Guten Morgen,
ich versuche gerade die Implementierung des PID-Reglers aus der ARM
CMSIS DSP library zu verstehen. Beschrieben ist das Ganze hier:
https://www.keil.com/pack/doc/CMSIS/DSP/html/group__PID.html
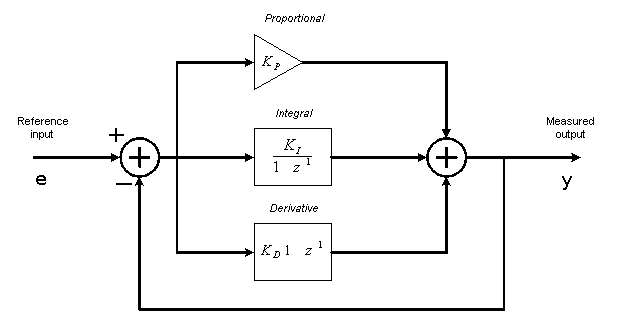
Zum ersten: Was will der Autor mit der Rückführung in dem Bild sagen?
Zum anderen: Wie passt das Bild mit der Implementierung zusammen?
Reglergleichung
P-Anteil:
Klar - es wird y_{n-1} addiert und sofort wieder abgezogen, damit man
für den I-Anteil den integrierten Regelfehler nicht als separate
Variable einführen muss.
I-Anteil:
Normal (bis auf dass die Zeitschrittweite in K_i eingerechnet ist).
D-Anteil:
oder
Was passiert hier? Es wird die Differenz der Differenz der letzten drei
Eingangswerte gebildet. Das sieht so nach zweiter Ableitung aus, die
aber für den D-Anteil nicht benötigt wird.
Grüße
W.T.
Nachtrag: Mit zwei Stunden Abstand ergibt sich doch ein Sinn:
Der D-Anteil läßt sich auch so schreiben:
Es ist also einfach der Differenzenquotient der letzten beiden
Eingangswerte gemeint. Und wie beim P-Anteil wird der D-Anteil des
letzten Schrittes, der in y_{n-1} noch drinsteckt, wieder abgezogen.
Ich habe keine Frage mehr. Ich lasse das hier aber trotzdem stehen,
falls irgendein Google-Sucher auf die gleiche Frage stößt.