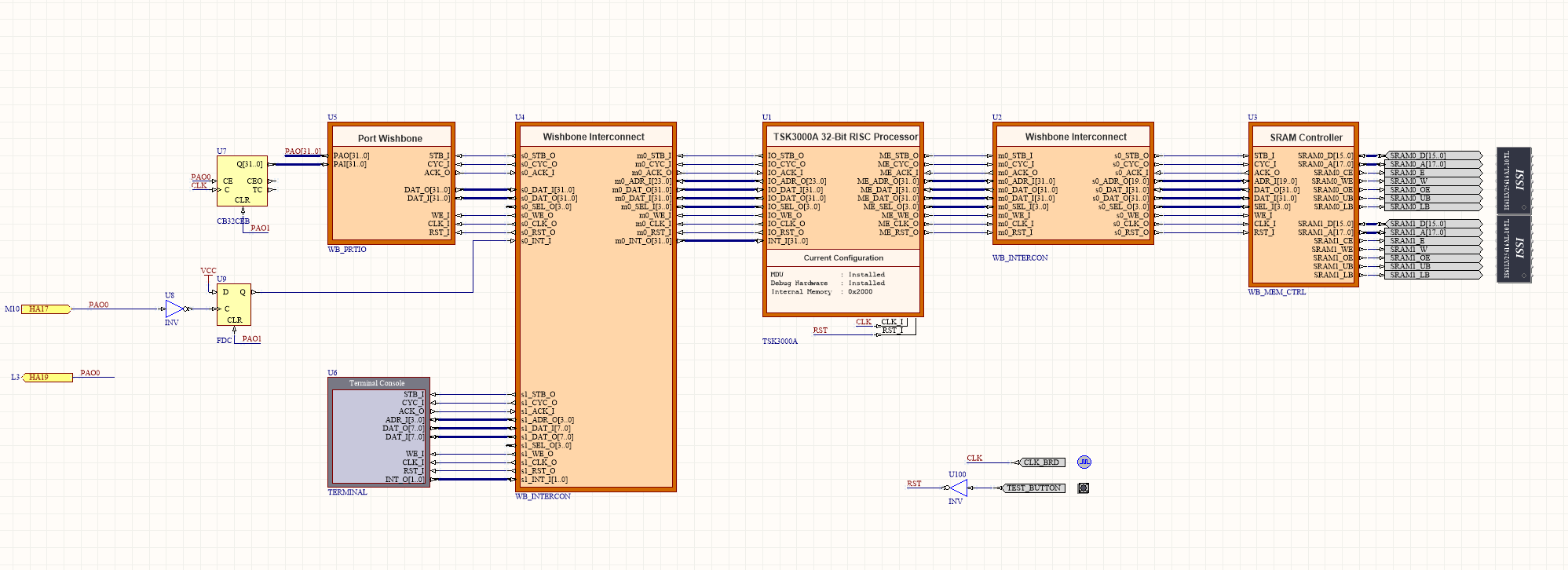
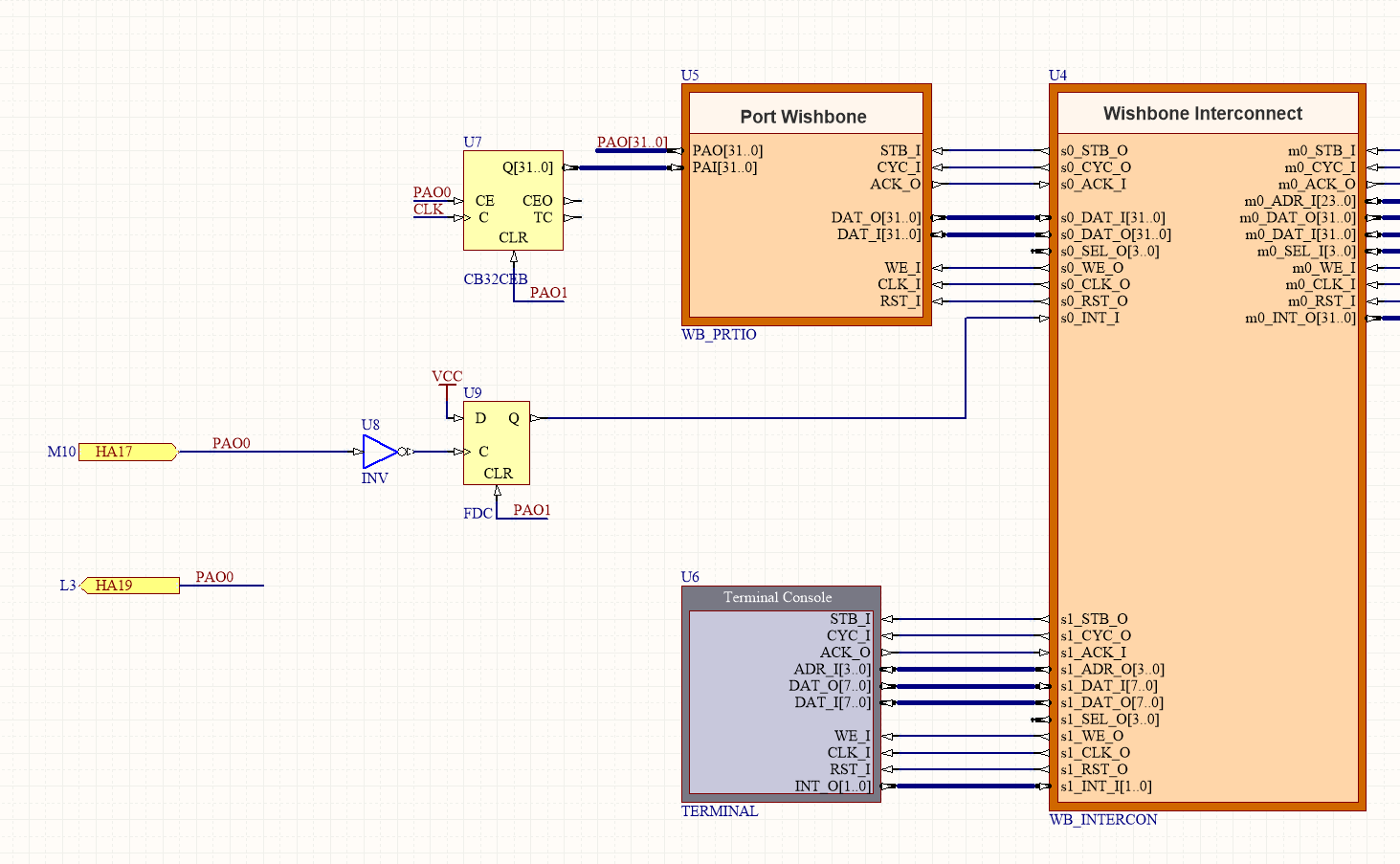
Moin zusammen! In meinem Studium zur Medizintechnik sollen wir im Praktikum zur Programmierung von Mikroprozessoren ein eigenes kleines Projekt mit Hilfe des Nanoboard 3000 und Altium Designer auf die Beine stellen. Mein Kommilitone und ich haben uns dazu entschlossen, mittels HC-SR04 Ultraschallsensors die Entfernung zu messen. Wahrscheinlich ganz simpel, aber wir hängen irgendwie fest und kommen nicht weiter. Anbei findet ihr die Schaltung, welche wir mit Hilfe unseres Professors (von ihm so auch abgesegnet) erstellt haben sowie den Programmcode in C. Wir sind beide keine erfahrenen Programmierer, also immer her mit konstruktiver Kritik :) Der US-Sensor ist direkt mit dem Nanoboard verbunden. PortA im Programm deckt sowohl den Trigger (Pin HA19 auf dem Nanoboard) auf als auch das Echo (Pin HA17 auf dem Nanoboard) ab. Zunächst setzen wir einen High Pegel auf PortA, damit der Trigger mit Spannung versorgt wird. Nach einem Delay von 12 µs geht PortA wieder auf Low, was gleichzeitig auch das Startzeichen für unser Echo ist, welcher dann auf High geschaltet werden soll. Der US-Sensor schickt Ultraschallwellen hinaus und wartet auf den Eingang selbiger nach der Reflexion an einem Objekt. Der Eingang der Reflexion soll einen Interrupt auslösen, wenn unser Echo auf Low geht. Im gleichen Augenblick möchten wir einen (laut Prof willkürlichen) Bitwert vom 32 Bit Zähler (CB32CEB) abholen und irgendwie als unsere Laufzeit nutzen, um dann so letztendlich die Entfernung zu erhalten. Inverter invertiert die fallende Flanke des Echos und setzt so CLR vom Flipflop auf High, wodurch der Zähler einen Reset erfährt und die ganze Prozedur wieder von vorne beginnt. Wird unser Programm auf das Nanoboard übertragen, erhalten wir keine richtigen Werte. Stets kommen 0 cm heraus oder das Programm bricht mitten im Ablauf ab. - Die Fragen, die wir uns stellen, haben wir den Sensor korrekt ins Schematic integriert? - Sind Trigger und Echo tatsächlich "nur" PortA? - Ist der Interrupt korrekt eingebunden? - Wie können wir den Bitwert in einen Zeitwert umrechnen? Geht das überhaupt? Wir hoffen, Ihr habt vlt. eine Idee oder Tipps, wie wir dieses Projekt endlich ans Ziel bringen können! Vielen Dank schon mal! Alex
Angehängte Dateien:
Alex schrieb: > Der US-Sensor schickt Ultraschallwellen hinaus Tut er das? Wird der Sender angesteuert? > Der Eingang der Reflexion soll einen Interrupt auslösen, > wenn unser Echo auf Low geht. Tut es das? > C-Programm_US_Messung.PNG Poste Sourcecode doch bitte wie in der Bedienungsanleitung über jeder Eingabebox beschrieben mit [c] Tags eingerahmt oder als C-Datei im Anhang...
Muss das mit CPU und C abgefeiert werden? Für mich sieht das nach wenigen Zeilen VHDL aus. Eigentlich muss doch nur der Dutycycle einer PWM erkannt werden.
Gustl B. schrieb: > Für mich sieht das nach > wenigen Zeilen VHDL aus. Nicht nur für Dich :-) Aber der TO schreibt, dass es im Praktikum um Mikroprozessortechnik geht. Wenn die Laufzeit immer als 0 ms gemessen wird, dann gibt es die folgenden grundsätzlichen Fehlermöglichkeiten: - Signal "Echo" ist nicht oder falsch verdrahtet: mit Oszi oder DMM messen - der Interrupt wird nicht korrekt konfiguriert, erzeugt oder verarbeitet: Handbuch TSK300A konsultieren - das Timing stimmt nicht, siehe nächsten Absatz. Zum Timing siehe: http://www.mikrocontroller-elektronik.de/ultraschallsensor-hc-sr04. Demnach dauert es nach dem Trigger-Puls nochmal 250 us, bis der US-Burst ausgelöst wird, dieser dauert dann 200 us, danach geht der Echo-Pegel solange auf High, bis das Echo eintrifft ist oder 200 ms überschritten wurden. Diesen Ablauf finde ich im C-Code nicht wieder - möglicherweise, weil ich mit dem verwendeten MC nicht vertraut bin.
Die Treiber die für den HC-SR04 im Netz kursieren sind wirklich schlimm geschrieben. kA, wie die Leute es schaffen 300 Zeilen Quellcode dafür zu investieren. Versuch mal meine Variante, habe alles erklärt mit der Timer-Konfig und die nötigen Funktionen, musst du nur auf deine Zielhardware ummünzen: https://sebastianfoerster86.wordpress.com/2016/10/22/hc-sr04-driver/ Vorteile: - nicht blockierend - Rechenzeit schonend - Fehlertolerant, falls mal ein Signal nicht zurück kommt (fehlt bei so vielen Treibern) - leicht zu portieren VG Basti
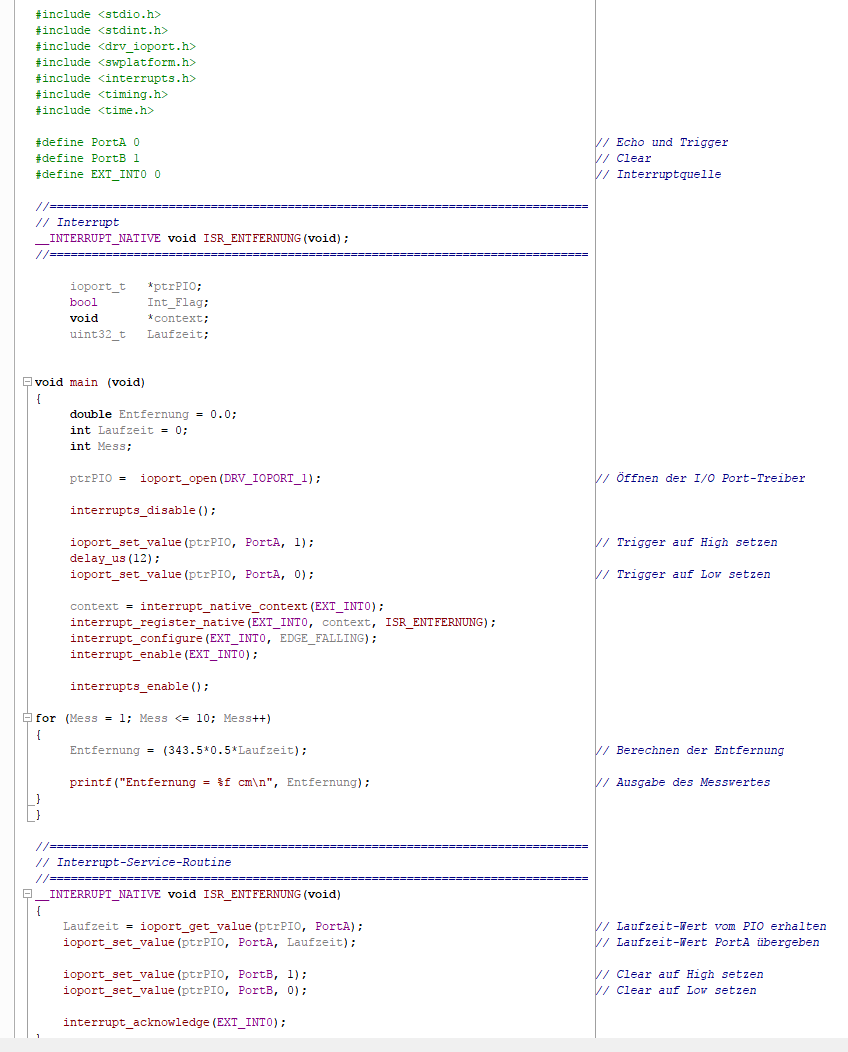
Moin! Danke für die schnellen Reaktionen :) Lothar M. schrieb: >> C-Programm_US_Messung.PNG > Poste Sourcecode doch bitte wie in der Bedienungsanleitung über jeder > Eingabebox beschrieben mit [ c ] Tags eingerahmt oder als C-Datei im > Anhang... Hier ist der C-Code im korrekten Format:
1 | //============================================================================
|
2 | // C-Programm zur Ultraschallentfernungsmessung
|
3 | //============================================================================
|
4 | |
5 | #include <stdio.h> |
6 | #include <stdint.h> |
7 | #include <drv_ioport.h> |
8 | #include <swplatform.h> |
9 | #include <interrupts.h> |
10 | #include <timing.h> |
11 | #include <time.h> |
12 | |
13 | #define PortA 0 // Echo und Trigger
|
14 | #define PortB 1 // Clear
|
15 | #define EXT_INT0 0 // Interruptquelle
|
16 | |
17 | //============================================================================
|
18 | // Interrupt
|
19 | __INTERRUPT_NATIVE void ISR_ENTFERNUNG(void); |
20 | //============================================================================
|
21 | |
22 | ioport_t *ptrPIO; |
23 | bool Int_Flag; |
24 | void *context; |
25 | uint32_t Laufzeit; |
26 | |
27 | |
28 | void main (void) |
29 | {
|
30 | double Entfernung = 0.0; |
31 | int Laufzeit = 0; |
32 | int Mess; |
33 | |
34 | ptrPIO = ioport_open(DRV_IOPORT_1); // Öffnen der I/O Port-Treiber |
35 | |
36 | interrupts_disable(); |
37 | |
38 | ioport_set_value(ptrPIO, PortA, 1); // Trigger auf High setzen |
39 | delay_us(12); |
40 | ioport_set_value(ptrPIO, PortA, 0); // Trigger auf Low setzen |
41 | |
42 | context = interrupt_native_context(EXT_INT0); |
43 | interrupt_register_native(EXT_INT0, context, ISR_ENTFERNUNG); |
44 | interrupt_configure(EXT_INT0, EDGE_FALLING); |
45 | interrupt_enable(EXT_INT0); |
46 | |
47 | interrupts_enable(); |
48 | |
49 | for (Mess = 1; Mess <= 10; Mess++) |
50 | {
|
51 | Entfernung = (343.5*0.5*Laufzeit); // Berechnen der Entfernung |
52 | |
53 | printf("Entfernung = %f cm\n", Entfernung); // Ausgabe des Messwertes |
54 | }
|
55 | }
|
56 | |
57 | //============================================================================
|
58 | // Interrupt-Service-Routine
|
59 | //============================================================================
|
60 | __INTERRUPT_NATIVE void ISR_ENTFERNUNG(void) |
61 | {
|
62 | Laufzeit = ioport_get_value(ptrPIO, PortA); // Laufzeit-Wert vom PIO erhalten |
63 | ioport_set_value(ptrPIO, PortA, Laufzeit); // Laufzeit-Wert PortA übergeben |
64 | |
65 | ioport_set_value(ptrPIO, PortB, 1); // Clear auf High setzen |
66 | ioport_set_value(ptrPIO, PortB, 0); // Clear auf Low setzen |
67 | |
68 | interrupt_acknowledge(EXT_INT0); |
69 | }
|
Burkhard K. schrieb: > Wenn die Laufzeit immer als 0 ms gemessen wird, dann gibt es die > folgenden grundsätzlichen Fehlermöglichkeiten: > > - Signal "Echo" ist nicht oder falsch verdrahtet: mit Oszi oder DMM > messen - Die Verdrahtung haben wir mehrmals überprüft. Die Kontrolle per Oszi haben wir nur am Anfang des Projekts gemacht. Zu dem Zeitpunkt war aber alles korrekt. Trigger und Echo waren klar zu erkennen. Werden die Verbindungen noch mal per Oszi prüfen. > - der Interrupt wird nicht korrekt konfiguriert, erzeugt oder > verarbeitet: Handbuch TSK300A konsultieren - Davon gehe ich auch aus. Der Interrupt soll bei fallender Flanke auslösen für PortA. Da über PortA sowohl Trigger als auch das Echo Signal läuft, woher weiß mein Interrupt, dass ich die fallende Flanke vom Echo Signal meine? Die Handbuch-Lektüre werde ich nochmal genauer konsultieren. > - das Timing stimmt nicht, siehe nächsten Absatz. - Wir waren der Meinung, dass der Delay von 250 µs bis zum Echo Burst nicht im Programmcode behandelt werden braucht. Läuft es nicht quasi in der internen Steuerung vom Sensor praktisch automatisch ab? Wir haben uns da an diversen Arduino Projekten orientiert mit dem gleichen Sensortyp. In den entsprechenden Programmcodes finden die 250 µs auch keine Erwähnung. Siehe bspw. hier: https://developer-blog.net/ultraschall-sensor-software/ Basti schrieb: > Versuch mal meine Variante, habe alles erklärt mit der Timer-Konfig und > die nötigen Funktionen, musst du nur auf deine Zielhardware ummünzen: - Danke dafür, das werden wir machen:) Nächste Woche Mittwoch sind wir wieder im Labor und können versuchen, eure Ratschläge umzusetzen! VG Alex
Oh Alex schrieb: > Moin! > > Danke für die schnellen Reaktionen :) > Hey Alex Ich glaube wir sind einer deiner Nachfolger und stehen vor dem gleichen Problem. Ist es möglich, dass du den vollständigen und richtigen C-Code für das Nanoboard 3000 hier nochmal reinstellen könntest? Mit freundlichen Grüßen Marlin
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.