Hallo, ist mein erster Beitrag hier. Ich habe diesen Regler und will eine beheizte Gärkammer damit regeln. Aber, zum Teufel, ich komme mit der Programmierung einfach nicht zurecht. Zweimal hier, dreimal da drücken fünfmal rauf und dann wieder bestätigen....das Ding bringt mich zur Verzweiflung. Und weit und breit im Web keine deutsche Anleitung. Ich hätte nicht gedacht, daß mich so ein einfaches Teil wie ein Thermostat vor solche Probleme stellt. Kann jemand hier eine zusammenhängende Beschreibung, wie man diesen Regler anschließt und einstellt abgeben? Dazu kommt noch, daß ich den Regler im bundle mit einem Fühler und einem SSR-Relais gekauft habe. Ich hab zu dem Thema im Web immer nur Fragmente entdeckt, die mich dann aber noch mehr verwirren. Der Regler wird aber oft bei kleineren Projekten eingesetzt, wie ich via Google und Anfragen von anderen Käufern bei Amazon erfahren habe. Ich wäre demjenigen, der mich zu einem treffenden Beitrag führt oder mir gleich selbst hilft, wirklich dankbar. REX-C100FK04-V 0-999°C Output SSR Gruß vom Dieter
Hallo, deine Anhänge sind sind kaum nutzbar, weil kein Dateityp vorhanden. Wie wäre es denn damit: https://www.rkcinst.co.jp/english/pdf_manual/imnzc22e1.pdf Gruß Öletronika
Angehängte Dateien:
-

Regler_fuer_Gaerkammer.jpg
150 KB

Hallo zurück und danke für Deine Mühe. Dein PDF hatte ich allerdings schon. Das wirft für mich aber mehr Fragen auf, als es beantwortet. Ich bräuchte eine Step-byStep Anweisung für die Grundeinstellung und die Veränderung der einmal eingestellten Temperatur. Leider bekommt man ja kaum noch Analogregler mit Poti, die man einfach nur anschließt und dann mit einem simplen Stellrad einstellt. Ohne den ganzen Menü-Pipifax mit tausend Einstellmöglichkeiten, die gleichzeitig ebensoviele Fehlermöglichkeiten beinhalten. Ich hab nun das Bild aus dem Eingangsbeitrag nochmal hochgeladen. Hoffentlich kann man es jetzt sehen.
Gert G. schrieb: > Leider bekommt man ja kaum noch Analogregler mit Poti, die man einfach > nur anschließt und dann mit einem simplen Stellrad einstellt. Die werden nach wie vor millionenfach hergestellt, für alle möglichen Temperaturbereiche. Gert G. schrieb: > Ohne den ganzen Menü-Pipifax mit tausend Einstellmöglichkeiten, Also ein Auto nur mit Gaspedal...
Dem Bild nach ist dein Regler ein chinesischer Nachbau des Originals aus Japan. Da stellt sich dann gleich die Frage, ob die Funktionalität auch identisch zum Original ist, welche in der oben verlinkten Anleitung beschrieben wird. Hast du keinerlei Anleitung dazu bekommen? Ich habe auch einen Nachbau, und da weicht schon mal die Anschlussbelegung vom Original ab, und dazu gab es ein A4 Blatt als Anleitung. Also Achtung beim anschliessen! Mein Regler hat seitlich einen Aufkleber mit der Anschlussbelegung. Ich habe auch im Internet nach einer vernünftigen Anleitung gesucht, und bin auf folgender Seite fündig geworden http://www.fmfranklin.com.au/products/rkc.html Da kannst du ein "REX-C100 Instruction Manual" herunterladen. Das ist zwar auch keine deutsche Anleitung, aber die Beschreibung ist in einem verständlichen Englisch gehalten. Z.B. Seite 7 - Änderung der Soll-Temperatur (= SV) - kurz die Taste SET drücken -> letzte Ziffer von SV leuchtet heller - mit Pfeiltaste UP oder DOWN den eingestellten Wert ändern - zum Abschluß wieder kurz SET drücken Wem es zu mühselig ist, den Wert in Einerschritten einzustellen, der kann mit der horizontalen Pfeiltaste die Dezimalstelle auswählen die geändert werden soll. Auf diese Art funktionieren alle weiteren Einstellungen. Es gibt auf der Seite auch noch ein "REX-C100 Initial Setting Manual". Da würde ich am Anfang aber die Finger davon lassen, denn damit kann man einiges kaputt machen. Das Bild das du hochgeladen hast ist vermutlich ein Kopie des Angebots. Stimmt die Rückseite deines Reglers mit diesem Bild überein?
Servus miteinand, habe erworben ebenfalls den REX C-100FK02 V*AN DN und die Einstellungen zur Soll - und Ist Temperatur klappt gut. Der Regler soll meine Temper-Box für meine mit Epoxyd gebauten Modellflugzeuge die Temperatur Regeln. Nach dem R&G (Harzhersteller) Handbuch werden dort sechs Glühlampen a 100W eingesetzt. Das Aufheizen klappt sehr gut und auch das halten der Temperatur klappt. Leider muss ich eine deutlich langsamere Aufheiz-Kurve fahren, d.h. max. 10°C pro Stunde auf 60°C in 6 Stunden. Nun meine Frage: Lässt sich bei dem REx C-100 die abzufahrende Rampe (Steigung über die Zeit) anpassen? Habt Ihr einen Tip welche Paramterfelder ich wie setzen muss? Falls der Regler keine anpassbare Rampenfunktion unterstützt, habt Ihr einen Tipp für mich zu einem ähnlich günstigen Regler mit eben dieser Funktion? Sers der Maxi
Maxim schrieb: > Nun meine Frage: Lässt sich bei dem REx C-100 die abzufahrende Rampe > (Steigung über die Zeit) anpassen? Habt Ihr einen Tip welche > Paramterfelder ich wie setzen muss? Derivative time
Maxim schrieb: > Falls der Regler keine anpassbare Rampenfunktion unterstützt, Tut er. https://www.rkcinst.co.jp/english/pdf_manual/imnzc22e1.pdf P Anteil, I Anteil, D Anteil sind jeweils einzeln einstellbar. Ein D-Glied solltest du vernichten. geringer P-Anteil. und eine laaaangsamen I-Anteil. Das kann man ausrechnen: https://de.wikipedia.org/wiki/Regler Wenn du aber das Stellglied "Heizung" einfach nur An-Aus schaltest (Relaisausgang) anstatt einer mittels externem des Triac das stetig zu fahren, dann wird das schwierig. Hier könte es helfen dein Medium vor den Strahlen der Heizstrahler zu schützen um das ganze etwas stetiger zu machen.
Sebastian L. schrieb: >> Falls der Regler keine anpassbare Rampenfunktion unterstützt, > Tut er. > https://www.rkcinst.co.jp/english/pdf_manual/imnzc22e1.pdf Die Manuals von rkc haben einen neue Heimstatt gefunden: https://www.rkcinst.co.jp/english/download-center/?dc_cat=15 Da findet sich dann auch der REX-C100 (und Konsorten). FWIW.JFYI ... ;) Gruß, U.
Hallo und guten Tag, bin neu hier und hänge mich mal in dieses Thema rein. Betriftt eigentlich genau mein Problem. Vorab kurz etwas zu meiner Person. Bin mittlerweile über 65 Jahre und somit nicht mehr der Frischeste. Mit elektronischen Basteleine beschäftige ich mich zwar seit Jahrzehnte aber nur hin und wieder. Auf der Höhe der Zeit bin ich definitiv nicht. Die vorgenannte Bedienungsanleitung (sogar in Deutsch) liegt vor , ebenso die das "Initial Setting Manual" (leider nur in Englisch). Mein Problem ist folgendes. Meinen Minibackofen hab ich mit einer Rex c100 ausgerüstet.Schaltung der Heizung erfolgt mit einer SSR-40DA.Funktioniert sehr gut. Nur fährt der am Anfang leider sehr über die eingestellte Temperatur hinaus. Beispiel: Hab 60 grd eingestellt , er fährt bis auf 75 grd hoch und pegelt das dann auf 60 grd ein. Diese Temperatur hält er dann stabil. Wenn ich das richtig gelesen habe ist das ja ein typisches Regelverhalten von einer PID-Regelung. Kann man das nun noch etwas ändern. Weiter vorn wurde das Stichwort "Derivative Time" genannt. Geht das in die richtige Richtung. Bin an diesem Punkt leider völlig blind. Könnt ihr einen Tip geben an welcher Stellschraube ich eventuell drehen könnte. Möglichst mit einer Verweis auf die Position in den Anleitungen.
Nachstellzeit. Bei den Eurotherm mit denen ich früher zu tun hatte, war das der Parameter Nachstellzeit. Diese beschreibt den Nachlauf der Temperatur wenn der Sollwert erreicht wird. Wie dieser beim hier beschriebenen Regler lautet kann ich dir nicht sagen.
Angehängte Dateien:
-

rex-c100.png
680 KB
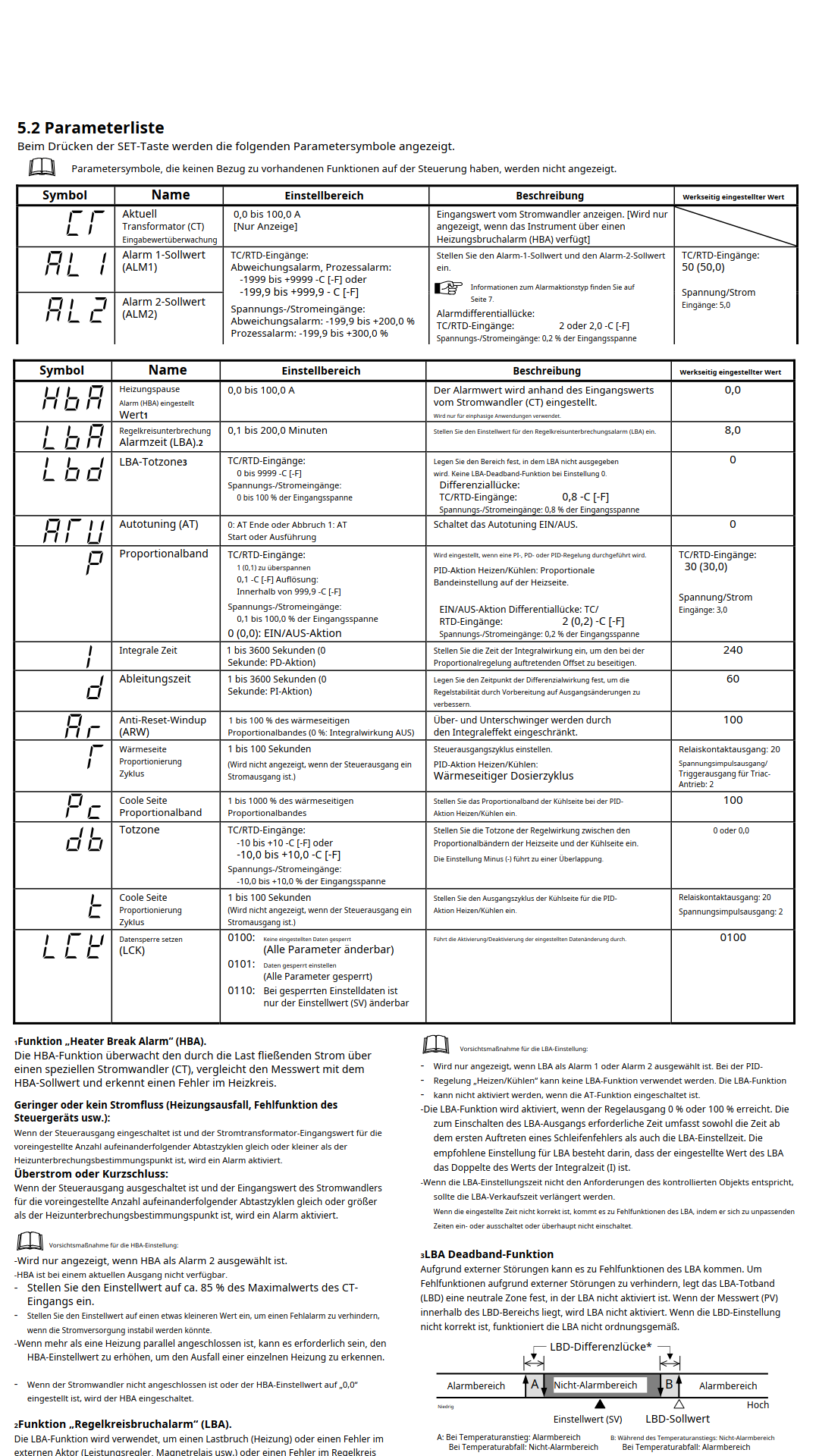
Armin X. schrieb: > Nachstellzeit. > ..... > Wie dieser beim hier beschriebenen Regler lautet kann ich dir nicht > sagen. Danke. Sollte eigentlich auch bei diesem Regler zur Verfügung stehen. Mal sehen ob ich da was finde. Der Begriff Nachstellzeit taucht schon mal in der Anleitung nicht auf.
Angehängte Dateien:
-

rex-c100.png
680 KB
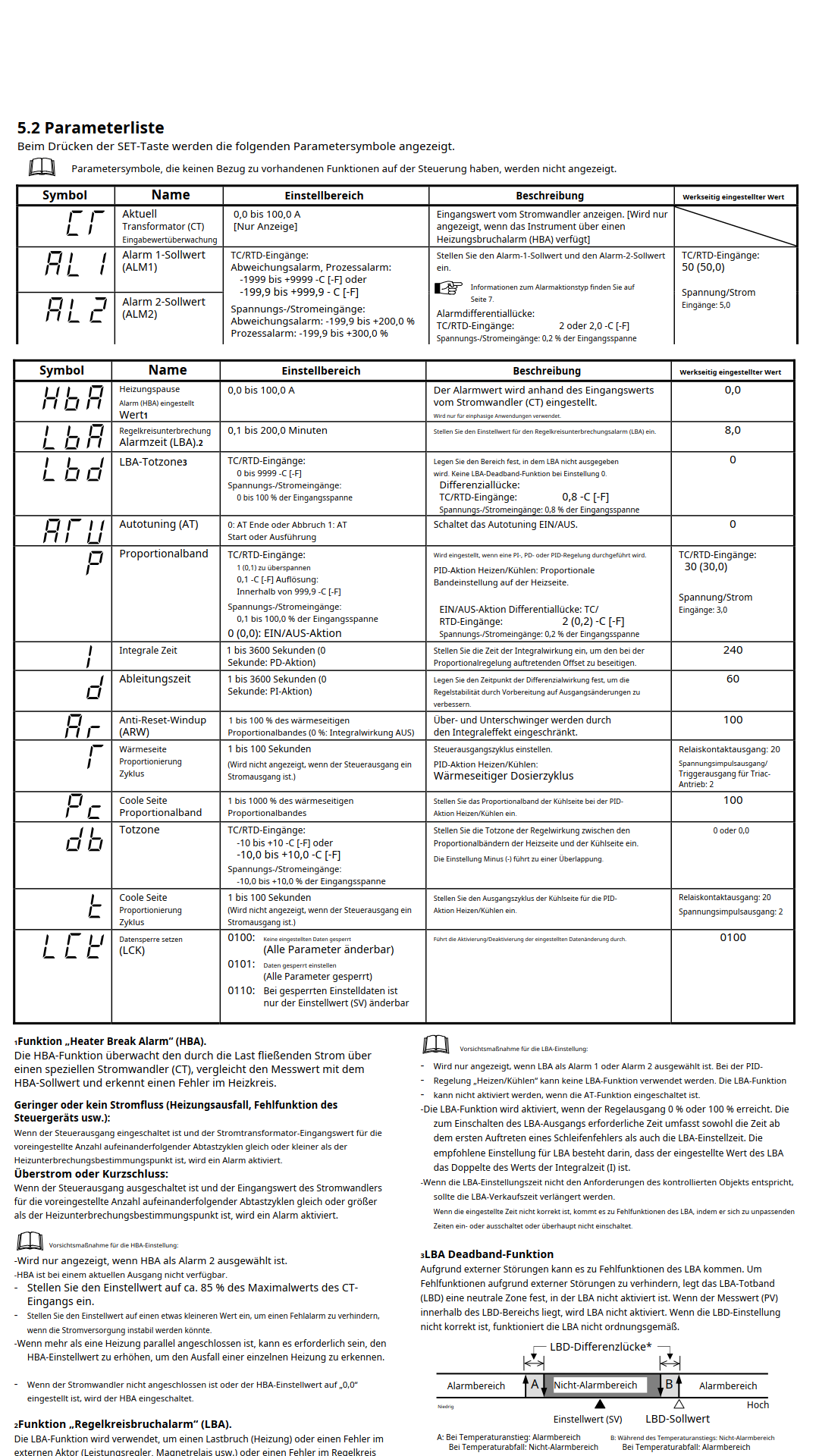
Hab mal einen Ausschnitt der Anleitung gemacht. Vermute mal ,dass man mit diesen Parametern was machen kann . Nur welchen Parameter in welche Richtung verstellen. Keine Ahnung.
Hab grad mal über die Parameter drübergeschaut. Der Regler hat eine Autotunefunktion. Starte die mal. Damit dürften die übelsten Schwinger eliminiert sein.
also der hinweis autotune bringt erkenntnistechnisch mal wieder gar nichts, aber ja danke für den hinweis. ich habe das verstehen der rex-c100 ziemlich aufgegeben, ich versteh das einfach nicht. ich dachte bei meiner heizplatteregelung ich könnte auch einen fixen pulsmodus (zb 2 sek an, 8 sek aus) einstellen, habe ich nicht hingekriegt. auch überschwinger vermeiden, keine ahnung, aber ja, die angepeilte temperatur wird irgendwann erreicht und gehalten, funktioniert irgendwie, emv-verträglich noch dazu. ich verstund falsch das proportionalitätsband P wäre der tastgrad an/aus-zeiten. und integrale zeit I die vorgesehene zeit für das erreichen der zieltemperatur ..... . ja nee, jetzt sehe ich den englischen wikipedia-artikel https://en.wikipedia.org/wiki/Proportional%E2%80%93integral%E2%80%93derivative_controller und kriege ein ganz anderes verständnis dazu. hoffentlich. zitat : Proportional The obvious method is proportional control: the motor current is set in proportion to the existing error. However, this method fails if, for instance, the arm has to lift different weights: a greater weight needs a greater force applied for the same error on the down side, but a smaller force if the error is low on the upside. That's where the integral and derivative terms play their part. Integral An integral term increases action in relation not only to the error but also the time for which it has persisted. So, if the applied force is not enough to bring the error to zero, this force will be increased as time passes. A pure "I" controller could bring the error to zero, but it would be both slow reacting at the start (because the action would be small at the beginning, depending on time to get significant) and brutal at the end (the action increases as long as the error is positive, even if the error has started to approach zero). Applying too much integral when the error is small and decreasing will lead to overshoot. After overshooting, if the controller were to apply a large correction in the opposite direction and repeatedly overshoot the desired position, the output would oscillate around the setpoint in either a constant, growing, or decaying sinusoid. If the amplitude of the oscillations increases with time, the system is unstable. If they decrease, the system is stable. If the oscillations remain at a constant magnitude, the system is marginally stable. Derivative A derivative term does not consider the magnitude of the error (meaning it cannot bring it to zero: a pure D controller cannot bring the system to its setpoint), but the rate of change of error, trying to bring this rate to zero. It aims at flattening the error trajectory into a horizontal line, damping the force applied, and so reduces overshoot (error on the other side because of too great applied force). zitat ende. es ist also eine ganz abstrakte kiste wo man anscheinend nichts direkt vorgeben kann, sondern alles wird intelligent geregelt : proportionalband P, auf die abweichung vom sollwert wird proportional reagiert, oder eben hier einstellbar in prozent gedrosselt. intergrale zeit I, je länger eine sollwertabweichung andauert, um so stärker wird dagegen gesteuert. ob der einstellbare zeitwert hier einen wirkungsdelay setzt oder ein zeitfenster in dem die sollwertabweichung geplanterweise korrigiert sein soll, wer weiß ? ich glaube letzteres, denn je länger desto overshoot. oder das verhältnis zeit der sollwertabweichung zu zeitlimitbasis der gegensteuerung, also ein wirkungsfaktor ? k.a. ableitungszeit d (deriative), der intelligente faktor wie mir scheint, denn der trend der sollwertabweichung wird erkannt und versucht ein überschießen zu vermeiden dämpfung. die sollwertabweichungs-änderungsrate soll null werden. was aber soll hier der zeitwert sein ? das zeitfenster zur bestimmung der änderungsrate ? ein delay ? ein zeitlimit für die dämpfungskorrektur ? der p-faktor ist nicht zeitbestimmt, sondern abweichungsbestimmt, ausserdem kann man hier einfaches an/aus wie beim bimetall-schalter einstellen. der i- und d-faktor sind offenbar zeitabhängige regelkreise, aber wie. die mathematikdetails zur pid bringen mich nicht weiter, wo sich anscheinend jeder mathematikberufene zum kreativen entwerfen eines möglichst schlecht unterscheidbaren neuen abstraktionsfaktors (gleich der zusammenfassung eines komplexen zusammenhanges in ein neues wort) verpflichtet fühlt. russische buchstaben kann ich mir auch nicht merken, elegant, tres chic. für eine langsampe rampe setze ich den p-faktor niedrig, i am besten aus oder lang, und d auf möglichst wenig änderungsrate (also kurz ?) um das overshoot zu vermeiden, lange i-zeit ? und kurze d-zeit ? sowie p-faktor niedrig ? eigentlich ist die pid-regelung dafür geschaffen die zeitdauer zwischen steuerzeitpunkt und wirkungssichtbarkeit zu berücksichtigen , zb die hysterese, die verzögerte wärmeleitung. besonders kompliziert bei der einrichtung dieser black box ist ja, daß man keine möglichkeit hat die eingaben isoliert zu kontrollieren. für meine koch/experimentier-platte (aluplatte mit sensor auf herdplatte) habe ich p auf 50, i auf 2000 und d auf 5, aber natürlich mit etwas overshoot, ich habe einfach kapituliert. eine zeitabschaltung habe ich auch noch davor (countdown-timer), diese feature hätte man auch mit einer advanced rex-c kriegen können, aber ob ich mir das nochmal antuen möchte, nee oder. ich stelle zum kochen erstmal auf 300°C , warte bis der druck im schnellkochtopf steigt und setze dann auf 200°C zurück. die aluplatte erreicht die 200°C dann auch, topf zischt, aber im topf ist es so heiß natürlich nicht, sondern ca 120°C. zum plastik-schmelzen brauche ich für polyethylen(ohne hd) ca 180°C. wie gesagt ich habe auch keine ahnung.
Danke für die vielen Tips. Das mit dem Autotun scheint geklappt zu haben. Sollte jetzt alles für gute Backergebnisse ausreichen. PS: Es ist natürlich ein Billiggerät aus China. Funktioniert erst mal und das ist die Hauptsache. Definitiv besser als der alte analoge Regler. Mit dem waren Temperaturschwankungen von 50 grd Standard.
nach der deutschen wikipedia versucht der i-regler die sollwertabweichung mit einer langsam linear ansteigenden wirkung in festzulegender zeit gegenzuregeln. das verhältnis sollwertabweichung zu zeit stellt also die steigung der steuersignalgrößenänderung ein. der sollwertabweichung wird also sich langsam stetig steigernd entgegengewirkt. die gegenwirkung erfolgt also nicht abprupt sondern erreicht den vorgesehenen wert erst nach der festzulegenden zeit, quasi ein eindimmen, langsames hochfahren der steuerkraft. der p-regler reagiert mit einer der größe der sollwertabweichung proportionalen gegensteuerung ohne zeitverzögerung. der d-regler beachtet nur die veränderung in der sollwertabweichung und versucht diese veränderung zu vermeiden. es ist der gegenspieler zum i-regler, dh die zeit wäre ähnlich dem i-regler die steigung der gegensteuerungsignalgrößenänderung. so lese ich das heraus, aber es ist ein wähnen.
ich habe eine berm rex c100fk07 aus china, und habe festgestellt, das verhalten ist nicht immer gleich nachdem man änderungen vorgenommen hat. nach einem neustart ist das verhalten dann anders, aber eben richtig mit den veränderungen. vorbedingung : die sollwerttemperatur ist ca 10°C höcher als der ist-wert. ich stelle fest: der regler vertikal gespiegeltes L, Γ , winkel nach rechts : stellt die zeitbasis ein (1-100 sek) bei 1 läuft der zyklus ein/aus alle sekunde , bei 5 eben 5 sek. ich setze Γ auf 1 sek. dann stelle ich i- und d-regler auf 0 (aus). somit kann ich den P-regler unbeieinflusst einstellen. ich stelle fest bei p-1000 kommt sekündlich ein kleiner spannungspuls der auf meinem drehspul-spannungsmesser bis 40V ausschlägt. ich interpretiere das so, daß das im nulldurchgang einschaltende ssr nach kurzer zeit die phasenamplitude wieder trennt. phasenabschnitt. bei p-500 geht der spannungspuls bis 100V, p-400 150V, bei p-200 dann schon 230V. bei p-50 ist AN 2/3 der sekunde. ich belasse p auf 100 und es scheint 50%/50% an/aus zu sein und die spannung geht bis 230V. stelle ich nun die sollwerttemperatur 50° grad höher als den istwert geht das an/aus-verhältnis auf ca 2/1 , bei 100° höher geht es auf 1/0 (ganz an), bei 80° 8/2 . ich stelle die temperaturdifferenz wieder auf 10°C. nun wähle ich den i-regler von 0 auf 2000. es müßte also erst in 2000 sekunden die temperaturänderung eingetreten sein. jetzt sehe ich die spannung steigt bei nur 10°C temperaturunterschied nur noch auf 1 sekündliche gepulste 150V. soweit meine beobachtung an dem scheißding.
ich habe im wikipedia noch faustregeln zum einstellen von pid-reglern gefunden. es dreht sich wohl alles nur um p-, i- und d-regler. https://de.wikipedia.org/wiki/Faustformelverfahren_(Automatisierungstechnik)
Die wirken hauptsächlich dann wenn das System mal einigermaßen eingeschwungen ist. Die von mir benannte Nachstellzeit berücksichtigt insbesondere das Verhalten wenn der Sollwert bei erstmaligem Aufheizen noch nicht erreicht ist. Da muss man eben berücksichtigen, dass durch die Trägheit des Systemes lange vor erreichen des Sollwertes beginnen muss die weitere Energiezufuhr frühzeitiger zurücknehmen muss als es eigentlich der Fall wäre wie wenn das System mal am Pendeln ist.
Angehängte Dateien:
{kind=link}
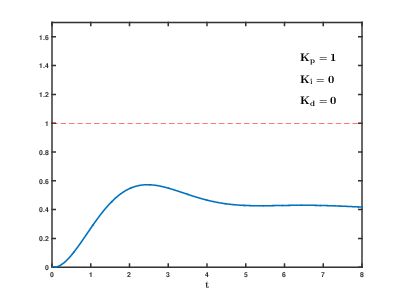
die nachstellzeit ist im i-regler einzustellen. es gibt im engl. wiki den artikel https://en.wikipedia.org/wiki/Proportional%E2%80%93integral%E2%80%93derivative_controller , dort gibt es einen pseudocode, der das verhalten des pid-reglers repräsentieren soll. auch die animierte grafik wie oben. der pseudocode, zitat: Here is a very simple and explicit group of pseudocode that can be easily understood by the layman: Kp - proportional gain Ki - integral gain Kd - derivative gain dt - loop interval time (assumes reasonable scale)[b] previous_error := 0 integral := 0 loop: error := setpoint − measured_value proportional := error; integral := integral + error × dt derivative := (error − previous_error) / dt output := Kp × proportional + Ki × integral + Kd × derivative previous_error := error wait(dt) goto loop zitat ende die regelungsaktionen sind von der sollwertabweichung-fehlergröße (zb temperaturdifferenz) abhängig. ein pid-regler hat also erstmal jeweils einen fixen verstärkungsfaktor (K) für p-, i- und d-regler, der wiederum mit den p-i-d-einstellungen multipliziert wird. der p-regler multipliziert einen einstellbaren proportionalitätsfaktor mit dem sollwertabweichung-fehler und dies wiederum mit dem verstärkungsfaktor K. der i-regler summiert sollwertabweichungfehler pro der einstellbarer zeit auf und multipliziert dies mit K. der d-regler summiert sollwertsabweichungsfehler-änderungswert pro der einstellbaren zeit auf und multipliziert dies mit K. wie armins schon sagte funktioniert es nur wenn es innerhalb des unchaotischen stabilitätsbereich des reglers bleibt. der i-regler (nachstellzeit) verstärkt eigentlich die oszillationen durch die hysterese-trägheit des systems, vermöchte aber auch schnelle oszillationen durch die integration zu dämpfen. der d-regler müßte eigentlich ein negatives vorzeichen, also eine subtraktion seiner regelwirkung der gesamtregelung zufügen, sonst könnte er nicht dämpfend wirken (-K). der pid-regler ist dafür konstruiert eine zb aufheizung sehr schnell und auf den punkt genau, ohne überschießen zu bewerkstelligen. um eine langsame aufheiz-rampe anzufahren, würde ich nun einen kleinen p-regelwert, kaum i-regel und einen höheren d-regelwert wählen. ich hoffe mal, es jetzt endlich verstanden zu haben.
Klappt doch nicht so richtig. Vermutlich ist so ein PID-Regler für eine Backofensteuerung völlig überzogen. Hatte nun mal etwas im Netz gesucht ( leider hatte ich das auf Arbeit gemacht) und gefunden. Nur finde ich es nicht wieder. Dort wurde ein ähnlicher Fall besprochen . Ziel war nach dem erreichen der Temperatur einfach auszuschalten und nach absinken auf ???? wieder einzuschalten.Ohne Einschwingen usw. Der Hinweis war, die I,P und D auf Null zu setzen. Dann noch einen anderen Parameter anpassen. Nur welcher war das. Könnt ihr euch das eventuell zusammenreimen. PS: Wirklich blöd, mit nahezu Null Ahnung an solchen Teilen zu bastel. Sorry.
hallo hilmar. ich habe auch noch weiter getüftelt. wichtig ist nach umkonfiguration neu zu starten(booten).off-on. der faktor i produziert das meiste überschwingen. wenn du den p faktor so einstellst, das der backofen nicht so brutal eingeheizt wird, das er durch die hysterese selbst ins flattern kommt, kannst du an den anderen faktoren drehen. wie lange es braucht, bis der temperatursensor etwas von der heizaktivität bemerkt, also die verzögerung, meint die hysterese. wenn man also starke heizstufe hat, ist der ofen schon am glühen bevor der temperatursensor etwas bemerkt. man muß also die heizleistung mit faktor p verkleinern, sodaß es eigentlich nicht reicht auf die temperatur zu kommen. die anderen regler können dann nachsteuern. wie bereits erwähnt ist deren steuern von der temperaturabweichung abhängig. also p bei mir auf 100. d auf 200 und i als letztes hinzugefügt auf 700. i auf 200 gab überschwingen (zu stark) und i auf 1000 war zu schwach. welche leistung hat dein backofen und was wird normalerweise versucht damit zu heizen und welche menge, gibt es da verzögerte wirkungen, wie wasserdanpf-entwicklung ? wie lange schätzt du, braucht der sensor bis er etwas von der heizaktivität mitkriegt, das einsetzen einer änderung ? wo sitzt der sensor , gibt es einen umluft-ventilator ? p faktor - heizstärke (größer bedeutet kleiner) d-faktor - trägt der verzögerung rechnung (dämpfend) i-faktor - verstärkt das heizen abweichungsbedingt (größer bedeutet kleiner) umgekehrtes L, Γ-faktor (gamma) - an-aus-zeiten-proporz wird auf hier gesetzte intervall-dauer verteilt. (weniger schalttätigkeit), zb 10 - 10 sek . ich hab es auf 3. um einen faktor zu eliminieren, muß man ihn auf 0 setzen. zb p-, i-, d- auf 0 bedeutet ganz normales AN bis temperatur erreicht ist, dann AUS bei übertemperatur. (wird überschwingen) p- proportional-faktor, viel abweichung = viel gegensteuern, auf 3000 wird es sehr langsam anheizen (wenig p-faktor), p- auf 10 - schnell. d- änderungsintergral, fläche unter der änderungskurve ist der regelfaktor, es arbeitet gegen jede änderung. darum dämpfend. i-faktor, intergral-fäche unter abweichungskurve ist der regelfaktor, je mehr abweichung(fläche) desto mehr gegensteuern. entschuldigung, schon wieder so viel geschrieben. der autotune-faktor AΓU ist nur einstellbar, wenn man p auf 0 einstellt
Vielen Dank für die Hinweise.Der Backofen hat 1650 W . Hab es noch mal mit der Autotuning-Funktion probiert. Da fährt er extrem langsam hoch und stellt die Temperatur vernünftig ein. Abweichungen von 5 grd sind unerheblich. Nach dem Autotuning klappt das aber nicht mehr. Weitere Versuche sind wohl unumgänglich. Dazu muss ich aber erst mal deine Hinweise verarbeiten. Mit Steuer-und Regelungstechnik hab ich es nicht so. Komme doch aus einer anderen Strecke. Im Studium waren die Hauptfächer Thermodynamik etc. PS: Das Ausschalten von P funktioniert. EInfach auf Null stellen und I sowie D sind dann auch aus. Der von mir gesuchte Parameter war 7.8 Diffentiallücke (oH). Klappt aber auch nicht. Der Hinweis stammte aus dem Forum Fingers-welt.de
Bin jetzt erst dazu gekommen alles in Ruhe zu lesen. Sehr gut beschrieben. Jetzt hab ich es kapiert ( glaube es zumindest).Sollte also alle klappen. Vielen, vielen Dank für die Arbewit..
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.