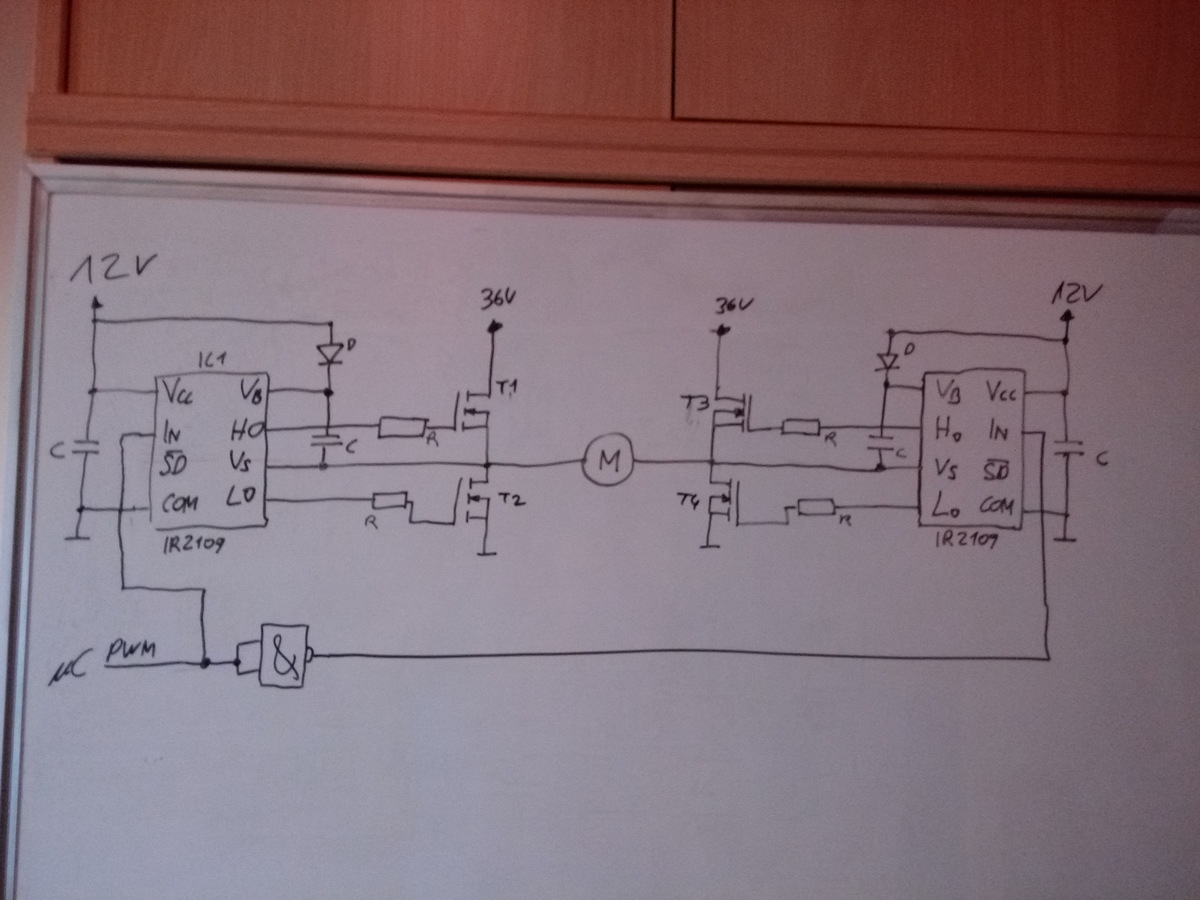
Hallo alle miteinander, ich arbeite mit Freunden an einem Projekt. Wir wollen uns ein Elektrofahrrad bauen. Ich bin für die Steuerelektronik zuständig und habe schon die Daten des Motors von einem Freund erhalten. Es handelt sich um einen simplen DC-Motor. Die Nenndrehzahl liegt bei 2700U/min, die Nennspannung beträgt 36V und der Nennstrom beträgt 28A. Nach einigen Überlegungen und Forenbesuche habe ich mir folgende Schaltung zusammen gestellt[siehe Anhang]. Ich würde gerne den FET-Treiber IR2109 verwenden, da ich diesen leicht besorgen könnte. Für die oberen zwei Transistoren(T1 und T3), welche in der Highside sind verwende ich jeweils eine Ladungspumpe(Bootstrapping). Das PWM-Signal vom von einem PIC Mikroprozessor, welcher ein weiterer Kollege programmieren wird. Ich hätte nun einige Fragen an auch: 1.) Ergibt diese Schaltung für meine Anwendung einen Sinn? Fehlt eventuell etwas oder habe ich etwas übersehen? 2.) Die Nenndrehzahl liegt bei ca. 3000U/min, ist es sinnvoll bei der PWM mit 3kHz anzufangen? 3.) Mein Team und ich hätten auch noch gerne die Möglichkeit einer Rekuperation, ist das mit dieser Schaltung möglich? 4.) Ich habe im Datenblatt des FET-Treibers gesehen, dass Vorwiderstände für die Transistoren verwendet werden. Mir ist aber nicht ganz klar warum? 5.) Wie kann ich in diesem Fall eine Strom und Spannungsmessung realisieren? Ich bedanke mich schon im Voraus für die Hilfe! LG Rainer
Angehängte Dateien:
-

IMG_20171021_183147.jpg
200 KB
Wollt ihr denn auch rückwärts fahren? Ansonsten ist die Anwendung einer H-Brücke nämlich unnötig. Ein z.B. 2 Quadranten Steller tuts dann auch: https://www.mikrocontroller.net/articles/Motoransteuerung_mit_PWM
Zu 1: Es fehlen die ganzen Werte. Eine Sicherung wäre auch schön. Ob die Ansteuerung und die Totzeitgenerierung so klammt bleibt ein Glückspiel. Bei dieser Leistung könnte über dediziert Freilaufdioden nachdenken. Zu 2: Mit einen Oszi den Stromanstieg ansehen... Zu 3: Macht nur die Batterie schneller kaputt. Zu 4: Google Gatevorwiderstand. Zu 5: Hallsensor und Spannungsteiler. Es gibt auch potentere Halbbrücken aus der Automotiven Industrie wie z.B. BTS7960.
Die Schaltung ist Quatsch. Der Motor steht nur bei 50% Tastverhältnis, wird währenddessen aber immer noch bestromt. Außerdem entstehen unnötige Schaltverluste, weil alle 4 Mosfets ständig getaktet werden. Dies ist bei einer Vollbrücke aber stets nur bei zwei Mosfets der Fall, die Anderen werden nur dauerhaft je nach Fahrtrichtung angesteuert.
Angehängte Dateien:
-

Motorsteuerung.png
12 KB
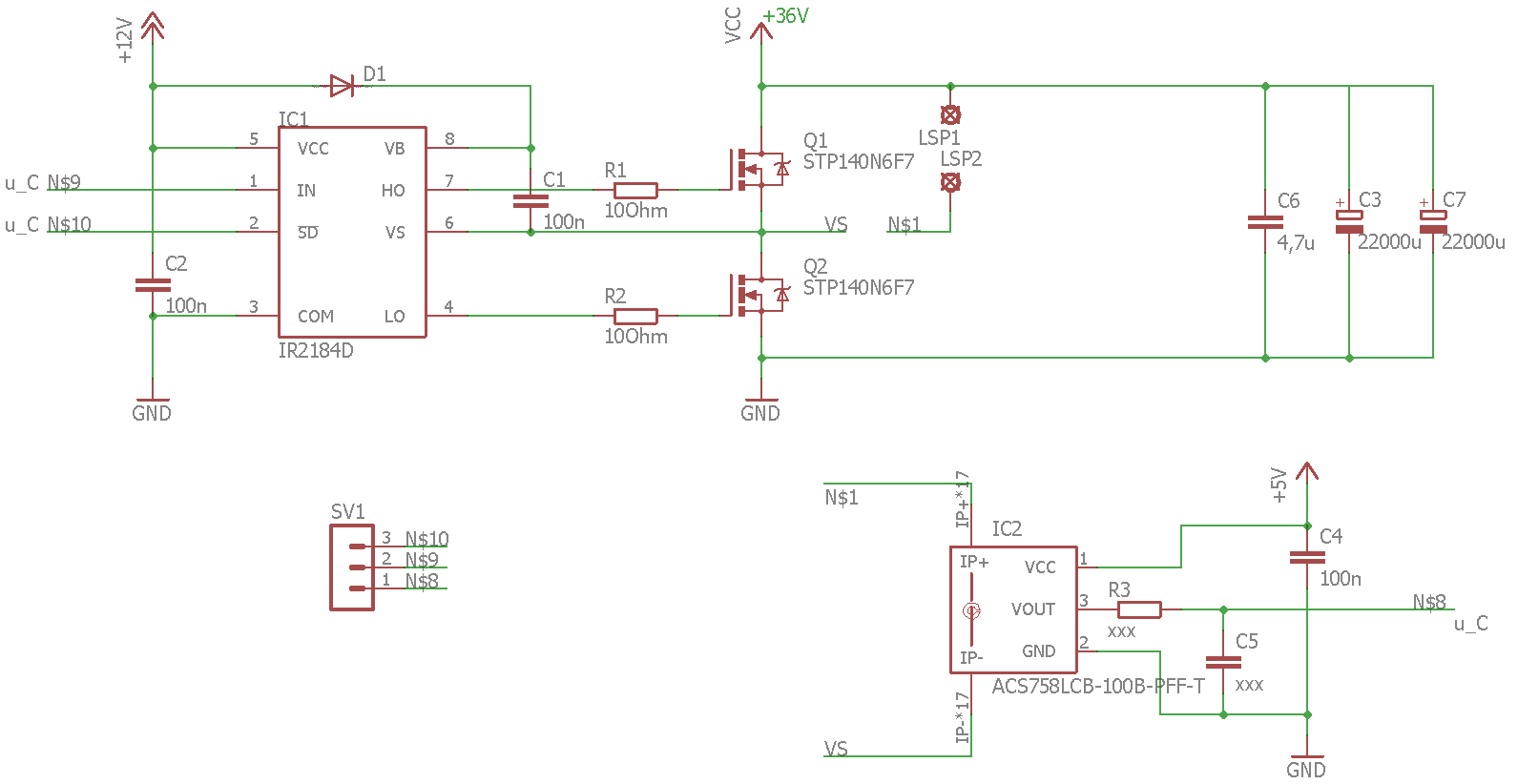
Vielen Danke für eure hilfreichen Antworten! Ich habe die Schaltung nun überarbeitet und bin nun schon fast fertig. 1-2 Bauteilwerte fehlen noch, aber das ist momentan halb so wild. Ich habe zum IR2184 gewechselt und den Strom messe ich mit dem ACS758(ziemlich cooles Teil). An LSP1 und LSP2 wird der Motor angeschlossen. Die Sicherung wird noch extern dazu geschalten.(deshalb nicht vorhanden am Schaltplan) Leute, fehlt noch etwas in meiner Schaltung um meinen DC-Motor mit den oben beschriebenen Funktionen anzusteuern? Ein kleines Verständnisproblem habe ich beim FET-Treibers. Dort steht folgendes: "Output source/sink current capability 1.4A/1.8A". Damit ist der Ausgang Vs gemeint oder? Anfangs dachte ich, dass damit die Ausgänge für die FET's meint (HO,LO), aber dann würde ich ja einen Gatevorwiderstand gebrauchen der ja gut über 30W wegstecken könnte und für den FET wäre das auch nicht so gesund denke ich. Ich werde mich jetzt bald dem Layout widmen. Jedoch habe ich ja schon einen Nennstrom von fast 30A und beim Beschleunigen komme ich auf fast 40A rauf für eine kurze Zeit. Mein bedenken ist jetzt die Breite der Leiterbahnen. Habe bis jetzt immer unproblematische Platinen mit einfachen Sensoren geroutet aber bei solchen Leistungen stehe ich an. In dem Link: https://www.mikrocontroller.net/articles/Leiterbahnbreite steht, dass sich bei einer Dicke von 35um und Breite von 10mm die Leiterbahn bei 20A schon um 30K erhöht. Ist es sinnvoll eine 70um Leiterbahndicke mit einer Breite von 10cm in Auftrag zu geben, denn ich habe nicht unendlich viel Platz für die Platine. Hat vielleicht jemand von euch mit dem Routen solcher Leistungen Erfahrung? Ich bin wie immer sehr dankbar über jede Antwort :-) Danke im Voraus Rainer
Rainer P. schrieb: > Damit ist > der Ausgang Vs gemeint oder? Vs ist kein Ausgang, sondern der Bezugspunkt für die Highside Ladungspumpe. Rainer P. schrieb: > Anfangs dachte ich, dass damit die Ausgänge > für die FET's meint (HO,LO), aber dann würde ich ja einen > Gatevorwiderstand gebrauchen der ja gut über 30W wegstecken könnte und > für den FET wäre das auch nicht so gesund denke ich. Doch, damit sind HO und LO gemeint. Dein Denkfehler ist, das ein MOSfet Gatestrom braucht, das tut er nicht. Es wird lediglich das Gate aufgeladen, das für den Treiber wie ein Kondensator aussieht. Um das zügig zu laden, kann der Treiber die Amperes liefern. Um die Anstigszeit dabei zu reduzieren und den Spitzenstrom des Treibers zu drücken, ist der Gatevorwiderstand da.
Matthias S. schrieb: > Um das zügig zu laden, kann der Treiber die Amperes liefern. Um die > Anstigszeit dabei zu reduzieren und den Spitzenstrom des Treibers zu > drücken, ist der Gatevorwiderstand da. Ist es nicht so, daß der Gatewiderstand die Anstiegszeit verlängert und nicht reduziert? Und soll der Spitzenstrom nicht so hoch sein, wie es der Treiberbaustein überhaupt hergibt? Für den IR2184 ist ein Kurzschlußstrom von 1,4/1,8A angegeben, der begrenzt sich also selber. Will man den extra verringern? Daß der Treiber diesen Strom nicht als Dauerstrom verträgt ist klar. Ich kenne eigentlich nur zwei Gründe für einen Gatewiderstand größer als 0Ω: Als Poor Mans Monoflop wenn man keine bessere Methode hat, Shoot Through zu vermeiden und um Schwingungen beim Umschalten zu reduzieren, so sie denn auftreten. MfG Klaus
Klaus schrieb: > Als Poor Mans Monoflop wenn man keine bessere Methode hat, Shoot Through > zu vermeiden und um Schwingungen beim Umschalten zu reduzieren, so sie > denn auftreten. Und als EMV Maßnahme wenn man vorhat irgendwann nochmal Radio zu hören. Wird aber zunehmend dadurch verdrängt dass man Treiber ICs mit slope compensation hat, also Stromquellen auf low und high side. Praktischerweise dann direkt kurzschlussfest was die Werte bei der Sicherheitsanalyse verbessert.
Danke für die schnellen Antworten! Okay, dann liegen die knappen 2 Ampere doch an den FETs an. Und was bedeutet das jetzt für den Vorwiderstand? Der Strom liegt nicht die ganze Zeit an, sondern wird ja vom Treiber gepulst. Soll ich trotzdem einen Widerstand benutzen der höhere Leistungen wegstecken kann? Wie zum Beispiel: http://at.rs-online.com/web/p/leistungswiderstande-im-alugehause/0158339/ oder http://at.rs-online.com/web/p/smd-widerstande/7962520/ Bezüglich Layout hat keine Tipps von euch? Danke und MfG Rainer
Klaus schrieb: > Ist es nicht so, daß der Gatewiderstand die Anstiegszeit verlängert und > nicht reduziert? Klar ist es so, da habe ich im Eifer des Gefechtes es genau falschrum beschrieben. Klaus schrieb: > Ich kenne eigentlich nur zwei Gründe für einen Gatewiderstand größer als > 0Ω: Un die die o.a. Gründe kommen noch dazu. Sind also schon 4 Gründe. Rainer P. schrieb: > Okay, dann liegen die knappen 2 Ampere doch an den FETs an. Nur im Moment der vollständigen Ladung oder Entladung des Gate-Kondensators, also für den ersten Moment des Ansteuervorgangs. Der Strom geht genauso zurück, wie wenn du einen Kondensator auflädst oder entlädst. Ein kräftiger MOSFet wie der IRFB3207 hat gerade mal eine Gateladung von max. 260nC - aöso recht klein. > Soll ich trotzdem > einen Widerstand benutzen der höhere Leistungen wegstecken kann? Brauchst du nicht. Die mittlere Leistung an diesem Widerstand ist sehr klein. Rainer P. schrieb: > Bezüglich Layout hat keine Tipps von euch? Jede Menge, aber die kannst du dir auch von Motorcontrollern im Netz abgucken. Kräftige Leitungen für den Motorkreis und die Masse und Plus des Motors nicht quer über die ganze Platine, sondern kurz und knapp zur Batterie und zur Endstufe. Dazu grosse Reservoir-Elkos für den 36V Kreis, aber die hast du ja schon vorgesehen.
Vielen Dank! Habe die Schaltung gelayoutet und habe sie eine Bekannten gezeigt. Er hat gemeint, dass diese Schaltung so vermutlich gar nicht funktionieren wird. Er meinte, in dem Moment, wo der obere Transistor(Q1) leitet und der untere sperrt, wird die Spannung in der Masche zwischen Q1 und Motor extrem hoch. Die Spannung wird so hoch, dass es kritisch für meine Bauteile sein würde. Weiters sagte er, dass der Motor, wenn Q1 leitet und Q2 nicht, gar nicht mit Masse verbunden ist und keine Energierückgewinnung stattfinden könnte. Er meinte, dass er das mit einem einfachen Einquadrantensteller lösen würde. Aber da habe ich ja 1. kein aktives Bremsen und 2. auch keine Energierückspeisung. Ich bin jetzt auf jedenfall total verunsichert und wollte nochmal nachfragen, bevor ich das Layout in die Fertigung gebe. Was meint ihr? Ich gebe ja mit der PWM das Verhältnis vor, in welchem dann die Transistoren schalten. Steht auch so im Datenblatt des Treibers, halt in meinem Fall invertierend wegen der Schaltung. 100% von Q1 ist nicht möglich, durch die Ladungspumpe, da sich die schnell wieder entlädt. Damit ist auch kein 100%iges aktives Bremsen möglich, spielt aber in unserer Anwendung keine Rolle. Wenn sich jetzt der Motor im Generatorbetrieb befindet, sprich die induzierte Spannung ist größer als die Batteriespannung von 36V, kann ich nur dann Energie zurück führen, wenn der untere Transistor leitet und der obere sperrt oder? Falls nicht, bitte ich um eine Erklärung der Energierückgewinnung bei dieser Schaltung :-) Liebe Grüße Rainer
Der Motor hängt parallel zum oberen Fet, ja? Wieso sollte dann die Spannung ansteigen, wenn der obere Fet leitet? Dann steigt allenfalls der Strom an, wenn sich der Motor noch dreht. Der Strom wird sobald der obere Fet wieder sperrt und der untere leitet in den Akku gespeist. (Rekurpation) Wenn der obere Fet auf Dauer an ist, also nach dem Entladen des Bootstrap Kondensators wie der untere Fet sperrt, hätte man einen "Leerlauf", weil im Motorkreis kein Strom mehr fließt. Für den Stillstand sinnvoll. Und wenn der untere Fet dauerhaft an ist Vollgas. Sollte so eigentlich funktionieren.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.