Hallo zusammen
Ich habe mir einmal die Daten eines Motors angesehen.
1
Kv2350
2
Configuration12N14P
3
Windings11turnDLRK
4
TerminationD(Delta)
5
StatorDiameter22mm
6
ShaftDiameter3mm
7
MotorDimension27x17mm
8
Weight26.5g,(29gwithbullets)
9
IdleCurrent@12.6v(Io)0.81A
10
Cells(LiPo)2-4S
11
MaxContinuousCurrent(A)60s16A
12
MaxBurstCurrent<10s32A
13
MaxContinuousPower(W)60s260W
14
MaxEfficiencyCurrent(2.2-6A)80%
15
InternalResistance(Rm)260mΩ
16
MotorWireLength100mm
17
MotorConnectionMale2mmbullet
Nun habe ich eine Frage zum Strom und zur Leistung.
Die Leistung P = U*I = 260W
Angenommen ich gehe jetzt nur mal vom maximal kontinuierlichen Strom für
60sec mit 16 Ampere aus, würde es heissen, dass ich dann maximal eine
Spannung von 16,25V am Motor anlegen dürfte, um die Leistung nicht zu
überschreiten.
Es stellt sich mir die Frage dann im Falle einer Verwendung von einem
Mosfet, der einen RDSon von 0.026 Ohm hätte, wenn er voll
durchgeschaltet ist. Angenommen ich würde die Leistung auf 240W
beschränken und würde eine Versorgungsspannung von 15V verwenden, an die
der Mosfet (UDS) angeschlossen ist.
Bei Í = 15V/0.026Ohm = 576,9A
Das überschreitet doch den maximalen Strom deutlich... und der Motor
würde mir da abrauchen..
Wie funktioniert das denn genau. Mit einer PWM erreicht man ja auch,
dass die Mosfets voll durchgeschaltet und abgeschaltet werden. Dadurch
wird zwar die Spannung über die Zeit (duty cycle) geregelt, aber auch
mit einem Strom von V_RMS = 1V, bekomme ich einen Strom von 38.5
Ampere..
Das hält der Motor ja auch nicht aus.
Und die Verluste steigen, wenn ich einen Mosfet mit höherem RDSon
verwende.
Und irgendwie mehr als 2350 Umdrehungen bei 1V möchte ich ja auch
erreichen.
Ich bin etwas verwirrt und würde auf etwas Hilfe und Erleuchtung hoffen.
Hallo
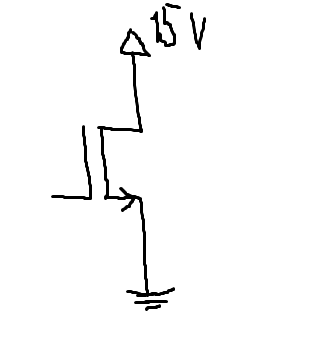
Siehe Bild, sobald der Mosfet doch durchgeschaltet ist, liegen die 15V
an.
Mittels der PWM sieht der Motor also 15V * dutycycle.
Der Mosfet aber die 15V.
sebastian schrieb:> Hallo>> Siehe Bild, sobald der Mosfet doch durchgeschaltet ist, liegen die 15V> an.> Mittels der PWM sieht der Motor also 15V * dutycycle.> Der Mosfet aber die 15V.
Sorry, ich habe das Bild vergessen
Der Trick ist es nicht die Versorgungsspannung kurzzuschließen,
sondern die Spannung über die Motorspulen zu schalten ;-)
Diese Spulen haben eine Induktivität, der Strom kann sich hier also
nicht
unendlich schnell ändern. Heißt: wenn der MOSFET durchschaltet
steigt der Strom (durch Spule und MOSFET) "langsam" an und
damit steigt die Spannung die am MOSFET abfällt.
Dann haben die Motorspulen einen Innenwiderstand hier 260 mOhm,
damit bilden Motorspule und MOSFET einen Spannungsteiler, sodass
bei 26 mOhm RDSon maximal 1/10 der Versorgungsspannung am MOSFET
abfallen können.
Dazu kommt noch, dass ein Motor ein drehendes Feld benötigt um
sich zu drehen. Die Motorspulen werden also nicht dauerhaft
bestromt, sondern nur zeitweise (Kommutierung),
dadurch erreichst du den von dir errechneten Maximalstrom nicht,
dieser stellt sich nämlich erst bei sehr langen Zeiten ein.
Bei schneller PWM "sieht" der Motor somit nur den Mittelwert,
also bei 50% etwa die Hälfte der Versorgungsspannung.
("schnell" heißt hier: schneller als die "langsame"
Motorzeitkonstante gegeben durch die Induktivität der Spulen)
Gerd schrieb:> Der Trick ist es nicht die Versorgungsspannung kurzzuschließen,> sondern die Spannung über die Motorspulen zu schalten ;-)> Diese Spulen haben eine Induktivität, der Strom kann sich hier also> nicht> unendlich schnell ändern. Heißt: wenn der MOSFET durchschaltet> steigt der Strom (durch Spule und MOSFET) "langsam" an und> damit steigt die Spannung die am MOSFET abfällt.> Dann haben die Motorspulen einen Innenwiderstand hier 260 mOhm,> damit bilden Motorspule und MOSFET einen Spannungsteiler, sodass> bei 26 mOhm RDSon maximal 1/10 der Versorgungsspannung am MOSFET> abfallen können.> Dazu kommt noch, dass ein Motor ein drehendes Feld benötigt um> sich zu drehen. Die Motorspulen werden also nicht dauerhaft> bestromt, sondern nur zeitweise (Kommutierung),> dadurch erreichst du den von dir errechneten Maximalstrom nicht,> dieser stellt sich nämlich erst bei sehr langen Zeiten ein.> Bei schneller PWM "sieht" der Motor somit nur den Mittelwert,> also bei 50% etwa die Hälfte der Versorgungsspannung.> ("schnell" heißt hier: schneller als die "langsame"> Motorzeitkonstante gegeben durch die Induktivität der Spulen)
Hallo Gerd
Vielen Dank für deine Erläuterungen. Jetzt ist mir so Einiges klarer
geworden. ;) Ich werde morgen einmal versuchen etwas zu skizzieren und
kleine Berechnungen anzustellen. Vermutlich werden weitere Fragen
auftauchen. Ich würde dann hoffen, weitere guten Hilfestellungen wie von
dir zu bekommen.
Ich bin neu in diesem Gebiet und da ich aufgrund eines Unfalls nun für
ein ganzes Jahr im Krankenstand bin, denke ich, dass dies mein neues
Hobby sein wird. ;)
Ich wünsche allen Lesern eine gute Nacht
Was für ein Motor ist das denn überhaupt? Ist das einer
mit Dauermagnet oder mit Erregerspule in Reihe mit dem
Läufer? Wenn er eine Erregerspule hat, kann diese als
Speicherdrossel für die PWM arbeiten. Ansonsten würde
ich da extra eine Speicherdrossel vorschalten, damit
der Strom gleichmäßiger ist und dadurch dann der
Wirkungsgrad besser ist.
In der bisherigen Stromorientierten und ohmschen Betrachtung scheint es
um den Fall zu gehen wo der Motor sich (noch) nicht dreht. Also nur
kurzzeitig auftretende Ströme/Verlustleistungen beim Anlaufen. (den
Blockierfall mal aussen vor gelassen)
Entsprechend vermisse ich: ist der Motor sich am drehen so erzeugt er
eine Gegenspannung (bewegte Spulen im Magnetfeld, in manchen Texten EMK
genannt). Diese Gegenspannung subtrahiert sich von der Betriebsspannung
(Maschensatz), also sieht der o.g. Spannungsteiler aus Ri+Rdson weniger
Gesamtspannung, der Strom und die Verlustleistung (am FET, am Motor)
sind auch weniger.
Die EMK Gegenspannung ist am grössten wenn vom Motor kein Drehmoment
abgenommen wird (Leerlauf, nur Lagerreibung und Lufverwirbelung am
Rotor); sie sinkt um so mehr Lastdremomoment herrscht; sie ist Null wenn
die Motorwelle steht.
Die Zusammenhänge sind beinahe linear bei eisenlosen Motorkonstruktionen
(Faulhaber, Maxon,...). Sind Eisenanker im Spiel (Bühler, Mabuchi,
Johnson, Japanium, Chinesium,...) wird's unlinear.
sebastian schrieb:> Und irgendwie mehr als 2350 Umdrehungen bei 1V möchte ich ja auch> erreichen.
Mit nur einem Volt wirst Du den Motor ja auch nicht betreiben wollen (da
ist der Wirkungsgrad auch unterirdisch).
Bei 15V Betriebsspannung sind das >30000 Upm - wenn Dir das zuwenig ist,
musst Du die Betriebsspannung erhöhen oder einen Motor mit einem höheren
KV-Wert nehmen.
Nach den Angaben handelt es sich vermutlich um einen Brushless-Motor, da
wird die Betriebsspannung nicht über nur einen MOSFET geschaltet,
sondern über min. 6 Stück davon (je 2 für jede Motor-Phase als
Halbbrücke). Die entsprechende Ansteuerschaltung dafür sollte auch den
Motorstrom überwachen und die FETs mit entsprechend angepasster PWM
ansteuern, damit sich der Strom auch im Anlauf-Fall oder bei blockiertem
Motor in Grenzen hält. Abgesehen davon verträgt der Motor für den
Sekunden-Bruchteil des Anlaufens auch deutlich mehr, als den angegebenen
maximalen "Burst"-Current.
Hallo zusammen
Vielen Dank für die vielen Erläuterungen.
Ich habe mich mal ein wenig in das Thema der Synchronmotoren eingelesen.
Es ist wie Thomas Elger sagt ein BLDC Motor.
Wie angekündigt, sind ein paar Fragen aufgetaucht und ich wäre euch
dankbar, meine Feststellungen wegen des berechneten Stromes und der
berechneten Spannung ganz unten zu kommentieren.
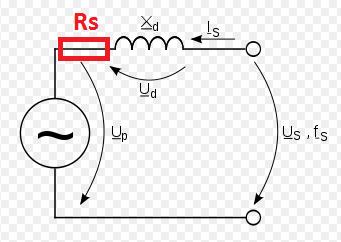
Ich habe gesehen, dass man einen Synchronmotor folgend modellieren kann.
https://commons.wikimedia.org/wiki/File:Vereinfachtes_Ersatzschaltbild_Synchronmaschine_am_Netz.svg
Wie Motorenfütterer sagt, muss Polradspannung Up also von U1 abgezogen
werden (Maschensatz). Ich habe ebenfalls in einem Datenblatt AN857
gelesen, dass zB 2 Sequenzen folgend geschaltet werden.
Phase A = high
Phase B = floating
Phase C = low
Danach
Phase A = floating
Phase B = high
Phase C = low
Das heisst, dass der Strom immer durch 2 Spulen zugleich fliessen muss,
um das Massepotential zu erreichen. Also habe ich 2xL = 2x260mOhm
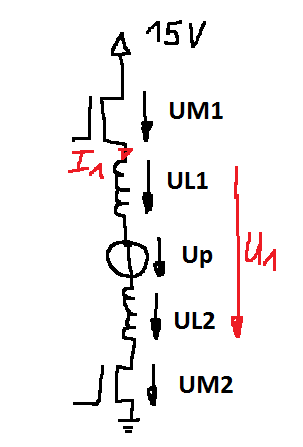
Wenn ich das was Motorenfütterer und Thomas Elger sagt berücksichtige,
komme ich auf die Schaltung wie im angehängten Bild. Betriebsspannung
sei jetzt einmal 15V. Rdson der Mosfets immer noch 26mOhm.
Der Innenwiderstand 260mOhm entspricht so wie ich es verstehe, der
Impedanz Z, was eigentlich Z = Ri+Xd entspricht. Da der Innenwiderstand
vernachlässigt werden kann, ist Z=Xd= 260mOhm. Richtig?
Die Spannung über der Spule muss dann UL1,2 = Xd*I1 sein. Die
Gesamtspannung dann UL = 2*Xd*I1
Jetzt nehme ich an, dass ich über den Motorspulen 7.5V erreichen möchte.
Dann muss ich ein Tastverhältnis von 50% einstellen. Damit wäre dann U1
= 7.5V
Jetzt habe ich schon Probleme dabei meine eigene Rechnung zu
verifizieren. Es stellt sich mir ausserdem die Frage, ob auch bei einem
Permanentmagnet-Polrad Up auch existiert?!
Um den Strom zu berechnen, der durch die Spulen fliesst setze ich
folgendes an:
Laut einer Bachelorarbeit, die ich im Netz gefunden habe soll die
Polradspannung
Up = wR * Mf*If
sein.
Dabei gilt:
ωR Winkelgeschwindigkeit des Rotors (und des Drehfeldes)
Mf Gegeninduktivität der Feldwicklung zur Statorwicklung
(Motorenkonstante)
If Erregerstrom (Gleichstrom in der Rotorwicklung)
Mf*If auch Flussverkettung genannt.
Wie man diese misst steht hier:
https://de.wikipedia.org/wiki/Synchronmaschine
Angenommen diese Spannung Up ist 1,5V.
dann ist mit U1-UL-Up =0
UL= U1-Up = 6V
UL/2*Xd = I1 = 23,08A
P = 23,08*7.5V = 173W
Dann heisst das, dass das an einem Mosfet 7.5/2 = 3.75 V abfallen
müssen, wenn die Summe UB - UM1 - UM2 - U1 = 0 sein soll (UB = 15V)
Wenn ich aber UM1 = I1 * Rdson rechne, komme ich aber auf 0.6V anstatt
3.75V
Was mache ich falsch bzw. wo ist der Wurm?
sebastian schrieb:> Der Innenwiderstand 260mOhm entspricht so wie ich es verstehe, der> Impedanz Z, was eigentlich Z = Ri+Xd entspricht. Da der Innenwiderstand> vernachlässigt werden kann, ist Z=Xd= 260mOhm. Richtig?
Bei einem guten Motor sollte es eigentlich eher der ohmsche Widerstand
der Wicklung sein, den man vernachlässigen kann! Hier also die 260 mOhm.
Dein Fehler dürfte sein, daß Du versuchst, die Wirkleistung des Motors
über die Velustleistung an den ohmschen Widerständen der Wicklung und
der MOSFETs zu berechnen.
Deine angenommene Polradspannung von 1,5V ist für eine effektive
Betriebsspannung von 7,5V (durch PWM = 50% bei 15V) viel zu niedrig -
der Motor würde in einem sehr ungünstigen Betriebspunkt betrieben (mit
entsprechend unterirdischem Wirkungsgrad) und hauptsächlich Verluste
durch den ohmschen Widerstand der Wicklung produzieren.
Betrachte vereinfacht den Motor mal als Generator, der bei einer
Drehzahl N (in Upm) N/KV Spannung produziert. Dein Motor erzeugt also
z.B. bei 10000/min Ug = 10000/2350 = 4,3V. Bei von außen angelegter
Klemmenspannung Uk = 4,3V ist der Motorstrom dann 0, weil Ug und Uk
gleich sind.
Legen wir nun bei gleicher Drehzahl Uk = 7,5V Spannung an, fließt ein
Strom, der sich durch die Spannungsdifferenz und Widerstände ergibt,
hier also dann ca. 6,4A. Die Eingangsleistung ist dann 48Watt, wovon
etwa 20,5W in den inneren Widerständen als Verlustleistung verbraten
werden und 27,5W an der Welle als mechanische Leistung abgegeben werden.
Das ist natürlich alles idealisiert und Reibung und
ummagnetisierungs-Verluste sind nicht berücksichtigt.
Ich bin mir allerdings nicht sicher, ob der angegebene Widerstand von
260 mOhm für eine Wicklung gilt oder zwischen zwei Motoranschlüssen = 2
Spulen in Serie gemessen wird.
Hallo Thomas
Das Modell habe ich so zumindest endlich einmal auch verstanden und
weiss jetzt auch was die Polradspannung wirklich ist. ;)
Ich habe aufgrund deines Beitrags, bevor ich mich morgen nochmals damit
beschäftige, 2 Fragen.
Wie finde ich heraus ob der Widerstand für 2 Spulen gilt oder für eine?
Ausserdem hätte ich laut vereinfachtes Modell gedacht, dass eher der
Widerstand weniger eine Rolle spielt, aber die Impedanz der Spule dafür
mehr. Deshalb ist ja auch nur die Spule skizziert. Aber die ist ja nicht
angegeben, sprich zB X_L = jwL = ?? Ohm? Wobei die ist ja
frequenzabhängig und kann ja so nicht angegeben werden, daher müsste
doch die Induktivität L angegeben werden. Oder täusche ich mich?
Wenn man dann den Betrag der Impedanz ansieht, heisst es, dass mit
steigender Frequenz auch die Verluste steigen.
Doch noch eine 3. Frage:
die Frequenz w in der Formel jwL --> das ist ja die Frequenz des
Wechselsignals. Ich bin mir jetzt nicht so sicher, das ist letztendlich
doch die Frequenz mit der die Stufen geschaltet werden und diese ist von
der Rotor- oder Polradposition abhängig. Wie berechne ich diese genau?
Fragen über Fragen... ;)
gute Nacht
Hallo Sebastian,
sebastian schrieb:> Wie finde ich heraus ob der Widerstand für 2 Spulen gilt oder für eine?
Notfalls durch Messen. Solch kleine Werte am Besten mit einem
Labornetzteil (z.B. auf 1A Strombegrenzung einstellen) und Voltmeter:
Strom durch den Motor schicken und Spannung an den Motor-Anschlüssen
messen.
sebastian schrieb:> Ausserdem hätte ich laut vereinfachtes Modell gedacht, dass eher der> Widerstand weniger eine Rolle spielt, aber die Impedanz der Spule dafür> mehr.
Rolle wofür? Die Impedanz des Motors ist ja nicht angegeben, sondern nur
der ohmsche Widerstand der Wicklung. Dieser spielt eine große Rolle für
den Wirkungsgrad.
sebastian schrieb:> Wobei die ist ja> frequenzabhängig und kann ja so nicht angegeben werden, daher müsste> doch die Induktivität L angegeben werden. Oder täusche ich mich?
Richtig, aber lässt sich L auch nicht so einfach angeben, weil es alles
andere als konstant ist. Die Bleche verhalten sich ja nicht-linear, und
auch die Rotorstellung dürfte einen deutlichen Einfluss auf die
Induktivität haben, weil der magnetische Kreis mal mehr und mal weniger
"geschlossen" ist.
sebastian schrieb:> Wenn man dann den Betrag der Impedanz ansieht, heisst es, dass mit> steigender Frequenz auch die Verluste steigen.
Der Schein-Widerstand steigt, aber nicht unbedingt die Verluste! Für
Verluste ist der Widerstand des Kupfers und Verluste im Eisen
verantwortlich, nicht die Induktivität.
sebastian schrieb:> die Frequenz w in der Formel jwL --> das ist ja die Frequenz des> Wechselsignals. Ich bin mir jetzt nicht so sicher, das ist letztendlich> doch die Frequenz mit der die Stufen geschaltet werden und diese ist von> der Rotor- oder Polradposition abhängig. Wie berechne ich diese genau?
Das "Umschalten der Stufen" = Kommutierung muss beim Synchronmotor
synchron zur Stellung des Rotors erfolgen. Wobei eine "mechanische"
Umdrehung durch die Bauart und Wickelschema des LRK-Motors einer recht
großen Zahl "elektrischer" Umdrehungen entspricht. Es ergibt eine Art
eingebautes "Untersetzungsgetriebe" von (hier) 7:1, d.h. 7 komplette
elektrische Feldumdrehungen ergeben nur eine mechanische Umdrehung.
http://www.aerodesign.de/peter/2001/LRK350/Warum_dreht_er_so.html#Anker118978
Thomas E. schrieb:> Hallo Sebastian,>> sebastian schrieb:>> Wie finde ich heraus ob der Widerstand für 2 Spulen gilt oder für eine?>> Notfalls durch Messen. Solch kleine Werte am Besten mit einem> Labornetzteil (z.B. auf 1A Strombegrenzung einstellen) und Voltmeter:> Strom durch den Motor schicken und Spannung an den Motor-Anschlüssen> messen.>
Vielen Dank für deine Erläuterungen.
Ich habe mir jetzt nochmals Gedanken gemacht. Es geht mir folgend darum,
den Strom durch die Spulen zu bestimmen.
Wir hatten ja kurz über den Fall gesprochen, dass bei gewünschten 10000
Umdrehungen eine Spannung Up = 4.3V induziert werden würde. Mit Us = 7.5
V würde dann mit 2 Wicklungen (2xRi) also ein Strom von 6.4A fliessen.
Nur zur 1. Frage: Wie kann ich nun genau bestimmen, welche Spannung an
den Klemmen anliegen muss, damit ich überhaupt die 10000 Umdrehungen
erreiche?
Es ist ja sicherlich nicht so, dass genau bei diesem Fall von Us = 7.5 V
auch 4.3V erreicht werden, sprich 10000 Umdrehungen.
Ich denke einfach, solange ich das nicht berechnen kann, habe ich das
Ganze auch nicht verstanden. So lerne ich anscheinend am Besten.
Weiters habe ich mir überlegt, dass auch eine Spannung an der Wicklung
selbst abfallen muss, nicht nur am Innenwiderstand Ri.
Ich habe nochmals das Schaltbild aus dem Netz genommen und den
Wicklungs-Widerstand eingesetzt, da dieser ja angegeben ist. Auf diese
Weise aber habe ich keinerlei Kenntnis über die Grösse der Spannung, die
an der Induktivität abfällt.
Jedoch komme ich zu folgendem Ergebnis:
Us.... Klemmenspannung
Ld.... Induktivität
Xd.... ws*Ld
Rs.... Innenwiderstand (Wicklung)
Up.... Polradspannung
dU.... Differenzspannung ( Z*Is = (Rs+jXd)*Is )
_k.... heisst komplex
Us_k - Up_k - dU_k = 0
Us_k = Up_k + dU_k = Up_k + (Rs+jXd)*Is_k
Is_k = (Us_k - Up_k)/(Rs+jXd) = Ud_k/(Rs+jXd)
Macht es Sinn so zu rechnen? Eine Einzige Aussage kann ich nur über den
Widerstand Rs treffen, kenne ja seine Grösse und der Polradspannung Up_k
= Up_dach * e^(wt+Phi) = Up_dach * (cos(wt+Phi) + j*sin(wt+Phi))
Wie kann ich denn am Besten vorgehen, um den Strom festlegen zu können?
Es muss ja letztendlich möglich sein, dass die Bauteile (Mosfets) den
Max Continuous Current (A) 60s = 16A und Max Burst Current <10s = 32A
vertragen?
Gibt es da eine geschickte Vorgehensweise?
sebastian schrieb:> Nur zur 1. Frage: Wie kann ich nun genau bestimmen, welche Spannung an> den Klemmen anliegen muss, damit ich überhaupt die 10000 Umdrehungen> erreiche?> Es ist ja sicherlich nicht so, dass genau bei diesem Fall von Us = 7.5 V> auch 4.3V erreicht werden, sprich 10000 Umdrehungen.
Die erforderliche Eingangsspannung, um z.B. 10000 Upm zu halten, hängt
natürlich stark von der Leistung ab, die dem Motor abverlangt wird. Wenn
der Motor lediglich im Leerlauf rotieren soll, fließt nur der
Leerlaufstrom (der ist ja zum Motor angegeben), und dementsprechend muss
die Spannung nicht weit über 4,3V liegen (über'n Daumen: ein halbes Ohm
Ri, 0,8A Leerlaufstrom -> 0,4V Spannungsabfall, also Eingangsspannung
bei 4,7V, in der Praxis ggf. etwas mehr). Wenn der Motor richtige
Leistung abgeben soll, muß die Spannung entsprechend höher sein, damit
genügend Strom durch die Wicklung fließt, um das Drehmoment für die
geforderte Leistung zu erzeugen. Denn der Strom erzeugt das Drehmoment,
und die Spannung bestimmt die Drehzahl.
Hallo Thomas
Achso, solange also keine Last dran ist, fliesst immer der
Leerlaufstrom, in diesem Fall 0.81A.
Mit angegeben ist aber, dass dieser bei 12.6V fliesst.
Das würde also heissen, dass dies dann 12.6V - 0.81A*2*0.26Ohm ca.
Up=12.2V ergibt.
12.2V*2350U/V ergibt dann etwa 28600 Umdrehungen. (Ohne Verluste)
So wie ich dich aber verstehe, müssen auch 0.81A fliessen, wenn ich zB
Us=15V anlege. (Dazu müsste natürlich die Betriebsspannung höher sein
als die bisher angenommenen Spannung U_Betrieb=15V)
Wieso gibt der Hersteller dann die 12.6V an?
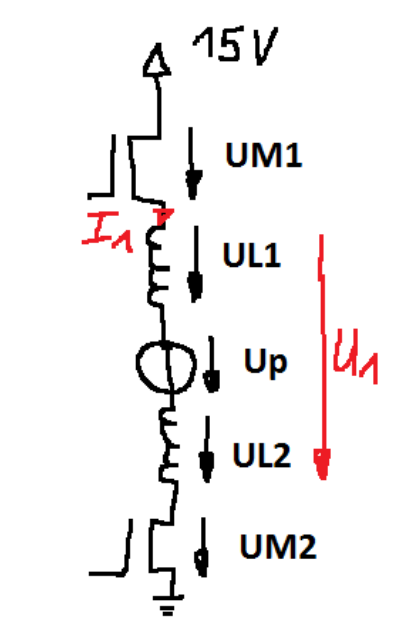
Es ist mir klar, dass die Spannung die Geschwindigkeit ändert und der
Strom das Moment. Jedoch "regle" ich doch über die Mosfets bzw. der PWM
die Spannung. (Siehe Bild) Der Strom Is ergibt sich doch dann, je nach
dem welche Last dranhängt.
Ich kann doch so mit der Kommutierung allein nicht auch noch den Strom
regeln, sondern nur irgendwie begrenzen.
Liege ich da richtig?
Angenommen ich hätte den Fall Up=4.3V + Ohmsche Verluste am
Innenwiderstand Rs. Us wäre dann ca. 4.7V. Drehzahl wäre dann also bei
10000 Umdrehungen.
Jetzt möchte ich auf 20000 beschleunigen und das wenn möglich sehr
rasch. Beim Beschleunigen werden hohe Momente benötigt, daher steigt
dann auch der Strom an.
Ich würde nun sagen, dass die PWM in jeden Fall geändert werden muss,
damit sich ein höheres Us einstellt und die Geschwindigkeit steigt.
Dabei muss ich mich ganz auf den Motor und seine Zeitkonstante
verlassen, da ich ja nach der PWM, die von der Regelung vorgegeben wird,
ja gar keinen Einfluss mehr habe, den Strom zu regeln. Denn dies
geschieht ja über die Kommutierung.
Bei einem Flugobjekt zB wird ja die Drehzahl vorgegeben, sprich die
Spannung. Die Drehzahl sollte aber ziemlich schnell erreicht werden.
Damit muss ich doch zusätzlich auch das Moment bzw. den Strom regeln
können.
Wie bewerkstelligt man das genau?
Mit der Vektorregelung regelt man ja auch nur das Moment und den magn.
Fluss
Vielen Dank
Grüsse Sebastian
Hi Sebastian,
sebastian schrieb:> 12.2V*2350U/V ergibt dann etwa 28600 Umdrehungen. (Ohne Verluste)
der Verlust am internen Spannungsabfall gehört ja auch schon zu den
Verlusten. Sonst rechnet man einfach KV*angelegte Spannung = Drehzahl.
sebastian schrieb:> So wie ich dich aber verstehe, müssen auch 0.81A fliessen, wenn ich zB> Us=15V anlege. (Dazu müsste natürlich die Betriebsspannung höher sein> als die bisher angenommenen Spannung U_Betrieb=15V)
Ja, der Leerlaufstrom ändert sich nur geringfügig mit der
Eingangsspannung.
sebastian schrieb:> Wieso gibt der Hersteller dann die 12.6V an?
Etwas variiert er aber doch, daher wird eine Referenzspannung angegeben,
bei der der angegebene Leerlauf-Strom gemessen wird.
Die 12,6V ergeben sich aus der empfohlenen LiPo-Zellenzahl (3s Lipo,
vollgeladen)
Generell wird der Betriebsspannungsbereich nur angegeben, damit der
Kunde (Zielgruppe für diesen Motor dürften die Modellbauer sein) einen
Richtwert hat, in welchem Spannungsbereich der Motor sinnvoll betrieben
werden kann.
Das ist als Richtwert zu betrachen, ohne harte Ober- oder Untergrenze.
Bei niedrigen Spannungen sinkt der Wirkungsgrad, bei höheren Spannungen
steigen Drehzahlbedingte Probleme und Verluste: Eisenverluste, im
Extremfall droht sogar mechanische Zerstörung durch Fliehkräfte, und der
Controller muss ja mit der Kommutierung auch noch hinterherkommen. Bei
40 000 mechanischen Upm wären das immerhin schon 280 000 elektrischen
Umdrehungen, *6 (bei Blockkommutierung) = 1,7 Mio. Kommutierungen/min. =
36 µs pro Kommutierung für den steuernden Mikrocontroller.
sebastian schrieb:> Ich kann doch so mit der Kommutierung allein nicht auch noch den Strom> regeln, sondern nur irgendwie begrenzen.> Liege ich da richtig?
Durch die Kommutierung wird nicht der Strom geregelt, sondern der
Feldwinkel zwischen Rotorstellung und Magnetfeld. Der mechanische Winkel
wird gemessen (beim sensorlosen Motor mit Blockkommutierung i.d.R. durch
Messung der induzierten Spannung am stromlosen Anschluss) und der
Kommutierungszeitpunkt für die nächste Phase daraus abgeleitet.
Begrenzt wird (wenn überhaupt) unabhängig davon nur über die Spannug
bzw. PWM.
Hallo Thomas
Danke für deine Erklärungen, aber irgendwie verstehe ich überhaupt
nichts mehr und bin vollkommen verwirrt.
Ich weiss nicht, ob ich die Fragen falsch stelle oder das System so
kompliziert ist.
Wir haben doch gesagt, dass je nach dem wie die PWM ist, sich eine
gewisse Spannung Us einstellt. --> Damit regle ich doch die
Geschwindigkeit
Aber wer sagt mir nun, dass ich die Geschwindigkeit auch innerhalb einer
bestimmten Zeit erreiche? Denn der Strom wird ja nicht geregelt und
bekanntlich ist M = J*alpha. Das heisst, dass ich mich da auf den Motor
verlassen muss.
Jetzt nochmals zurück zu den Drehzahlen. Angenommen ich hätte eine
Polradspannung von 4.3V, sprich 10000 Umdrehungen.
Jetzt möchte ich kurzzeitig auf 20000 Umdrehungen und das aber innerhalb
einer vorgegebenen Zeit erreichen.
Wenn jetzt mit der PWM der Strom also nicht geregelt wird, sondern die
Spannung, habe ich also keinen Einfluss auf das Moment, sprich wie
schnell ich die gewünschte Drehzahl auch erreichen möchte.
Denn beim Gleichstrommotor geht es ja, einer Geschwindigkeitsregelung
ist eine Stromregelung unterlagert. Also wird dieses geregelt.
Wie darf ich mir das jetzt beim BLDC vorstellen? Das ist ja irgendwie
keine saubere Lösung?!
Nachtrag zum oberen Beitrag:
Worauf ich hinaus möchte ist auch, dass ich auf diese Weise ja auch gar
nicht weiss, was für ein Strom jedes Mal fliesst, wenn mal eine Last
dran hängt, die konstant ist.
Denn welche Spannung Up sich einstellt hängt ja auch von UR = Is * Rs
ab, sprich dem Verlust --> Up = Us-UR
Is .. Strom
Rs .. Innenwiderstand
Oder kann man sagen, dass bei einer bestimmten Trägheit/Last an der
Welle auch beim Beschleunigen immer der gleiche Strom fliesst? Macht
doch so auch keinen Sinn irgendwie. Das verstehe ich so leider einfach
nicht. Irgendwas fehlt mir da noch.
sebastian schrieb:> Wir haben doch gesagt, dass je nach dem wie die PWM ist,
???
Sprichst Du von einem BLDC oder einer Gleichstrommaschine?
Ein BLDC ist ein elektronisch kommutierter Synchronmotor;
der verträgt sich m.W. ganz schlecht mit PWM.
sebastian schrieb:> Denn beim Gleichstrommotor geht es ja, einer Geschwindigkeitsregelung> ist eine Stromregelung unterlagert. Also wird dieses geregelt.
Ich glaube, Du denkst irgendwie zu kompliziert...
Der BLDC Motor funktioniert im Prinzip genauso, wie ein Bürsten DC
Motor. Lediglich die Kommutierung wird technisch anders realisiert, aber
das Prinzip ist das gleiche. Beim BLDC wird das Umpolen an der Wicklung
(Kommutierung) elekronisch gemacht, beim Bürstenmotor mechanisch durch
Kollektor und Kohlebürsten.
Beim Bürsten-Gleichstrommotor muss ja auch nichts extra über den Strom
geregelt werden. Wenn man ihn an 6V anschließt, dreht er ungefähr halb
so schnell, wie an 12V, und je nach Last ändert sich die Stromaufnahme
und die Drehzahl bricht auch mehr oder weniger ein. Zu jeder angelegten
Spannung und mechanischer Belastung des Motors wird sich eine bestimmte
Drehzahl und Stromaufnahme einstellen, ganz ohne extra Regelung.
Einen Bürstenmotor kann man aber auch über PWM an einer konstanten
Spannungsquelle betreiben und so seine Drehzahl elektronisch steuern,
was auch der PWM beim BLDC entspricht.
Regeln bzw. begrenzen muß man den Strom ggf. nur, um evtl. unzulässig
hohe Ströme zu verhindern, die die FETs zerstören könnten. Beim
Anlaufen/Beschleunigen fließt natürlich kurz auch mal ein höherer Strom,
aber den vertragen die FETs im ESC in der Regel problemlos, da er ja nur
für Sekundenbruchteile auftritt und durch die unvermeidlichen Widertände
auch nicht unendlich hoch werden kann. Größere/bessere ESCs haben meist
irgendeine Form der Stromüberwachung drauf.
Meist wird die PWM im ESC auch nicht schlagartig auf einen hohen Wert
umgeschaltet, sondern ein "Sanftanlauf" verwendet. So hält sich die
Beschleungung und damit auch der Strom zur Überwindung der
Massenträgheit in Grenzen.
sebastian schrieb:> Worauf ich hinaus möchte ist auch, dass ich auf diese Weise ja auch gar> nicht weiss, was für ein Strom jedes Mal fliesst, wenn mal eine Last> dran hängt, die konstant ist.
Wenn Du eine bekannte mechanische Last hast, kannst Du über die
mechanische Leistung (Drehmoment x Drehzahl) unter Berücksichtigung des
Motor-Wirkungsgrads doch die elektrische Eingangsleistung, und damit
auch den Strom ausrechnen.
Possetitjel schrieb:> Ein BLDC ist ein elektronisch kommutierter Synchronmotor;> der verträgt sich m.W. ganz schlecht mit PWM.
Natürlich werden die über PWM gesteuert - wie soll man die Drehzahl
sonst einstellen?
perfekte Erklärung, jetzt habe ich da endlich mal verstanden.
Manchmal denke ich wirklich zu kompliziert..
Vielen Dank, jetzt komme ich vorerst einmal wieder weiter. ;)
Thomas E. schrieb:> Possetitjel schrieb:>> Ein BLDC ist ein elektronisch kommutierter Synchronmotor;>> der verträgt sich m.W. ganz schlecht mit PWM.>> Natürlich werden die über PWM gesteuert - wie soll man die> Drehzahl sonst einstellen?
Über die Frequenz des Drehfeldes?
Possetitjel schrieb:> Über die Frequenz des Drehfeldes?
Du verwechselst BLDC mit Schrittmotor. An der Frequenz kann man nichts
drehen, die hängt an den Nulldurchgängen der Back-EMF bzw der
Hall-Sensoren.
MfG Klaus
Hallo Thomas
Nach deinem Beitrag habe ich einmal versucht ein Modell des Motors zu
erstellen. Dabei bin ich auf das im Link unten verfügbare Modell
gekommen.
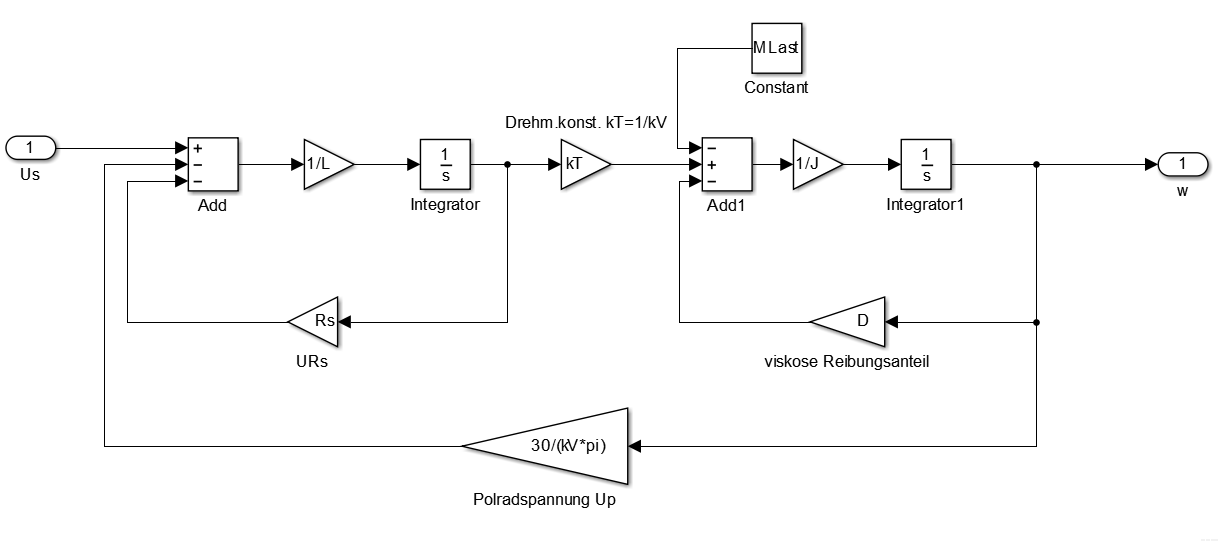
Dabei habe ich die folgenden physikalisch hergeleiteten Gleichungen
verwendet.
Ich habe zwar keine Angabe über die Induktivität, aber naja, ich
entschied mich mal zuerst das Modell "vollständig" zu machen.
Us - UR - UL - Up = 0
mit
Up = n/kv = 30*w/(pi*kv)
kT*kV = 1
UL = L* dIs/dt
UR = Rs*Is
mechanische Seite:
J*alpha = Mmotor - MReibungviskos
Mmotor = kT* Is
Mreib = D*w
Nach ein paar Zeilen Algebra folgendes Modell:
https://ufile.io/e2ikd
Ist das soweit korrekt? Es entspricht also nur einem Subsystem und ist
sozusagen die Regelstrecke.
Mir geht es im nächsten Schritt einmal die grobe Regelung zu verstehen,
sprich was der PID später der PWM übergibt. Im Netz habe ich zB eine
Regelungsart gefunden, die die Position als Sollgrösse vorgibt etc.
Dinge, die ich noch nicht so ganz nachvollziehen kann.
sebastian schrieb:> mechanische Seite:> J*alpha = Mmotor - MReibungviskos> Mmotor = kT* Is> Mreib = D*w
Da fehlt noch etwas Wesentliches, die Schwungmasse. Diese verhält sich
wie eine große Kapazität, bei der die Drehzahl der Spannung entspricht.
Jede Drehzahlerhöhung ist eine Belastung und erfordert einen hohen Strom
(wie Anlaufstrom). Eine schnelle Drehzahlverminderung braucht eine
Bremsung durch Aufnahme von Strom, der Motor wirkt dabei als Generator.
Jobst Q. schrieb:> sebastian schrieb:>> mechanische Seite:>> J*alpha = Mmotor - MReibungviskos>> Mmotor = kT* Is>> Mreib = D*w>> Da fehlt noch etwas Wesentliches, die Schwungmasse. Diese verhält sich> wie eine große Kapazität, bei der die Drehzahl der Spannung entspricht.>> Jede Drehzahlerhöhung ist eine Belastung und erfordert einen hohen Strom> (wie Anlaufstrom). Eine schnelle Drehzahlverminderung braucht eine> Bremsung durch Aufnahme von Strom, der Motor wirkt dabei als Generator.
Das J = Jges = JMotor+JLast
Ich hätte das auch so schreiben können:
JMotor * alpha_motor = M_motor - MReibung - MLast
oder direkt
JMotor * alpha_motor = M_motor - MReibung - J_Last * alpha motor
(JMotor+J_Last) * alpha_motor = M_motor - MReibung
Daher
J*alpha = Mmotor - MReibungviskos
Demnach müsste es so passen.
Jobst Q. schrieb:> sebastian schrieb:>> mechanische Seite:>> J*alpha = Mmotor - MReibungviskos>> Mmotor = kT* Is>> Mreib = D*w>> Da fehlt noch etwas Wesentliches, die Schwungmasse. Diese verhält sich> wie eine große Kapazität, bei der die Drehzahl der Spannung entspricht.>> Jede Drehzahlerhöhung ist eine Belastung und erfordert einen hohen Strom> (wie Anlaufstrom). Eine schnelle Drehzahlverminderung braucht eine> Bremsung durch Aufnahme von Strom, der Motor wirkt dabei als Generator.
Ich habe nochmals recherchiert. Du bist im Recht.
Die Gleichung ist somit:
J*alpha = Mmotor - MReibungviskos - MLast
Dann frage ich mich aber, was dann das J ist. Ich hätte nämlich gemeint,
dass das JMotor+JLast ist.
Ich muss nochmals nachhaken. Letztens bin ich etwas neben der Spur
gewesen. Natürlich muss neben dem Reibungsmoment und dem inneren Moment
des Motors auch ein Belastungsmoment vorhanden sein. Sonst hätte man ja
den Leerlauf. Das Modell wurde angepasst. (Anhang)
Nun zu meiner Frage:
Wenn ich nun eine Masse auf der Welle habe, sprich eine Trägheit, so
wirkt je nachdem wie schnell beschleunigt wird ein anderes Lastmoment.
Dieses wird ja sozusagen in der Regelungstechnik als Störgrösse
bezeichnet. Um dieses später in der Regelung zu berücksichtigen muss ich
diese Grösse messen.
Wie stellt man das an bzw. wie wird dieses Moment berücksichtigt?
Wenn ich das Trägheitsmoment nicht kenne, wie kann ich lediglich diese
Grösse messen?
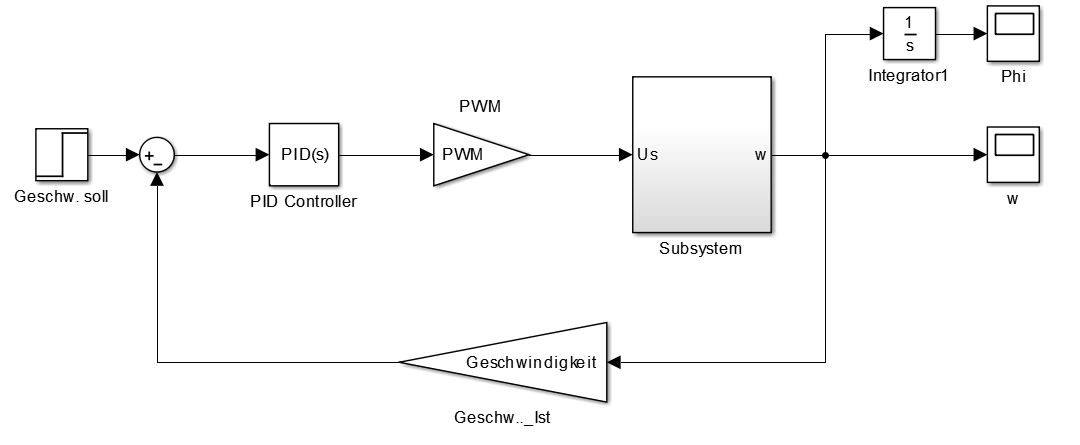
Andererseits habe ich nun auf diese Weise eine Regelstrecke des
BLDC-Motors. Nun habe ich im Netz eine Beschreibung gefunden, wie man
den Motor regeln könnte. Wenn eine Regelstrecke gegeben ist, dann kann
man den PID Regler darauf auslegen und die Koeffizienten bestimmten. Das
hätte ich auch getan, aber wie dem Bild simu2 zu entnehmen ist, hängt da
eine PWM dazwischen. Also kommuniziert der Regler direkt mit dem
PWM-Block.
Heisst das nun:
Die Regelstrecke benötigt als Eingangsgrösse Us, um die Geschwindigkeit
w am Ausgang einzustellen. Daher ist dafür eine bestimmte Spannung durch
die PWM erforderlich.
Diese Spannung erreicht man durch ein gewisses Tastverhältnis, die der
PWM übermittelt werden muss.
Nun kommt schon mein Verständnisproblem. Die Grösse, die der Regler mit
seinen Koeffizienten Kp, Ki, Kd am Ausgang ausgibt, ist doch kein
Tastverhältnis für die PWM.
Am Anfang als Sollgrösse gibt man doch eine Geschwindigkeit vor. Welche
Einheit hat diese Grösse? Letztenendes sind das irgendwelche Spannungen
nehme ich an, die zuvor umgerechnet wurden.
Könnte mich da vielleicht jemand einmal aufklären? Ich blicke da
irgendwie nicht so ganz durch.
Ich wäre euch sehr dankbar.
sebastian schrieb:> Nun kommt schon mein Verständnisproblem. Die Grösse, die der Regler mit> seinen Koeffizienten Kp, Ki, Kd am Ausgang ausgibt, ist doch kein> Tastverhältnis für die PWM.
Nee, aber es ist ein Zahlenwert als Stellgröße, z.B. eine Zahl zwischen
0 und 1. Das kann man ja auch leicht als 0..100% PWM-Duty definieren,
ergibt für den Motor dann eine Eingangsspannung zwischen 0 und voller
Versorgungsspannung. Ich würde die PWM einfach als Teil des Subsystems
betrachten, denn sie gehört ja eher zur technischen Realisierung, als
zur theoretischen Betrachtung der Regelstrecke.
sebastian schrieb:> Am Anfang als Sollgrösse gibt man doch eine Geschwindigkeit vor. Welche> Einheit hat diese Grösse?
Die Einheit, die Du für praktikabel hältst! Kann Umdrehungen pro Minute
sein, Radiant/Sekunde, Frequenz des el. Drehfelds in Hz, Geschwindigkeit
Deines Fahrzeugs in m/s oder km/h oder von mir aus auch in Angström pro
Jahr - reine Definitionssache!
Für die theoretische Betrachtung bietet sich wohl auch hier eine
abstrakte Größe in Form einer Zahl in einem bestimmten Intervall an
(z.B. zwischen 0 und 1, oder -1 und +1 wenn auch die Drehrichtung
berücksichtigt werden soll.
Thomas E. schrieb:>> Nach den Angaben handelt es sich vermutlich um einen Brushless-Motor, da> wird die Betriebsspannung nicht über nur einen MOSFET geschaltet,> sondern über min. 6 Stück davon (je 2 für jede Motor-Phase als> Halbbrücke). Die entsprechende Ansteuerschaltung dafür sollte auch den> Motorstrom überwachen und die FETs mit entsprechend angepasster PWM> ansteuern, damit sich der Strom auch im Anlauf-Fall oder bei blockiertem> Motor in Grenzen hält. Abgesehen davon verträgt der Motor für den> Sekunden-Bruchteil des Anlaufens auch deutlich mehr, als den angegebenen> maximalen "Burst"-Current.
Hallo
Ich bins wieder, von den Toten auferstanden ;)
Ich müsste nochmals zu den Mosfet eine Frage stellen.
Wenn ich die Steuerung der Mosfets PWM moduliere, stellt sich ja eine
Spannung und ein bestimmter Strom ein. Je nach dem, was ich messe, Strom
oder Spannung, stelle ich die PWM so ein, dass sich die gewünschte
Regelgrösse einstellt.
Liege ich da mit diesem Behauptung richtig?
Dann interessiert mich nochmals, warum denn sich der Strom auf 6 Mosfets
aufteilt und nicht auf 2. Denn bei der Kommutierung sind doch stets 2
durchgeschaltet. Es sei denn wird sind bei der Vektorregelung, dann sind
es 3 insgesamt, aber auch dann fliesst der Strom doch bei einem Mosfet
durch, der 2x so gross wie die anderen beiden.
Weiters hätte mich noch interessiert, warum denn die Induktivität des
Motors sich ändert und nicht konstant ist. Das habe ich versucht heraus
zu finden, war aber leider erfolglos. Es wurde immer nur behauptet, man
nehme an, dass die Induktivität konstant ist. Aber warum ändert sich die
Induktivität.
Ich hätte angenommen, dass diese immer gleich ist, denn wenn ich zB
einen Widerstand R und eine Induktivität L einbaue, ändern sich diese
Grössen ja auch nicht. Ich hätte jetzt nämlich nichts einzuwenden
gehabt, wenn es geheissen hätte, die Spannung UL ändert sich, da sich ja
der Strom auch ändert. Ich bitte um Aufklärung.
sebastian schrieb:> Ich bins wieder, von den Toten auferstanden ;)> Ich müsste nochmals zu den Mosfet eine Frage stellen.> Wenn ich die Steuerung der Mosfets PWM moduliere, stellt sich ja eine> Spannung und ein bestimmter Strom ein. Je nach dem, was ich messe, Strom> oder Spannung, stelle ich die PWM so ein, dass sich die gewünschte> Regelgrösse einstellt.> Liege ich da mit diesem Behauptung richtig?
Ja.
sebastian schrieb:> Dann interessiert mich nochmals, warum denn sich der Strom auf 6 Mosfets> aufteilt und nicht auf 2. Denn bei der Kommutierung sind doch stets 2> durchgeschaltet. Es sei denn wird sind bei der Vektorregelung, dann sind> es 3 insgesamt, aber auch dann fliesst der Strom doch bei einem Mosfet> durch, der 2x so gross wie die anderen beiden.
Weil du 6 hast und nicht 2?!
sebastian schrieb:> Weiters hätte mich noch interessiert, warum denn die Induktivität des> Motors sich ändert und nicht konstant ist. Das habe ich versucht heraus> zu finden, war aber leider erfolglos. Es wurde immer nur behauptet, man> nehme an, dass die Induktivität konstant ist. Aber warum ändert sich die> Induktivität.> Ich hätte angenommen, dass diese immer gleich ist, denn wenn ich zB> einen Widerstand R und eine Induktivität L einbaue, ändern sich diese> Grössen ja auch nicht. Ich hätte jetzt nämlich nichts einzuwenden> gehabt, wenn es geheissen hätte, die Spannung UL ändert sich, da sich ja> der Strom auch ändert. Ich bitte um Aufklärung.
Hystereseverluste beim ummagnetisieren sind proportional zur Frequenz.
Dazu kommt noch Stromsättigung.
Bei Blockkommutierung (ohne PWM Stromregelung) haben bldc Motoren einen
Arbeitspunkt, sprich eine Drehzahl mit guten Wirkungsgrad. Bei Langsamen
Drehzahlen glühen die Motoren (Festplatten, CD_Rom Laufwerk).
Die meisten Induktivitäten werden bei Sinusanregung von 1khz angegeben.
Man muss also immer ein Faktor 0.3...0.8 berücksichtigen. Mit einen Oszi
kann man den Stromanstieg ablesen: UL=L*di/dt
UL ist immer gleich da PWM!
aSma>> schrieb:
Hallo,
Vielen Dank für deine Erklärung
>> Weil du 6 hast und nicht 2?!>
Ja schon, aber es sind ja nur 2 durchgeschaltet und der Strom fliesst
nur durch 2 Mosfets und nicht 6 zugleich..
Knotenregel? Igesamt durch 2 Mosfets ergibt Igesamt/2 je Mosfet, die
durchgeschaltet sind.
Sonst könnte ich ja 30 Mosfets anschliessen und für die Leistungsbrücke
(nur 6 Mosfets) nutzen. Da ich 30 Mosfets habe, wäre der Strom dann auch
geringer und obwohl 24 Mosfets gar nicht geschaltet werden würden.. Das
macht ja kein Sinn. Was nicht genutzt wird, kann man ja auch nicht
mitrechnen.
>> Hystereseverluste beim ummagnetisieren sind proportional zur Frequenz.> Dazu kommt noch Stromsättigung.>> Bei Blockkommutierung (ohne PWM Stromregelung) haben bldc Motoren einen> Arbeitspunkt, sprich eine Drehzahl mit guten Wirkungsgrad. Bei Langsamen> Drehzahlen glühen die Motoren (Festplatten, CD_Rom Laufwerk).>> Die meisten Induktivitäten werden bei Sinusanregung von 1khz angegeben.> Man muss also immer ein Faktor 0.3...0.8 berücksichtigen. Mit einen Oszi> kann man den Stromanstieg ablesen: UL=L*di/dt>> UL ist immer gleich da PWM!
Das heisst aber, wenn ich eine bestimmte PWM frequenz wähle, stellt sich
eine bestimmte Induktivität ein. Aber dann ist diese ja konstant, da ja
die PWM-Frequenz gleich bleibt.
Und wieso ist UL immer gleich? Kann ja gar nicht sein, wenn I sich
ändert (di/dt) ??
Ich habe das noch nicht begriffen.
sebastian schrieb:> Ja schon, aber es sind ja nur 2 durchgeschaltet und der Strom fliesst> nur durch 2 Mosfets und nicht 6 zugleich..> Knotenregel? Igesamt durch 2 Mosfets ergibt Igesamt/2 je Mosfet, die> durchgeschaltet sind.>> Sonst könnte ich ja 30 Mosfets anschliessen und für die Leistungsbrücke> (nur 6 Mosfets) nutzen. Da ich 30 Mosfets habe, wäre der Strom dann auch> geringer und obwohl 24 Mosfets gar nicht geschaltet werden würden.. Das> macht ja kein Sinn. Was nicht genutzt wird, kann man ja auch nicht> mitrechnen.
Du musst eine komplette Periode betrachten und das mal 3. Du betrachtest
nur eine Kummutierung. Das geht so net.
http://i.imgur.com/F7Ifajs.png> Das heisst aber, wenn ich eine bestimmte PWM frequenz wähle, stellt sich> eine bestimmte Induktivität ein. Aber dann ist diese ja konstant, da ja> die PWM-Frequenz gleich bleibt.
Ja, in etwa.
> Und wieso ist UL immer gleich? Kann ja gar nicht sein, wenn I sich> ändert (di/dt) ??> Ich habe das noch nicht begriffen.
Mittels der PWM kann man sowohl die Amplitude als auch die Frequenz der
Sinuskommutierung beeinflussen.
Sorry für's Delay, habe auch ein paar Tage lang nicht mehr ins µC Forum
geschau.
sebastian schrieb:> Dann interessiert mich nochmals, warum denn sich der Strom auf 6 Mosfets> aufteilt und nicht auf 2.
Von einer solchen Aufteilung des Stroms habe ich ja auch nichts
geschrieben. Die 6 MOSFETs habe ich in dem frühen Post nur deshalb
erwähnt, weil ich dachte, daß Du den Motor evtl. nur über einen MOSFET
steuern wolltest (bzw. von einem Bürstenmotor ausgegangen bist). Mit
Deiner Aussage, daß ja immer nur je ein Highside- und ein Lowside MOSFET
gleichzeitig leitet und demnach der Strom immer durch genau zwei MOSFETs
fließt (und durch jeden natürlich dann jeweils auch der volle Strom),
hast Du natürlich Recht. Was sich aber tatsächlich aufteilt, ist die
durchschnittliche Verlustleistung pro FET. Bei diesem Parameter stößt
man in der Praxis auch viel eher an die Grenzen, als beim absoluten
Maximalstrom des FETs.
Blockkommutierung oder FOC (Feld-orientierte Steuerung) hat übrigens
nichts damit zu tun, ob die effektive Spannung über PWM gesteuertz wird.
PWM gibt es auch in Verbindung mit der Blockkommutierung.
sebastian schrieb:> Weiters hätte mich noch interessiert, warum denn die Induktivität des> Motors sich ändert und nicht konstant ist.
Die Induktivität wird, wie schon erwähnt, zum Teil durch Hysterese- und
Sättigungseffekte im Eisen beeinflusst. Neben dem Magnetfeld durch Strom
durch die Wicklung wird magnetischer Fluss im Stator auch noch durch die
Permanentmagneten des Rotors induziert. Außerdem ergibt sich ein mal
mehr und mal weniger geschlossener magnetischer Kreis, wenn sich der
Rotor dreht, was ebenfalls einen erheblichen Einfluss auf die
Induktivität hat. Bei einer Messung der Induktivität einer Wicklung
erhält man daher schon deutliche Variationen auch völlig ohne Bestromung
der Wicklung, einfach nur durch Änderung der Rotorstellung.
{kind=link}
{kind=link}