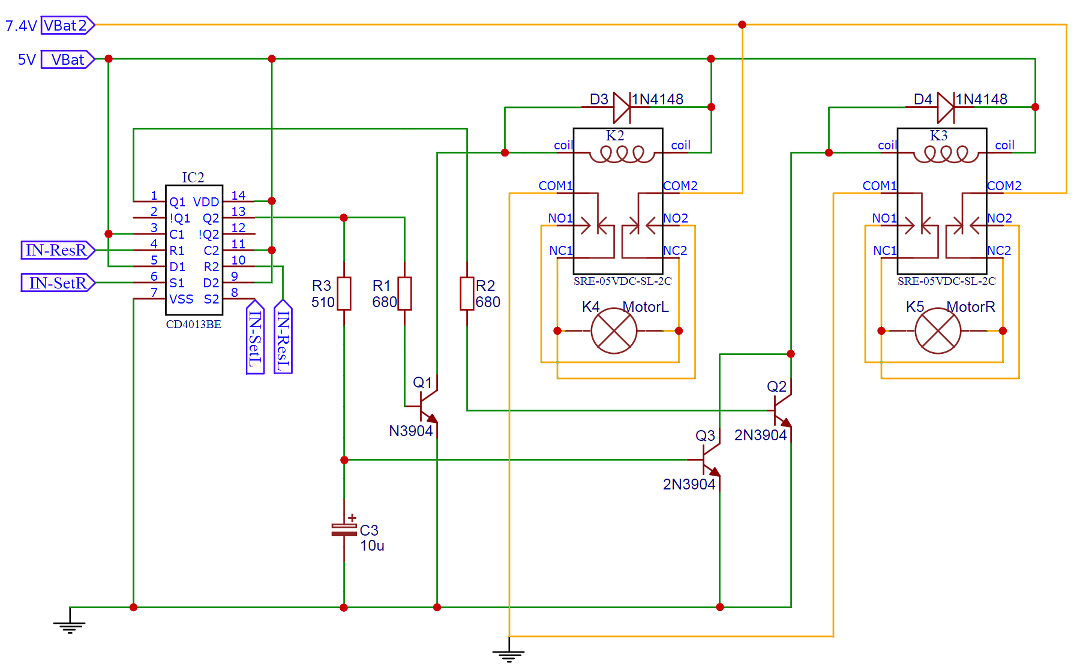
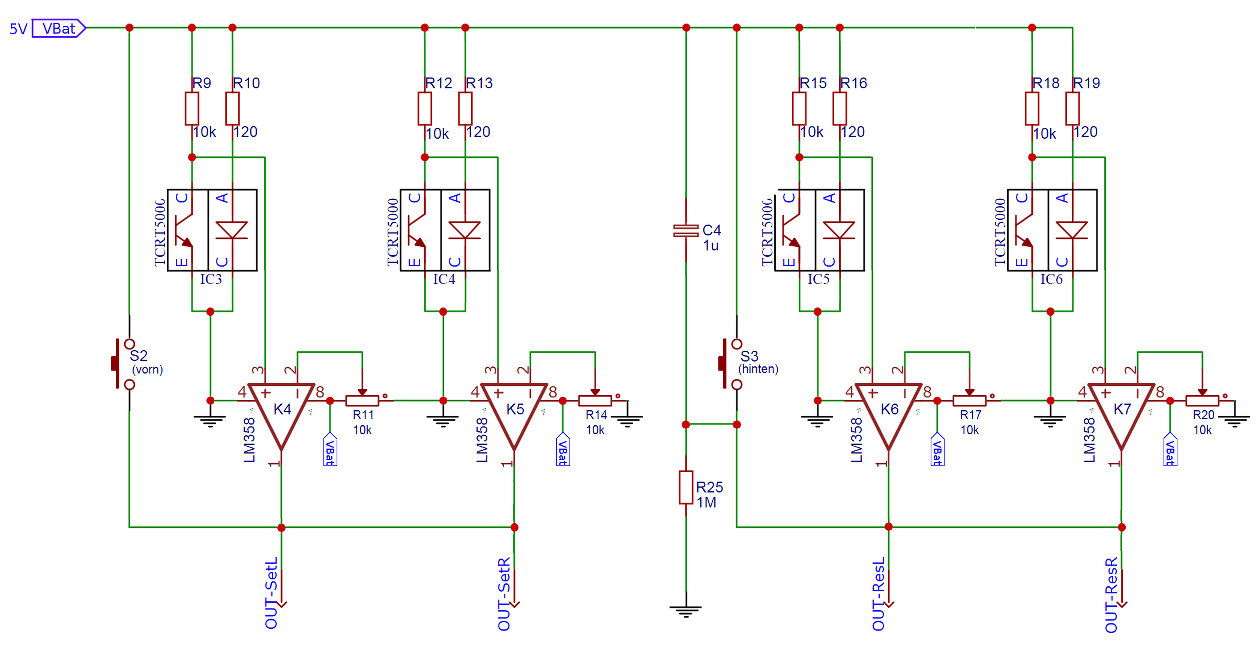
Hallo Ich möchte einen kleinen autonomen Roboter mit 2 Rädern bauen. Der Roboter soll keinen MP verwenden. Er wird folgende Sensoren haben: - 4 x TCRT5000 (Optischer Sensor mit Phototransistor): IC3, IC4, IC5, IC6 (vorne links, vorne rechts, hinten links, hinten rechts) - 2 x Hebeltaster: S2 und S3 (vorne und hinten) Der Roboter soll folgendes tun: - Anfangszustand: Der Roboter fährt vorwärts (dafür habe ich C1 eingebaut) - Wird der Hebeltaster S2 (vorne) aktiviert, fährt er nun rückwärts - Wird der Hebeltaster S3 (hinten) aktiviert, fährt er nun vorwärts - Erkennt der Sensor IC3 (vorne links) eine weisse Fläche, fährt nun das linke Rad rückwärts. Das rechte Rad soll ca. 10 ms später auch rückwärts fahren. - Erkennt der Sensor IC4 (vorne rechts) eine weisse Fläche, fährt nun das rechte Rad rückwärts. Das linke Rad soll ca. 10 ms später auch rückwärts fahren. - Dasselbe Prinzip soll mit den hinteren Sensoren IC5 und IC6 geschehen. Ich möchte folgendes von Euch wissen: - Sind Fehler im Schema? (ich bin absoluter Neuling was Elektronik angeht) - Wie erreiche ich, dass das zweite Rad jeweils 10 ms später dieselbe Fahrtrichtung wie das erste Rad einnimmt? Ich habe es mit einem RC-Glied versucht, siehe R3 und C3 im Schema, allerdings befürchte ich, dass dann nicht nur Q3 sondern auch Q1 verzögert wird...
Angehängte Dateien:
-

AnalogBot-MotorV2.png
71 KB -

AnalogBot-Sensors.png
110 KB
Tobi schrieb: > - Sind Fehler im Schema? (ich bin absoluter Neuling was Elektronik > angeht) Der garantierte Ausgangsstrom eines CD4013 liegt bei 5V Versorgung unter 2mA. Du versuchst ihn, mit 15mA zu belasten. http://www.ti.com/lit/ds/symlink/cd4013b.pdf
Wie schaltest du die Motoren denn mal aus? Ich sehe da zwar Polwende-, aber kein Abschaltrelais. Ein Motor kann es nicht besonders gut leiden, wenn man ihn aus vollem Lauf einfach umpolt. 10ms sind 1/100stel Sekunde. Bist du sicher, das das irgendwie bei einem mechanischen Fahrzeug relevant ist?
@Wolfgang Danke für den Hinweis! Ich werde R1, R2 und R3 auf 10kOhm erhöhen, somit ziehe ich aus einem Ausgang von CD4013 total nur noch 1mA (5V/10kOhm x 2). Sind 0.5mA genug um einen 2N3904 Transistor zu schalten? Ich habe nämlich grosse Mühe die Datenblätter zu verstehen, sei es nun vom CD4013 oder vom 2N3904. @Matthias S. Danke für die Hinweise! > Wie schaltest du die Motoren denn mal aus? Stimmt, auf meinem Schema fehlen die Schalter für die Batterien. > Ich sehe da zwar Polwende-, aber kein Abschaltrelais. Ein Motor kann es nicht besonders gut leiden, wenn man ihn aus vollem Lauf einfach umpolt. Da hast Du bestimmt Recht. Das bedeutet also zusätzlich 2 Relais, 2 Transistoren und 2 Widerstände, und 2 Kondensatoren für die Verzögerung. Hmmm... das wird ziemlich komplex. Wieviele Umpolungen aus vollem Lauf würden die Motoren mitmachen bevor sie Schaden nehmen? 1000+ Umpolungen wären für mich ok. Ich habe mich noch nicht auf einen Motor festgelegt, er soll aber folgende Eigenschaften haben: - Getriebemotor mit ca. 200 bis 400 rpm - Spannung zw. 6V und 12V (Die Spannungsversorgung werde ich wenn nötig anpassen) - Strom ohne Last zw. 40mA und 80mA - Blockierstrom < 1A (z.B. 500mA) > 10ms sind 1/100stel Sekunde. Bist du sicher, das das irgendwie bei einem mechanischen Fahrzeug relevant ist? Ich hatte folgendes gerechnet: - Radabstand: 9cm - Kreisumfang: 2*pi*4.5 = 28cm - Max. Geschw.: 50cm/s pro Rad (total 100cm/s wenn die Räder entgegengesetzt drehen) - Drehung pro s: 360*100cm/28cm = 1285° - Zeit für eine 13° Drehung: 1285°/13° = 0.01s
Tobi schrieb: > Hmmm... das wird ziemlich komplex. Hurra, du hast begriffen warum man solche Steuerungen nicht als TTL oder C-MOS Grab aufbaut, sondern mit einem programmierbaren Controller.
Tobi schrieb: > Hmmm... das wird ziemlich komplex. Und das wird bestimmt nicht das letzte mal gewesen sein, daß Du die Schaltung ändern und vergrößern mußt. Daher nimmt man besser einen MC, wo man nur Programmzeilen ändern oder hinzufügen muß.
Äxl (geloescht) schrieb: > S2 / S3 legt den Ausgang des LM358 "hart" auf VCC. Soll das so sein? Ja, die Tastschalter sollen den Ausgang des LM358 temporär umgehen. Sie bilden sozusagen ein OR mit dem LM358. ...ausser Du willst mir damit sagen, es brauche eine Diode am Ausgang des LM358. Das könnte natürlich gut sein. Aber wie gesagt, ich bin Anfänger. Der Andere schrieb: > Hurra, du hast begriffen warum man solche Steuerungen nicht als TTL oder C-MOS Grab aufbaut, sondern mit einem programmierbaren Controller. Peter Dannegger schrieb: >Und das wird bestimmt nicht das letzte mal gewesen sein, daß Du die Schaltung ändern und vergrößern mußt. > Daher nimmt man besser einen MC, wo man nur Programmzeilen ändern oder hinzufügen muß. Es ist mir schon klar, dass es wesentlich einfacher mit einem MC geht, ich programmiere selbst. Bis jetzt allerdings keine Roboter. Bevor ich einen Roboter mit MC programmiere, wollte ich als Einstieg einen einfachen "analogen" Roboter bauen, damit ich ein besseres Verständnis der Elektronik erwerbe. Vielleicht vergesse ich das lieber und benutze gleich einen MC. Mal sehn...
Tobi schrieb: > Bevor ich einen Roboter mit MC programmiere, wollte ich als Einstieg > einen einfachen "analogen" Roboter bauen, damit ich ein besseres > Verständnis der Elektronik erwerbe. Der dann alles anders macht wie von dir geplant oder aber gar nix macht, da deine Annahmen völlig unzureichend sind. Tobi schrieb: >> 10ms sind 1/100stel Sekunde. Bist du sicher, das das irgendwie bei einem > mechanischen Fahrzeug relevant ist? > Ich hatte folgendes gerechnet: > - Radabstand: 9cm > - Kreisumfang: 2*pi*4.5 = 28cm > - Max. Geschw.: 50cm/s pro Rad (total 100cm/s wenn die Räder > entgegengesetzt drehen) > - Drehung pro s: 360*100cm/28cm = 1285° > - Zeit für eine 13° Drehung: 1285°/13° = 0.01s Und du meinst, dass Relais exakt im ms Bereich geichmäßig öffnen und schliessen? Und dass der Getriebemotor mit einem unbekannten Trägheitsmoment (auch der angetriebenen Achse/Rad) plus der zu beschleunigenden Masse des gesamten Roboters in deutlich weniger als 1/100 Sekunde auf Höchstgeschwindigkeit bescheunigt und wieder abbremst? Ansonsten stimmt deine Rechnung so nicht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.