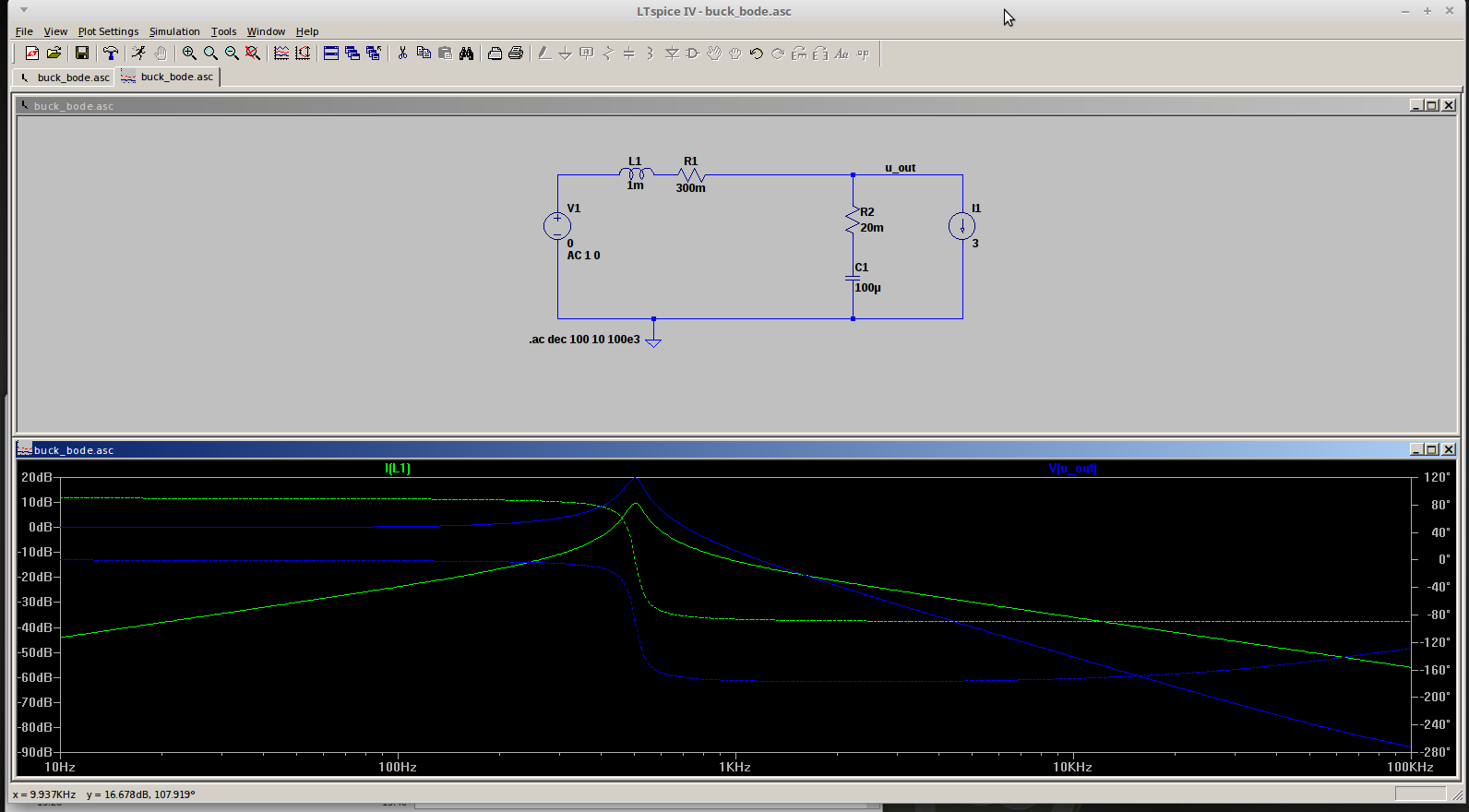
Hallo, ich will den Strom durch die Induktivität eines Buck-Konverters regeln. Nicht die Spannung am Ausgang (das wäre dann erst der zweite Schritt in einer weiter außen liegenden Regelschleife, und es wird abwechseln auf einen konstanten Strom auf eine konstante Spannung geregelt. Im zweiten Fall kommt dann der Strom-Sollwert aus einer übergeordneten Regelschleife, im ersten Fall ist der Sollwert einfach eine Konstante). Die Regelung soll einen Sollwert bekommen und den mittleren Strom durch die Induktivität möglichst schnell und ohne großen Überschwinger dahin bewegen. Der Übergang lückender zu kontinuierlichem Betrieb soll auch gemeistert werden, wobei die Regelgeschwindigkeit nur im kontinuierlichem Betrieb wichtig ist. Stellgröße ist das duty cycle, ADC für den Strom hab ich. Regelung ist in Software. Im kontinuierlichem Betrieb ist der Schalter recht gut modelliert als Spannungsquelle der Spannung U_in*duty_cyle, deswegen im Spice so modelliert. Aber ich habe gerade keine Idee wie man die Regelung aufbauen könnte. In der Literatur wird i.A. nur beschrieben wie man die Spannung regelt: Ein Integrator (Pol bei f=0), dann die Cross-over-Frequenz als das 5-fach der LC-Resonanzfrequenz wählen (darauf achten dass das dann max bei 20% der Schaltfrequenz liegt). Dann ein oder zwei Nullstellen unterhalb der Cross-over-Frequenz und die selbe Zahl Pole oberhalb positionieren, je nach dem wie viel man die Phase nach oben biegen muss um genügend Phasenreserve zu haben. An sich könnte ich das selbe machen, nur mit einem zweiten Pol bei f=0, dann habe ich ja das selbe verhalten, aber es heißt in der Literatur dass I-Anteile die Regelung langsam machen, und dass zwei I-Anteile hintereinander nie eine gute Idee sind. Außerdem wäre die Geschwindigkeit der Regelung die gleiche wie bei der Spannungsregelung. Gefühlt sollte der Strom wesentlich schneller und besser zu regeln sein als die Spannung, weil diese ja eine Ableitung des Stroms ist. Der hohe Peak bei der Resonanzfrequenz ist auch so ein Thema. Der Peak bleibt da weil die Last keine Resistive ist, und deswegen nicht zur Dämpfung beiträgt. Was ist eure Idee wie man diese Regelschleife konstruiert?
Angehängte Dateien:
-

buck_bode.png
53 KB
asd schrieb: > und den mittleren Strom durch > die Induktivität möglichst schnell und ohne großen Überschwinger dahin > bewegen. Diese Anforderung bedeutet: Zweipunktregler.
voltwide schrieb: > Eine andere Möglichkeit: current mode statt voltage mode. Wären denn die Anforderungen bei Voltage Mode überhaupt zu erfüllen? Ich dachte bei Voltage Mode geht´s allein um die (sowas wie VFF "ausgelassen") Ausgangspannung. Sinkt diese zu weit, wird bei PWM die Pulsbreite erhöht, bei Constant-On-Time die Frequenz nach oben, bei Constant-Off-Time nach unten gefahren, Ergebnis vergleichbar ---> Duty-Cycle steigt, Ausgangsspannung auch...
Hi, es mehrere Verfahren zur Regelung vom Buck Konverter - zwei weit verbreitete davon heißen: - Voltage mode control - Current mode control Beim Voltage mode control wird die Ausgangsspannung direkt in ein Duty Cycle umgewandelt. Heißt also, für eine höhere Ausgangsspannung wird direkt ein höheres Duty Cycle eingestellt und umgekehrt. In der Kleinsignalanalyse hat man entsprechend: Ûout/DutyCycle = Übertragungsfunktion Beim Current mode control wird die Ausgangsspannung in eine Spannung umgewandelt, die dem Sollstrom durch die Spule entspricht. Dieser Sollstrom wird dann mit dem Spulenstrom verglichen und über das Duty Cycle geregelt wird. In der Kleinsignalanalyse hat man entsprechend: ÎL/DutyCycle = Übertragungsfunktion Vorteile im Current mode control ist, dass die Übertragungsfunktion ein System 1. Ordnung ist. Das erleichtert die Reglerauslegung. Beim Voltage mode control ist die Übertragungsfunktion ein System 2. Ordnung, weshalb ein komplexerer Regler verwendet wird. Nachteil im Current mode control ist, dass es eine kaskadierte Regelschleife wird, da die Spannung erstmal in einen äquivalenten Strom umgewandelt wird. Viel Erfolg,
Al3ko -. schrieb: > Beim Voltage mode control wird die Ausgangsspannung direkt in ein Duty > Cycle umgewandelt. Heißt also, für eine höhere Ausgangsspannung wird > direkt ein höheres Duty Cycle eingestellt und umgekehrt. Ja, so ist der eigentliche Zusammenhang. Da war ich ein wenig voll daneben. (Übrigens schön verständlich erklärt. Danke! ;-) Hoffentlich geht´s beim TO auch weiter.
> Vorteile im Current mode control ist, dass die Übertragungsfunktion ein > System 1. Ordnung ist. Das erleichtert die Reglerauslegung. Wenn ich die Spice Simulation im ersten Post ansehe, dann ist die Übertragungsfunktion vom Duty Cycle zum Strom doch auch 2.Ordnung? Es gibt auch eine Phasenverschiebung von 180° wenn man ober- und unterhalb der Resonanzfrequenz vergleicht? Oder wie ist das mit der 1.Ordnung gemeint? Und das mit der Reglerauslegung: Kannst du eine Appnote o.ä. empfehlen? Eine Richtlinie wie man das für den Voltage Mode macht hab ich gefunden, jedoch nicht für den current mode. Leider erschließt sich mir das nicht von selber.
asd schrieb: > Wenn ich die Spice Simulation im ersten Post ansehe, dann ist die > Übertragungsfunktion vom Duty Cycle zum Strom doch auch 2.Ordnung? Es > gibt auch eine Phasenverschiebung von 180° wenn man ober- und unterhalb > der Resonanzfrequenz vergleicht? Oder wie ist das mit der 1.Ordnung > gemeint? Der Trick beim Current mode control ist, dass die Spule am Ausgang des Buck Konverters eine Konstantstromquelle wird. Somit brauchst du das L nicht mehr in deiner Übertragungsfunktion zu berücksichtigen, und hast nur noch deinen Ausgangselko und deiner Last übrig. > Und das mit der Reglerauslegung: Kannst du eine Appnote o.ä. empfehlen? > Eine Richtlinie wie man das für den Voltage Mode macht hab ich gefunden, > jedoch nicht für den current mode. Leider erschließt sich mir das nicht > von selber. Da du auch von ADC sprichst, gehe ich davon aus, dass du eine digitale Regelung implementieren willst. Dann würde ich auch gleich auf die richtige Literatur zurückgreifen: http://www.ti.com/lit/an/sprabe7a/sprabe7a.pdf "Digital Peak Current Mode Control With Slope Compensation Using the TMS320F2803x" Cheers,
> Der Trick beim Current mode control ist, dass die Spule am Ausgang des > Buck Konverters eine Konstantstromquelle wird. Ich verstehe: Die Übertragungsfunktion I_soll zum Durchschnittsstrom durch die Spule wird eine Funktion 1.Ordnung, erst nachdem man die Regelschleife geschlossen hat. > Da du auch von ADC sprichst, gehe ich davon aus, dass du eine digitale > Regelung implementieren willst. > Dann würde ich auch gleich auf die richtige Literatur zurückgreifen: > http://www.ti.com/lit/an/sprabe7a/sprabe7a.pdf Peak current control geht bei mir leider nicht, weil ich nur einen ADC-Wert pro Schaltperiode bekomme, der liefert den durchschnittlichen Strom (Delta-Sigma-ADC mit einer Datenrate gleich der Schaltfrequenz). Ist das so eine unübliche oder ungünstige Konstellation dass es dazu gar keine Literatur gibt?
asd schrieb: > Peak current control geht bei mir leider nicht, weil ich nur einen > ADC-Wert pro Schaltperiode bekomme, der liefert den durchschnittlichen > Strom (Delta-Sigma-ADC mit einer Datenrate gleich der Schaltfrequenz). > Ist das so eine unübliche oder ungünstige Konstellation dass es dazu gar > keine Literatur gibt? Gar kein Problem. Es gibt auch Average Current Mode control. Die Gleichungen, wenn ich mich recht entsinne, bleiben die gleichen. Mein Tipp: Lies dich in die Materie ein, wie man die Übertragungsfunktion für Current mode control bekommt. Das wird dann ein System 1. Ordnung. Dort würde ich dann einfach einen diskreten PI Regler implementieren. Wenn das Störverhalten nicht gut genug ist, würde ich ggf. auf einen 2P2Z Regler übergehen (2P2Z ist die Äquivalenz zum Type II Compensator). Auslegung sollte wie im ersten Link geschehen. Viel Erfolg Cheers,
Vielen Dank für die Tipps. Ein simpler PI Regler liefert bereits ein brauchbares Zeitverhalten.
Angehängte Dateien:
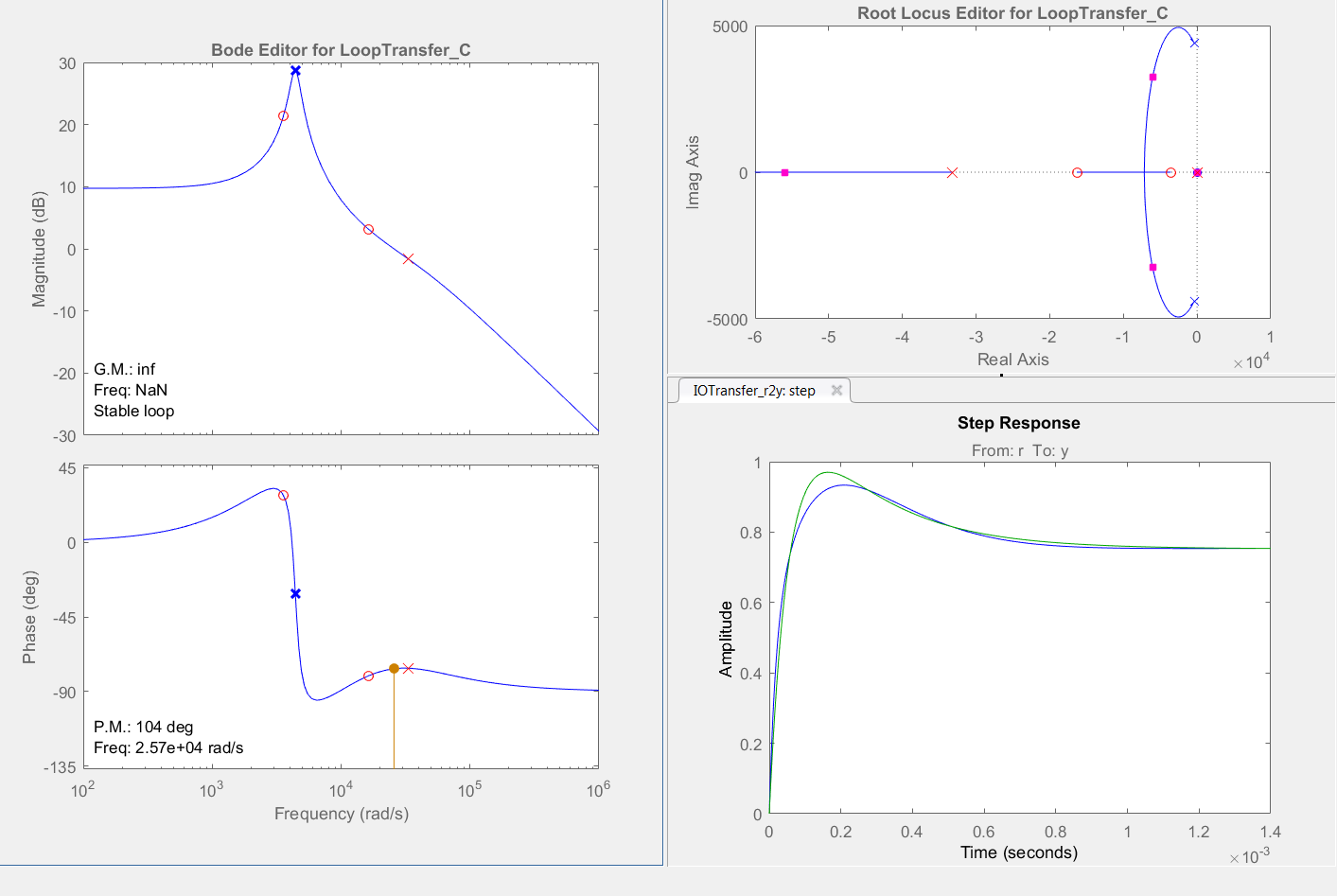
Doch nochmal eine Frage: Hier ist der Regler den ich design habe: PI mit der Null bei ca 3000 1/rad (die linke Null), dann noch ein Phase lead um die Cross-Over Frequenz bei knapp 30000 1/rad herum. Links ist das Bode-Diagramm des offenen Regelkreis dargestellt. Die Resonanz bei 4000 1/rad ist der L/C-Schwingkreis des Buck-Konverters. Zeitverhalten (rechts unten): blau: Regler wie oben beschrieben grün: nur der PI-Regler (Null bei 3000 1/rad), ohne das Phase Lead Glied Das Phase-Lead-Glied macht das Zeitverhalten nur ein bisschen besser. An sich ist das so schon ok (ca. 500us bis Endwert ungefähr erreicht). Nur den Überschwinger bekomme ich nicht weg, was aber kein Problem ist. Frage: Liege ich mit der Auslegung ungefähr richtig, oder würde man einen PI Regler (oder PI mit zusätzlicher Null/Pol-Stelle) eher anders auslegen? Cross-Over-frequenz will ich nicht weiter nach oben schieben weil ich sonst mit der Forderung in Konflikt komme dass diese bei max. 10-20% der Schaltfrequenz liegen soll. Hintergrund der Frage ist dass ich nur ein paar Daumenreglen der Regelungtechnik kenne (Phasenreserve, etc.), aber keine Erfahrung habe was in der Praxis erreichbar ist, bzw. nicht einschätzen kann ob das was jetzt raus gekommen ist eher am maximal erreichbaren Limit liegt, oder ob man den Regler auch noch wesentlich besser hin bekommen könnte.
> Peak current control geht bei mir > nicht, weil ich nur einen ADC-Wert > pro Schaltperiode Bei der in der App Note verwendeten Mikrocontrollerfamilie (c2000) überhaupt kein Problem. Für peak current mode einfach einen Eingang mit comparator verwenden. Man kann intern sogar sehr bequem eine slope compensation realisieren. Das sollte sogar mit den etwas in die Jahre gekommenen Atmels gehen. Auch average current mode geht klasse mit den Dingern! Aber auch hier wirst du einen comparator an dem adc Eingang deiner Strommessung brauchen, um eine Cycle by Cycle OCP zu realisieren. Zu Beginn deiner Entwicklung ein sicher hilfreiches Feature! Hab mit dem C2000 schon eine 2ph interleaved CCM PFC realisiert. Wirklich toller Controller! Meine Daumenregeln zum auslegen der Regler: Phasenreserve > 45* (Achtung bei digitaler Realisierung der Regler bei deren Auslegung zusätzlich 2Pi * F.x/F.A mit einrechnen - die Phasenverschiebung die durch die Quantisierung eingefügt wird! - bei der Voltage Loop ggf. zu vernachlässigen, bei peak current mode tritt das durch den comparator I.d.R. nicht auf, bei average current mode kommen da je nach Auslegung schon mal 20* raus) Gainmargin> 10dB Um deine Regelung zu verifizieren empfehle ich z.B. den Bode100! Viel Erfolg! (entschuldige die *, ich schreib grad vom iPhone)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.