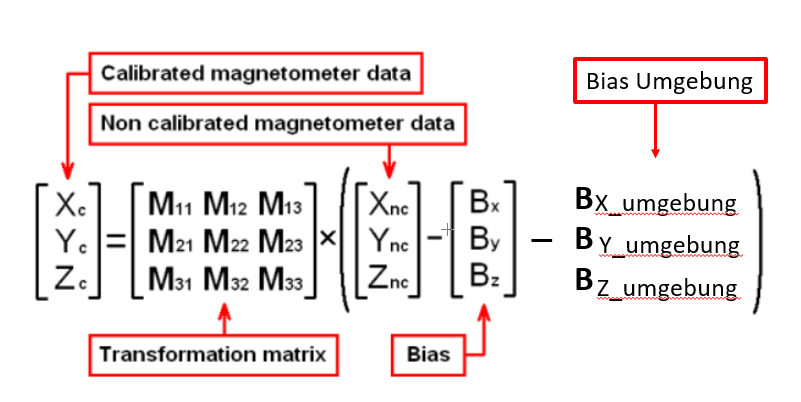
Hallo Leute, ich beschäftige mich aktuell mit der Kalibrierung von Inertialsensoren (IMU - MPU9250, Mikrocontroller stm32f407, Spi) Die Kalibrierdaten vom ACC, Gyro und MAG sind bereits aufgenommen worden.(extern). Nun soll noch zum MAG der Bias für unsere Anwendungsumgebung in die Kalibrierung mit einfließen. (siehe Anhang: hinterer Teil für das Kalibriermodell wurde hinzugefügt) Ich kenne aus dem Datenblatt des MPU9250 die entsprechenden positiven Achsrichtungen X,Y,Z. Die Frage ist jetzt, wie man dazu vorgeht? Nach folgender Anleitung wird der Sensor in 12 vreschiedene Positionen gedreht (Jede Seite wird dabei um 180° gedreht) http://diydrones.com/profiles/blogs/advanced-hard-and-soft-iron-magnetometer-calibration-for-dummies Mit den Werten berechnet er seine Transformationsmatrix und Bias mit einem Programm (Magmaster). Wir besitzen weder das Programm, noch benutzen wir Arduino. Unser Programm in C läuft so ab, dass wir einen Messzeitraum einstellen können, beispielsweise t = 10 s messen. Wie bekommt man nun jeweils einen Wert für X,Y,Z? Wir hoffen, dass uns vielleicht der ein oder andere einen Hinweis geben könnte und sind für jeden Tip dankbar. Grüße Julius
Angehängte Dateien:
-

BIAS.PNG
67 KB
Julius H. schrieb: > Wir besitzen weder das Programm, noch > benutzen wir Arduino. Das Programm steht aber zum Download zur Verfügung. Arduino ist nur die Entwicklungsumgebung. Da wird auch nur C oder C++ programmiert. Müsst ihr halt in euer Projekt integrieren ...
Hallo 123, Die Werte für die Transformationsmatrix und den Bias haben wir bereits. Die Frage ist, wie das allgemeine Vorgehen ist um werte für den Bias innerhalb einer Umgebung zu bekommen. Ich erhalte jeweils 3 Werte (X-Wert, Y-wert, Z-Wert) Drehe ich um 90° erhalte ich wieder 3 neue. Doch was mach man mit den Werten um einen Spaltenvektor mit 3 Kalibrierparameter zu erhalten? Grüße Julius
Hi, Julius, wenn ich den von Dir zitierten Text recht verstanden habe, dann wird nur das Modul mit dem Kompass gedreht. Dazu eine kurze Horrorgeschichte. Die Rückströme über die Karosserie eines Fahrzeugs hätten fast ein Projekt gekostet. Das Einschalten der Heckscheibenheizung machte die Kalibrierung zunichts, die ohne die Heizung durchgeführt worden war. Sogar die Motordrehzahl beeinflusste den Kompassewert, vermutlich über Lichtmaschine und Starterbatterie. Aber weil sich der Kunde mit Ausgleich wegen Minderleistung zufrieden gab, rettete er das Projekt. Denn wir hätten alle größeren Verbraucher, die ihren Versorgungsstrom über die Karosserie zurückleiteten, ummontieren müssen auf Versorgung durch verdrillte Versorgungsleitungen. Die notwendigen Änderungen hätten die Zulassung gekostet. Die Kalibrierung eines Kompass allein durch dessen Drehung ist Pfusch. Sondern, wenn der Kompass in einem Flugmodell eingebaut ist, dann muss das ganze Flugmodell über alle drei Achsen gedreht werden. Einschließlich aller Einflüsse auf den Kompassert. An Flughäfen befinden sich ausgewiesene Plätze zur Kompasskalibrierung - aber da wird das Flugzeug nur im Azimut gedreht und der Kompasswert gilt dann auch nur bei Horizontalflug. Wenn der Modellhubschrauber dann fliegt, dann kommt die spannende Frage, ob die Kalibrierung dann nur für eine einzige Betriebsstellung aller Motoren gilt oder auch bei anderen Lasten und Motordrehzahlen. Da wird dann deutlich, wo die Leitungen zu den Motoren nicht genügend verdrillt waren. Die Kalibrierung eines Kompasses im Schiff ist viel teurer als die eines Tastkopfe am Scope. Ciao Wolfgang Horn
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.