Hallo zusammen, ich interessiere mich für das System in http://ctms.engin.umich.edu/CTMS/index.php?example=Suspension§ion=SimulinkModeling allerdings ohne K2 und b2. Angenommen die Masse M2 wird Angeregt (x2) wie sieht dann die Kraft u aus unter der Annahme es ist ein Linearmotor zwischen den Massen der mechanisch starr gekoppelt ist. Die Bewgungsgleichungen sind: M1*x1dd = K1*(x2-x1) + b1*(x2d-x1d)+u M2*x2dd = -K1*(x2-x1) - b1*(x2d-x1d)-u Aber wie sieht u nun aus? Es müsste doch gelten u = f(x, us) (Funktion der Zustandsgrößen und der Spannung. Sofern der Motor nicht mit beiden Massen verbunden wäre (starr) könnte ich für einen einfachen Skyhook die Kraft u = - x1d*K_sky vorgeben (Regelung der Kraft). Aber wie ist dass wenn er mit beiden Massen verbuden ist? die Kraft wird dann reduziert? d bedeutet Ableitung dd bedeutet Beschleunigung Danke und Gruß, Leonie
Ich versuche mal deine Frage zu übersetzen. Du hast zwei Massen, welche über einen Voigt-Kelvin-Körper miteinander gekoppelt sind. Es existiert keine Verbindung zum Fundament. Weiterhin befindet sich zwischen beiden Massen ein Linearaktor. An einer der beiden Massen (m2) wirkt eine Wegerregung an. Alle Kräfte greifen nur an den jeweiligen Schwerpunkten der Einzelmassen an. Wie groß ist die Kraft im Linearaktor? Habe ich das richtig verstanden?
Joe G. schrieb: > Ich versuche mal deine Frage zu übersetzen. > Du hast zwei Massen, welche über einen Voigt-Kelvin-Körper miteinander > gekoppelt sind. Es existiert keine Verbindung zum Fundament. Weiterhin > befindet sich zwischen beiden Massen ein Linearaktor. > An einer der beiden Massen (m2) wirkt eine Wegerregung an. Alle Kräfte > greifen nur an den jeweiligen Schwerpunkten der Einzelmassen an. Wie > groß ist die Kraft im Linearaktor? > > Habe ich das richtig verstanden? Ja exakt!
StarLord schrieb: > Eine Zeichnung, was du meinst, wäre hilfreich. Siehe Link. Anstelle der Pfeile beim u nehme einen Linearaktor und schraube gedanklich den einen Teil (Stator oder Läufer) an die obere und den anderen Teil an die untere Masse.
Angehängte Dateien:
-

20170622_105955.jpg
230 KB
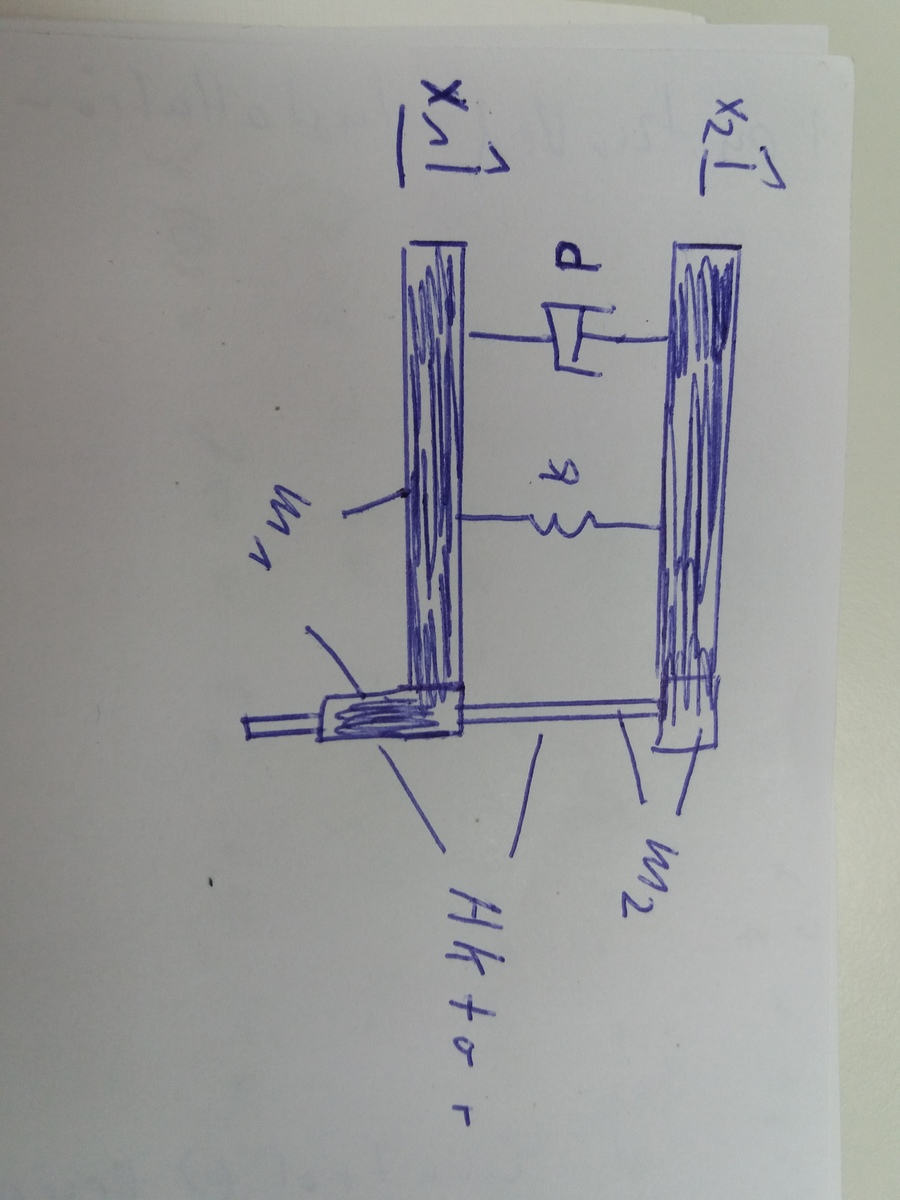
Also ich habe es jetzt mal skizziert, um zu sehen wie es gemeint ist
einfach Dgl-System aufstellen
Joe G. schrieb: > einfach Dgl-System aufstellen Was soll den die exterene Erregekraft sein? Ich habe ne Weganregung. Ist das nicht schon mit m1*x1dd berücksichtigt? Also die zweite Ableitung der Weganregung mal die Masse ist die Erregerkraft? und Somit gleichzeitig die Kraft mit der sich Masse m1 bewegt?
Leonie Weber schrieb: > Was soll den die exterene Erregekraft sein? Ich habe ne Weganregung. Die Weganregung ist eine externe Erregergröße. Sie kann als Weg an einer zusätzlichen Feder realisiert werden. Ansonsten gibt es noch die Geschwindigkeitsanregung, die Unwuchterregung oder die direkte Krafterregung. Einfach mal über Erregermöglichkeiten am Einmassenschwinger informieren.
Joe G. schrieb: > Leonie Weber schrieb: >> Was soll den die exterene Erregekraft sein? Ich habe ne Weganregung. > > Die Weganregung ist eine externe Erregergröße. Sie kann als Weg an einer > zusätzlichen Feder realisiert werden. Ansonsten gibt es noch die > Geschwindigkeitsanregung, die Unwuchterregung oder die direkte > Krafterregung. Einfach mal über Erregermöglichkeiten am > Einmassenschwinger informieren. Dann müsste ja auch ein getrenntes Koordinatensystem für die Erregerkraft herrschen... Dies ist aber nicht der Fall, die Masse wird direkt ohne Feder o. ä. angeregt. x1 ist die Bewegung der unteren Masse infolge einer Anregung x1(t). Die Ableitung der Ableitung von x1 also x1dd multipliziert mit der Masse an der die Erregung wirkt ist mMn die Erregerkraft. Oder was verstehe ich falsch?
Leonie Weber schrieb: > Oder was verstehe ich falsch? Ja, laut Impulssatz der Mechanik mußt du alle äußeren Kräfte ins Gleichgewicht mit der Trägheistkraft bringen. Dazu gehören: - Federkräfte - Dämpferkräfte - Zwangskräfte - weitere externe Kräfte wie zusätzliche Erregerkräfte Die Wegweregung wäre eine zusätzliche Erregerkrfat über eine externe Feder. Existiert diese nicht, gibt es keine wegerregung. Dann hast du im Dgl.System nur deine Kraft durch den Liearmotor.
Joe G. schrieb: > Leonie Weber schrieb: >> Oder was verstehe ich falsch? > > Ja, laut Impulssatz der Mechanik mußt du alle äußeren Kräfte ins > Gleichgewicht mit der Trägheistkraft bringen. > Dazu gehören: > - Federkräfte > - Dämpferkräfte > - Zwangskräfte > - weitere externe Kräfte wie zusätzliche Erregerkräfte > Die Wegweregung wäre eine zusätzliche Erregerkrfat über eine externe > Feder. Existiert diese nicht, gibt es keine wegerregung. Dann hast du im > Dgl.System nur deine Kraft durch den Liearmotor. Und wenn ich ne Hydraulik o.ä habe die starr mit m1 verbunden ist und diese Bewegung x1 ins System einprägt?
Machen wir folgendes Gedankenexperiment. Aus der Skizze. Stelle dir einen vertikalen Pneumatikzylinder vor, dessen Schieber ich starr mit der unteren Masse m1 verbunden habe. Der Luftdruck im Zylinder sei zufällig, das bedeutet die Masse bewegt sich zufällig beschrieben mit x1. Durch den Dämpfer und die Feder und Gravitation wird die Bewegung x1 beeinflusst.
Leonie Weber schrieb: > Und wenn ich ne Hydraulik o.ä habe die starr mit m1 verbunden ist und > diese Bewegung x1 ins System einprägt? Dann habe ich eine direkte Krafterregung
Leonie Weber schrieb: > Der Luftdruck im Zylinder sei > zufällig, das bedeutet die Masse bewegt sich zufällig beschrieben mit > x1. Dann habe ich eine stochastische Kraftanregung
Joe G. schrieb: > Leonie Weber schrieb: >> Und wenn ich ne Hydraulik o.ä habe die starr mit m1 verbunden ist und >> diese Bewegung x1 ins System einprägt? > > Dann habe ich eine direkte Krafterregung Verstehe immer noch nicht wo der Unterschied zwischen Masse mal Beschleunigung und der Erregerkraft sein soll. Weil beide ja den selben Koordinatensystem folgen. x1 ist die Anregung, die wie auch immer ins System kommt, durch diese Anregung wird die Masse m1 mit x1dd beschleunigt. Multipliziert mit der Masse habe ich die erregung m1*x1dd. Wie sieht Fe sonst aus? Fe muss ja eine Funktion von x1 sein Fe = f(x1).
Leonie Weber schrieb: > Verstehe immer noch nicht wo der Unterschied zwischen Masse mal > Beschleunigung und der Erregerkraft sein soll. Masse*Beschleunigung ist die Trägheitskraft - eine Systemeigenschaft der Masse. Die Erregerkraft ist irgendeine äußere zusätzliche Kraft.
Vielleicht liest du erstmal... https://www.thm.de/me/images/user/kolling-94/schwingungslehre/Schwingungen.pdf ab Seite 50
Beitrag #5051144 wurde von einem Moderator gelöscht.
Beide Fälle sind identisch. Im Fall 1 muss die Wand die Kraft aufnehmen um die Position zu halten, im Fall 2 muss deine Hand die Kraft aufnehmen um die Position zu halten.
Beitrag #5051175 wurde von einem Moderator gelöscht.
Leonie Weber schrieb im Beitrag #5051175:
> Jetzt will ich mit dem Motor die "lose" Seite ruhighalten.
Diese Aufgabe ist simpel. Der Motor muss genau die Feder- und
Dämpferkraft kompensieren.
Beitrag #5051257 wurde von einem Moderator gelöscht.
Beitrag #5051263 wurde von einem Moderator gelöscht.
Beitrag #5051276 wurde von einem Moderator gelöscht.
Beitrag #5051280 wurde von einem Moderator gelöscht.
Beitrag #5051297 wurde von einem Moderator gelöscht.
Beitrag #5051320 wurde von einem Moderator gelöscht.
Beitrag #5051324 wurde von einem Moderator gelöscht.
Beitrag #5051327 wurde von einem Moderator gelöscht.
Beitrag #5051330 wurde von einem Moderator gelöscht.
Beitrag #5051339 wurde von einem Moderator gelöscht.
Beitrag #5051347 wurde von einem Moderator gelöscht.
Beitrag #5051351 wurde von einem Moderator gelöscht.
Beitrag #5051356 wurde von einem Moderator gelöscht.
Beitrag #5051361 wurde von einem Moderator gelöscht.
Beitrag #5051419 wurde von einem Moderator gelöscht.
Beitrag #5051429 wurde von einem Moderator gelöscht.
Beitrag #5051473 wurde von einem Moderator gelöscht.
Beitrag #5051482 wurde von einem Moderator gelöscht.
Beitrag #5051508 wurde von einem Moderator gelöscht.
Beitrag #5051614 wurde von einem Moderator gelöscht.
Beitrag #5051622 wurde von einem Moderator gelöscht.
Macht aber einen Unterschied, ob man es statisch oder dynamisch betrachtet.
Ein externe Anregung kommt als inhomogene Loesung der DGL ins spiel. Die homogene Loesung ist etwas wie a d^/dt^2 x + b d/dt x + c =0 die inhomogene Loesung ist dann noch a d^/dt^2 x + b d/dt x + c = irgendwas Ja, alles noch in einem Koordinatensystem, welches nicht kartesisch sein muss. Rotationssysteme laesst man in einem polaren -, oder zylindrischen Koordinatensystem.
Solche Sachen gibt es eigentlich in den Büchern der Technischen Mechanik beschrieben. Bis ins Detail.
Joe G. schrieb: > Leonie Weber schrieb im Beitrag #5051175: >> Jetzt will ich mit dem Motor die "lose" Seite ruhighalten. > > Diese Aufgabe ist simpel. Der Motor muss genau die Feder- und > Dämpferkraft kompensieren. Aha, und eine N.B ist wohl n = const!
Cha-woma M. schrieb: > Mann, geht`s noch! Was möchte uns der Künstler damit sagen? Cha-woma M. schrieb: > Aha, und eine N.B ist wohl n = const! Ich verstehe Deine Frage nicht. Würdest Du sie bitte im Kontext der ursprünglichen Aufgabenstellung nochmals formulieren?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.