerechte anfahren können. Ich > werde das mit einem Hallsensor probieren. Die weiteren Positionen müssen > nur ungefähr erreicht werden können. Hattest Du das schon vorher erwähnt? Mittlerweile verstehe ich garnichts mehr. Hl. Geist + Pfingsten bringt es wohl doch nicht.
Arts S. schrieb: > Die weiteren Positionen müssen nur ungefähr erreicht werden können. Ein Schrittmotor (ohne Encoder) kennt eigentlich kein "ungefähr erreichen". Entweder er steht richtig oder er baut bei zu hoher Last richtigen Bockmist.
@ m.n. & Wolfgang Nein, meine Nullposition habe ich nicht erwähnt (Pardon). Ohne diese Information nütz auch der heilige Pfingstgeist tatsächlich nichts ;) Die Nullposition sollte mit einem Hallsensor zu bestimmen sein. Das werde ich beim austesten genauer feststellen. Die anderen "ungenauen" Positionen dürfen ruhig auch unzuverlässig sein. Es geht dabei sozusagen ausschliesslich um eine visuellen Bild-Effekt.
Angehängte Dateien:
-

Aufbau_xxx.png
170 KB
{kind=link}
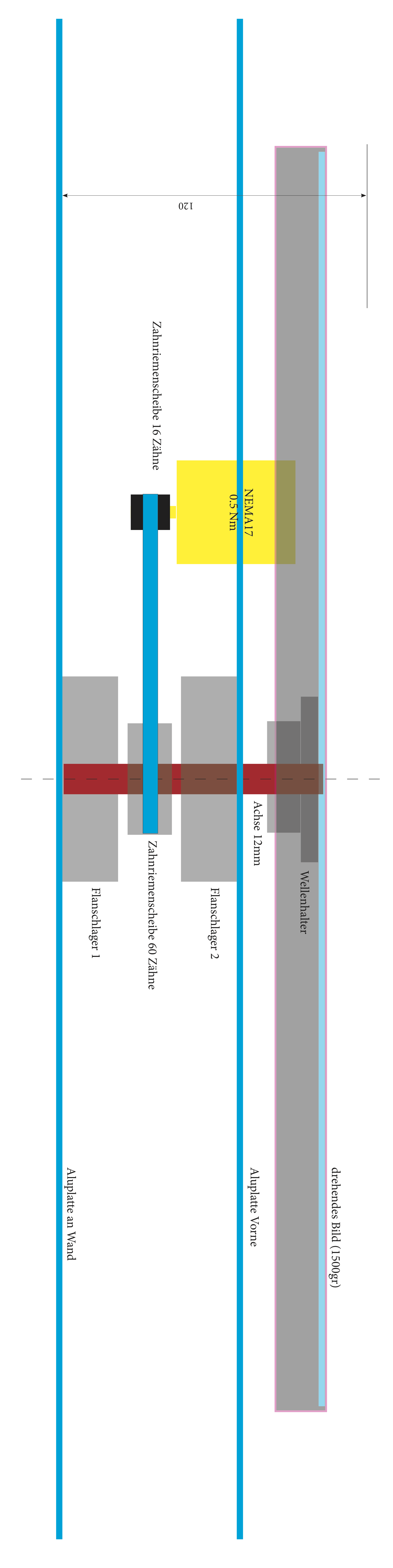
Hallo zusammen unter Abwägung aller Diskussionsbeiträge, bin ich zu folgender Konstruktion gelangt (siehe Anhang). Meine anfängliche Wunschlösung, das Bild direkt mit dem Schrittmotor anzutreiben ist aus Stabilitäts- und Platzgründen nicht sinnvoll umzusetzen. Die Lösung mit einer Zahnriemenübersetzung und zwei Flanschlager konnte ich nun in den vorhandenen Platz unterbringen. Durch das Übersetzungsverhältnis kann die benötigte Kraft erreicht werden. Herzlichen Dank an alle Beitragenden für Ihr Mitdenken! Gerne werde ich das endgültig gebaute Objekt hier ins Forum stellen. LG Felix
Einige Punkte wurden bereits angesprochen, welche nicht zu unterschätzen sind: - Geräuschentwicklung durch die Schrittfrequenz (Motor von der Platte entkoppeln) - Resonanzen bei bestimmten Geschwindigkeiten - ausreichend hohe Versorgungsspannung - Eisenverluste Motordrehzahl: 180*60/16=675 rpm, das sind 4500 Hz Halbschritt 0,9° Ich würde da eher zu einem (BL)DC-Winkelgetriebemotor tendieren. Ich dachte mittendrin auch, dass das Bild als Ventilator wirkt, aber so wie es gezeichnet ist, hält sich der Luftwiderstand in Grenzen. Eine frühe Skizze wäre hilfreich gewesen.
Hallo eProfi danke für Deine Hinweise. Zur Geräuschentwicklung: Gerne würde ich die Schrittfrquenz als musikalische Komponente nutzen. So könnte auch eine Melodie abgespielt werden. Siehe: https://www.youtube.com/watch?v=2Fpk5h_Yit4 und http://www.schrittmotor-blog.de/resonanzen-mal-anders-musizieren-mit-schrittmotoren/ Nun versuche ich das mal mit dem NEMA17. DC-Winkelgetriebemotoren habe ich mir angeschaut. Schöne aber kostspielige Sache. Wie gesagt, meine Kenntnisse im Bereich Steuerung reichen nur bis und mit der Anwendung von Arduino-Codes. Ja eine frühe Skizze wäre sinnvoll gewesen.
Anbei noch das Schema Steuerung, Sensoren, etc zu meinem Objekt
Hey! Denk dran dass Zahnriemen es mögen wenn ihre beiden Achsen möglichst parallel zueinander liegen. Daher würde ich keine Flanschlager nehmen, sondern normale Kugellager. Wenn du eine CNC Fräse hast kannst du recht einfach einen Lagersitz ins Holz fräsen, mit einem Lasercutter sollte das mit ein wenig ausprobieren auch gehen. Ansonsten denk an Details wie Stellringe zum fixieren der Welle und der Welle-Nabe Verbindung im allgemeinen. Also wie willst du das Riemenrad festmachen, sowohl am Motor als auch an der Achse. Es wirkt so als wäre das ein Kunsthochschul Projekt. Hab ihr einen Werkstatt mit Drehbank? Geh mal hin und frag nach Reibahlen. Damit kannst du deine Riemenräder sehr genau auf Maß bringen. Ansonsten brauchst du eventuell nicht zwei Netzteile, für deine Anwendung sind die 12V (?) für die LED-Streifen ausreichend. Ich würde ausserdem kein SSR vor dem Netzteil nehmen (230V~foo) sondern einfach ein MOSFET über den Arduino betreiben.Dann kannst du diese sogar dimmen (PWM) Drei Netzteil für Dinge die alle mit der gleichen Spannung arbeiten ist technisch Unsinnig. Und JA dein Motörchen mag mit 24V etwas mehr Drehmoment haben, aber aus eigener Erfahrung kann ich sagen dass das eher zu vernachlässigen ist. Gruss A.B
Ach noch was. Bei deiner Drehzahl und der Untersetzung dreht dein Motörchen bei ca 700~ U/min. Da geht die Drehzahl auf über 1/3 des Nennmoments runter. Schau mal bei Nanotec auf der Homepage, da gibt es für jeden Motor eine Kennlinie. Grundsätzlich ist eine Untersetzung gut da es das Trägheitsmoment deiner Kunst im Quadrat reduziert. http://institute.unileoben.ac.at/etechnik/Ger/Lehre_G/Skripten_G/Files_G/El_Antriebst/D_Getriebe_Tragheitsmoment.pdf Es gibt viele Möglichkeiten: Motor mit mehr Drehmoment, geringere Übersetzung.. usw. Mach doch eine Excel Tabelle die alle Dinge berücksichtigt und dir eine flexible Berechnung erlaubt. Ansonsten würde ich auch überlegen einen DC Motor zu nehmen. Bei https://www.pololu.com gibt es DC-Motortreiber die über UART direkt mit dem Arduino zu betreiben sind. Da musst du dir über die H-Brücke usw. keine Gedanken mehr machen. Du kannst dann einfach eine Rampe programmieren und bei einer sehr geringen Geschwindigkeit soll der Treiber genau dann die Bremse reinhauen wenn der Hallsensor die richtige Position durchgibt. Das sind nur ein paar Zeilen code. Ein Schrittmotor kann je nach Steuerung schon sehr nervige Töne von sich geben, das Problem hättest du dann schon mal nicht mehr.
Hallo A.B. Danke für Deine Beiträge. Ich bin gerade unterwegs und werde mir das morgen genauer anschauen können. LG F
Habe Deine Anregungen mit dem aktuellen Zwischenstand meines Projektes verglichen. Es schaut nun gut aus. A. B. schrieb: > Daher würde ich keine Flanschlager nehmen, sondern normale Kugellager. - Die vorgesehenen Flanschlager haben Kugellager sowie eine Schraube zum Fixieren der Achse: http://www.maedler.ch/Article/62641200 A. B. schrieb: > Ich würde ausserdem kein SSR vor dem Netzteil nehmen. Ich gehe noch weiter zurück in die Vergangenheit ;) und werde ein möglichst laut klickendes Kammrelais nehmen. A. B. schrieb: > Drei Netzteil für Dinge die alle mit der gleichen Spannung arbeiten ist technisch Unsinnig. Ich werde ein Netzteil mit zwei Ausgangsspannungen 24V (Motor) & 12V (Arduino) einsetzen. A. B. schrieb: > Da geht die Drehzahl auf über 1/3 des Nennmoments runter. Mein Schrittmotörchen mit 0.5Nm bleibt wie geplant (vorhandener Platz). Hingegen habe ich das Gewicht des drehenden Bildes auf gut unter 500 Gramm reduzieren können. Ich werde dieses aus leichten Kunststoffplattenmaterial bauen. A. B. schrieb: > Ein Schrittmotor kann je nach Steuerung schon sehr nervige Töne von sich geben, Genau diese Töne will ich... Arts S. schrieb: > Zur Geräuschentwicklung: Gerne würde ich die Schrittfrquenz als > musikalische Komponente nutzen. So könnte auch eine Melodie abgespielt > werden. Siehe: > Youtube-Video "Stepper motor music vs Depeche mode" > und > http://www.schrittmotor-blog.de/resonanzen-mal-anders-musizieren-mit-schrittmotoren/ Nun warte ich auf das bestellte Material und werde diese Version mal Aufbauen. Bericht über die finale Umsetzung folgt... LG F
Moin! Zitat Maedler: "Der Lagereinsatz kann im Gehäuse geschwenkt werden, um Fluchtungsfehler bei der Montage auszugleichen" Da ist das "Problem" du wirst die Achse mit den Flanschlagern nicht so einfach parallel zur Motorachse ausrichten können. Wenn du deine Mechanik halbwegs genau fertigen kannst (Laser,CNC..) musst du keine Toleranzen ausgleichen. Naja und mit dem Ton.. wie du magst. Hast du eine Einzelausstellung? Wenn ja -gut. Wenn nicht werden die anderen Teilnehmer der Ausstellung nicht erfreut sein ;) Ich kenne deine Arbeit nicht... aber ob die auditive Ebene hier wirklich notwendig ist weiß ich nicht. Klingt eher nach dem Motto "viel hilft viel"
na, dann schauen wir mal :) Ich werde die visuelle, kynetische und auditive Ebene dramaturgisch so in ein Ganzes zusammenbringen dass es passt. Danke fürs Mitdenken LG F
Wie versprochen poste ich hier den Link zum fertigen & ausgestellten Objekt: https://arts.ch/bild/ Die Ausstellung wurde am vergangenen Freitag eröffnet. Die engagierten Beiträge in diesem Forum haben mir sehr geholfen. Nochmals besten Dank dafür. Das Zusammenspiel der Steuerlogik (Arduino) mit 4 Hallsensoren, den akustischen Komponenten, der Steuerung der internen LED-Beleuchtung und dem externen Spot, etc. klappt gut. Die definitve Umsetzung musste ich aus Platz- und Kostengründen mit einem DC-Motor mit Winkelgetriebe lösen. Diese Getriebeart führt zu einem mechanischen Spiel zwischen der Getriebeschnecke und dem Zahnrad. Dadurch konnte die Genauigkeit bezüglich Positionierung des Bildes nur teilweise befriedigen. Ich habe mich entschlossen, ein nächstes Projekt mittels Schrittmotor, Getriebe ohne Spiel und integrierter Positionserkennung anzugehen. Mal schauen, wie weit ich komme ;) Gruss Félix
Hey cool dass es geklappt hat und schön zu sehen dass (manchmal) hier auch Vorhaben umgesetzt werden.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.