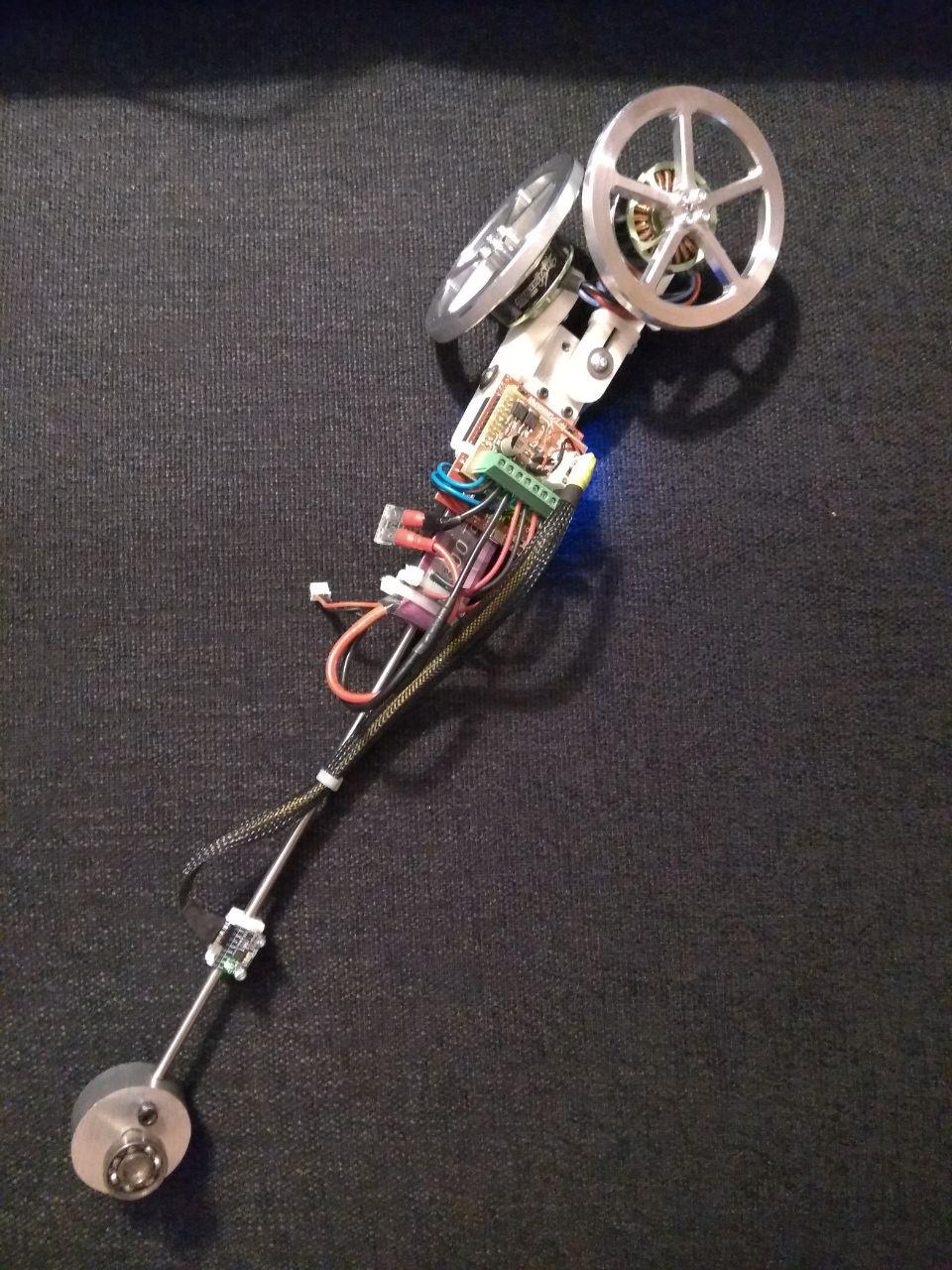
Hallo, vor längerer Zeit habe ich dieses Video im Internet entdeckt. https://www.youtube.com/watch?v=woCdjbsjbPg Dieses hat mich so fasziniert, dass ich mir sofort einen eigenen balancing stick bauen musste. Allerdings mit der ganzen Elektronik auf dem Stab. Durch das erhöhte Gewicht mussten allerdings auch stärkere Motoren verwendet werden und so habe ich BLDC Motoren verbaut. (14 Pol, sensorlos, Aussenläufer). Die erste Achse regelt mittlerweile auch relativ schön, aber soblad die Drehzahl unter einige Prozent der Nenndrehzahl absinkt stottert der Motor, der Stab kippt zur Seite und die ganze Regelung beginnt erneut. Das Problem hierbei ist, dass die Rotorposition nur bei höheren Drehzahlen über das Back EMF gemessen werden kann und im unteren Drehzahlbereich keine Drehzahlregelung möglich ist. Dies war mir von beginn an klar, jedoch erhoffte ich mir bessere Ergebnisse (besser = kleinere Drehzahl). Kennt jemand ein Controllerboard oder auch einen IC welcher auch kleine Drehzahlen (10rpm) bei BLDC Motoren ermöglicht? Es soll ja eine Technologie geben, welche durch kurze Strompulse auch bei stillstehendem Motor die Rotorposition messen kann. Leider kann ich aber keine Controller finden welche dies unterstützen. Oder gibt es eine andere Möglichkeit? Suche speziell eine Lösung für sensorlose Motoren. DC oder sensored BLDC möchte ich nur im Notfall verwenden. Vielen Dank für eure Antworten. Gruss Michael
Angehängte Dateien:
SPI schrieb: > Verpasse dem BLDC ein Getriebe. Benötige leider auch die maximale Drehzahl des Motors zum stabilisieren. Mit einem Getriebe wird das ganze zu langsam. Leider.
Servus, ich wollte so ein Gerät auch mal bauen. Habe noch ein paar alte Festplatten übrig... Welche Funktion hat das Lager unten? Wenn du selber Hand anlegen willst: Zustandstandsregelung mit Beobachter. Der Beobachter schätzt die Position des Rotors bei langsamen Bewegungen. Ich finde das Paper dazu nicht. Kann man auch googlen. Man könnte auch eine Encoderscheibe anbringen. https://www.ebay.de/itm/Photoelectric-Speed-Sensor-HC-020K-Encoder-Coded-Disc-code-wheel-for-Experiment/182978293604?hash=item2a9a5b2f64:m:mnEVawn-QqwZTA6_07fGcAw Ein BLDC Motor ist Synchronmotor. Kommt der Motor aus den Trip, wenn du die Drehzahl vorgibst? Warum willst du regeln? Michael M. schrieb: > Es soll ja eine > Technologie geben, welche durch kurze Strompulse auch bei stillstehendem > Motor die Rotorposition messen kann. Das ist kein Geheimnis. Gibt man auf zwei Leitungen eine Spannung, so richtet sich der Rotor zum gegebenen Magnetfeld aus. Dadurch kann man den Motor zur Encoderscheibe kalibieren.
aSma>> schrieb: > Servus, > ich wollte so ein Gerät auch mal bauen. Habe noch ein paar alte > Festplatten übrig... Die Leistung von Festplattenmotoren ist bei weitem nicht ausreichend für einen Stab dieser Größe. > > Welche Funktion hat das Lager unten? Eine Achse zu isolieren. Es ist (nahezu) unmöglich beide PID Regler zusammen einzustellen. > > Wenn du selber Hand anlegen willst: Zustandstandsregelung mit > Beobachter. Der Beobachter schätzt die Position des Rotors bei langsamen > Bewegungen. Ich finde das Paper dazu nicht. Kann man auch googlen. Das würde ein noch größeres Projekt abgeben.. Da würde ich lieber andere Motoren verbauen. > Man könnte auch eine Encoderscheibe anbringen. > https://www.ebay.de/itm/Photoelectric-Speed-Sensor-HC-020K-Encoder-Coded-Disc-code-wheel-for-Experiment/182978293604?hash=item2a9a5b2f64:m:mnEVawn-QqwZTA6_07fGcAw Es muss der Zeitpunkt für die Kommutierung der nächsten Phase bestimmt werden. Dies mit einem Inkrementalgebr umzusetzen wäre ebenfalls ein sehr großes Projekt. > Ein BLDC Motor ist Synchronmotor. Kommt der Motor aus den Trip, wenn du > die Drehzahl vorgibst? Warum willst du regeln? Die Drehzahl muss geregelt werden um den Stab zu balancieren. > Michael M. schrieb: >> Es soll ja eine >> Technologie geben, welche durch kurze Strompulse auch bei stillstehendem >> Motor die Rotorposition messen kann. > > Das ist kein Geheimnis. Gibt man auf zwei Leitungen eine Spannung, so > richtet sich der Rotor zum gegebenen Magnetfeld aus. Dadurch kann man > den Motor zur Encoderscheibe kalibieren. Ich denke wir reden von unterschiedlichen Methoden. Der Rotor wird durch den Strompuls nicht verdreht. Abhängig von der Rotorposition verändert sich die Induktivität der Wicklung. Damit kann, selbst bei Stillstand, die Position bestimmt werden und ein Langsamlauf wird möglich
Ich könnte dir mit dem ML4428 aushelfen (SMD). Die messen die Lage bereits ab Start. Begünstigend für langsamen Lauf ist die ohnehin vorhandene Schwungmasse. 10RpM sind allerdings verdammt wenig für einen EC-Motor, keine Ahnung, ob das klappt, meiner Meinung nach eher nicht.
Michael M. schrieb: > Oder gibt es eine andere Möglichkeit Externen Incrementalencoder an Motorachse bauen.
Der Dreckige Dan schrieb: > Ich könnte dir mit dem ML4428 aushelfen (SMD). Die messen die Lage > bereits ab Start. > Begünstigend für langsamen Lauf ist die ohnehin vorhandene Schwungmasse. > 10RpM sind allerdings verdammt wenig für einen EC-Motor, keine Ahnung, > ob das klappt, meiner Meinung nach eher nicht. Vielen Dank das geht schon in die richtige Richtung. Hast du den bei dir im Betrieb? Das Sensing ist im Datenblatt leider nur kurz beschrieben. Glaube das hier nur einmalig für den Anlauf die Position bestimmt wird, jedoch nicht bei langsamlauf. Über die normalen Quellen ist der IC auch nicht mehr erhältnlich. Denke es ist schon ein älteres Modell. Gibt es von dem vielleicht einen Nachfolger welcher dauerhaft bei langsamen Drehzahlen misst?
Michael M. schrieb: > Glaube das > hier nur einmalig für den Anlauf die Position bestimmt wird, jedoch > nicht bei langsamlauf. Ja, die Messung für den Start schaltet irgendwann natürlich ab. Wann genau, keine Ahnung, habe schon sehr lange nichts mehr mit den ICs gemacht. Kann also nur aufs Datenblatt verweisen, Basteleien damit sind einfach zu lange her. Die Frage wäre eher, ob er auch wieder in den Startmodus geht, sobald die Drehzahl absinkt. Denn du startest den Motor ja nicht nur, sondern er soll ja danach wieder bis nahe null verlangsamen. Der Startmodus selbst scheint mir ggf. nicht weiter schlimm, Hauptsache, der Motor dreht überhaupt weiter. Also wenn, dann schafft es so ein IC. Die Chancen stehen trotzdem sehr schlecht, ganz eindeutig. EC-Motoren, die bis fast auf null regelbar sind, sind nach wie vor sehr teuer und aufwändig. Für 10RpM brauchst du längst Sinuskommutierung, oder halt einen Istwertgeber für die Drehzahl. Um Letzteren wirst du kaum rumkommen, dann kann der Motor allerdings auch so langsam wie ein Stundenzeiger drehen ;-)
Der Dreckige Dan schrieb: > Michael M. schrieb: >> Glaube das >> hier nur einmalig für den Anlauf die Position bestimmt wird, jedoch >> nicht bei langsamlauf. > > Ja, die Messung für den Start schaltet irgendwann natürlich ab. Wann > genau, keine Ahnung, habe schon sehr lange nichts mehr mit den ICs > gemacht. > Kann also nur aufs Datenblatt verweisen, Basteleien damit sind einfach > zu lange her. > Die Frage wäre eher, ob er auch wieder in den Startmodus geht, sobald > die Drehzahl absinkt. Denn du startest den Motor ja nicht nur, sondern > er soll ja danach wieder bis nahe null verlangsamen. > Der Startmodus selbst scheint mir ggf. nicht weiter schlimm, Hauptsache, > der Motor dreht überhaupt weiter. Aus dem Datenblatt kann ich nur eine einmalige Positionsbestimmung herauslesen. Diese wird dazu verwendet, dass der Motor nicht zuerst in die falsche Richtung anläuft. Wenn er es könnte würde es sicher ganz groß im Datenblatt stehen. ;-) > > Also wenn, dann schafft es so ein IC. Die Chancen stehen trotzdem sehr > schlecht, ganz eindeutig. > > EC-Motoren, die bis fast auf null regelbar sind, sind nach wie vor sehr > teuer und aufwändig. Für 10RpM brauchst du längst Sinuskommutierung, > oder halt einen Istwertgeber für die Drehzahl. Um Letzteren wirst du > kaum rumkommen, dann kann der Motor allerdings auch so langsam wie ein > Stundenzeiger drehen ;-) Teuer und Hobbybastelprojekt sind zwei Wörter welche sich nur sehr bedingt vertragen. Scheint mir fast so als müsste ich Widerwillen einen DC Motor einsetzen. Haben diese eigentlich kein Problem mit dem Langsam lauf an den Stellen wo die Kommutierung wechselt? Was wäre möglich (min. Drehzahl) mit Standard Leistungselektronik (Modellbau) für Automodelle mit/ohne Hall Geber? Die momentan von mir verwendete Leistungselektronik ist für Drohnen konzipiert. Hier lag der Entwicklungsschwerpunkt sicher nicht auf Langsam lauf. Kann mir auch kaum vorstellen, dass Automodelle eine Art Mindestgeschwindigkeit haben.
Mit Hallsensoren sähe es deutlich besser aus. Einziges Problem ist, du hast keine richtige Last an den Motoren, nur eine Schwungmasse. Beides zusammen wäre besser für Gleichlauf bei niedrigen Drehzahlen. Der Leerlaufbetrieb bei sehr niedrigen Drehzahlen ist der am schwierigsten zu regelnde Arbeitspunkt. Ausnahme macht wieder ein richtiger Istwertgeber. Als generelle Verbesserung könntest du mal die Schwungräder ganz weglassen, stattdessen einfach sehr große, flache Außenläufermotoren nutzen. Z.B. in alten Festplatten oder Floppys steckt sowas drin. Der Unterschied ist einerseits die deutlich höhere, kurzzeitige Leistung der Motoren. Bei dieser Anwendung sehr vorteilhaft, du könntest diese "Nadel" ziemlich stark aus der Ruhe bringen, sie würde sich dennoch wieder aufrichten. Zum anderen hast du bei größeren Motoren meist mehr Pole und sie können ganz allgemein auch viel langsamer drehen. Da die ganze Anordnung ja auf Akku läuft und bei weitem keinen Dauerbetrieb leisten muss, könnte man bedenkenlos auch zu DC-Motoren greifen. Ohne Istwertgeber haben sie aber kaum noch Vorteile gegenüber dem EC mit Hallsensoren. Hier müsstest du ebenfalls Aufwand betreiben, die Motoren derart langsam laufen zu lassen. Gegen eine Aufwandsentschädigung suche ich dir entsprechende Motoren raus. Habe vor Jahren mal -zig 5,25" HDDs und Floppys zerlegt. Damals gabs die noch zu einem Euro, heute sind die Preise enorm gestiegen. Problem wäre, die Dinger liegen ganz hinten im Keller, ich hätte wirklich Stunden mit Umräumen und Suchen zu tun. Wäre es mein Projekt, würde ich es aber mit genau solchen Motoren versuchen.
Der Dreckige Dan schrieb: > Mit Hallsensoren sähe es deutlich besser aus. Einziges Problem ist, du > hast keine richtige Last an den Motoren, nur eine Schwungmasse. Beides > zusammen wäre besser für Gleichlauf bei niedrigen Drehzahlen. > Der Leerlaufbetrieb bei sehr niedrigen Drehzahlen ist der am > schwierigsten zu regelnde Arbeitspunkt. Ausnahme macht wieder ein > richtiger Istwertgeber. Habe nach EC Motoren mit Istwertgeber recherchiert, aber nichts in meiner Größe gefunden. Es werden lediglich grössere Servomotoren angeboten. > > Als generelle Verbesserung könntest du mal die Schwungräder ganz > weglassen, stattdessen einfach sehr große, flache Außenläufermotoren > nutzen. Z.B. in alten Festplatten oder Floppys steckt sowas drin. Der > Unterschied ist einerseits die deutlich höhere, kurzzeitige Leistung der > Motoren. Bei dieser Anwendung sehr vorteilhaft, du könntest diese > "Nadel" ziemlich stark aus der Ruhe bringen, sie würde sich dennoch > wieder aufrichten. > Zum anderen hast du bei größeren Motoren meist mehr Pole und sie können > ganz allgemein auch viel langsamer drehen. Das Problem hierbei ist, dass trotz großem Aufwand der Istwinkel nicht exakt bestimmt werden kann. Mit einem Drehgeber in der Achse wäre es einfach, aber da der Stab auf der Spitze balancieren soll kann ich dies nicht verwenden. Sobald der Stab allerdings eine Abweichung von 0.1° zu seinem exakten Schwerpunkt hat, sind Festplattenmotoren zu schwach. Ich benötige eine "große" Schwungmasse um genügend Moment erzeugen zu können. Zudem sind diese auch nicht auf langsamen Betrieb hin optimiert. Können diese überhaupt rückwärts? > Da die ganze Anordnung ja auf Akku läuft und bei weitem keinen > Dauerbetrieb leisten muss, könnte man bedenkenlos auch zu DC-Motoren > greifen. Ohne Istwertgeber haben sie aber kaum noch Vorteile gegenüber > dem EC mit Hallsensoren. Hier müsstest du ebenfalls Aufwand betreiben, > die Motoren derart langsam laufen zu lassen. Der erste Aufbau war auch mit DC Motoren, allerdings sind diese durch den häufigen Richtungswechsel durchgebrannt.. Dies lag sicher auch an dem schlechten Regler, dennoch würde ich Bürstenlose Motoren bevorzugen. > > Gegen eine Aufwandsentschädigung suche ich dir entsprechende Motoren > raus. Habe vor Jahren mal -zig 5,25" HDDs und Floppys zerlegt. Damals > gabs die noch zu einem Euro, heute sind die Preise enorm gestiegen. > Problem wäre, die Dinger liegen ganz hinten im Keller, ich hätte > wirklich Stunden mit Umräumen und Suchen zu tun. Wäre es mein Projekt, > würde ich es aber mit genau solchen Motoren versuchen. Vielen Dank für das Angebot aber habe selber noch einige herumliegen. Glaube jedoch kaum das diese mein Problem lösen können. Von einem Freund wurde mir gerade InstaSpin FOC von TI empfohlen. Er hat bereits Drehzahlen von 60rpm mit einer 30 Poligen Maschine im Leerlauf erzielt. Auf meiner 14 Poligen wären das 2U/s (Ob sich das so einfach umrechnen lässt..). Geht da noch weniger mit Modellbaumotoren und Hall? Gruss Michael
Michael M. schrieb: > Glaube jedoch kaum das diese mein Problem lösen können. Doch, genau diese Motoren hätten das Zeug dazu. Und zwar wegen der vielen Pole, siehe z.B. die aus Floppys. Wie willst du so langsame Umdrehungen mit kleineren Modellbaumotoren hinbekommen? Und dann halt auch, weil das Schwungrad nicht mehr nur Masse ist, sondern gleichzeitig Teil des Motors und der Drehzahlerzeugung. Sowas kann nur dynamischer sein. Wenn du solche Motoren hast, probiere es doch bitte nochmal damit. Selbst Umwickeln auf niedrigere Spannungen ist bei diesen offenen Typen ja kein Problem. Leider sind gerade die Floppymotoren sehr vielpolig, haben aber eher geringe Masse. Und umgekehrt. Dennoch bleibt es ein genereller Vorteil, als Schwungmasse gleich den Motor zu nutzen. Sind deine Motoren denn wirklich aus 5,25" HDDs und Floppys? Motoren aus aktuellen Festplatten sind viel kleiner... Warum willst du eigentlich SO langsam drehen können? Energieeinsparung, so daß die Nadel stundenlang stehen bleiben kann? Michael M. schrieb: > Geht da noch weniger mit Modellbaumotoren und Hall? Auf jeden Fall weniger, als ohne Hallsensoren. Möchte aber sagen, Motoren mit Hallgebern sind im Modellbau seltener, daher könnte es schwierig werden, einen geeigneten Typ zu finden.
Hi, ich denke Du braucht einen Encoder. Bau Dir doch so einen magnetischen Encoder aus vier Hallsensoren auf die Welle des Motors, so einen z.B. (gibt unzählige andere): http://ams.com/eng/Products/Magnetic-Position-Sensors/Angle-Position-On-Axis/AS5040 Ich hab das mal mit so ähnlichen Motoren gemacht und das hat gut funktioniert. Ich vermute bei Dienen Motoren schaut die Welle hinten sind kleines Stück (ca. 1mm) raus, das reicht aus um da einen runden Magneten mit ca. 6mm Durchmesser auf zukleben und dann braucht Du noch noch was um den Sensor halbwegs koaxial mit einem kleinen Abstand zu montieren. Dann brauchst Du nur noch einen Controller die ganzen Modellbau BLDC Controller scheiden aus (Korrektur, es gibt wohl doch welche, siehe [1] z.B.), da hab ich noch nie einen gesehen, der auch noch Hallsensoren auswerten könnte. Ich hab für mein Experiment mit so einem ähnlichen Motor einen 'echten' Servocontroller von Mesa genommen, ich glaub einen 7I39. Viele Grüße Florian [1] https://www.aliexpress.com/item/Maytech-VESC-BLDC-Speed-Controller-and-E-Skateboard-5055-70KV-hall-sensor-motor/32710307169.html?spm=2114.search0104.3.2.7bdd31107nAvXT&ws_ab_test=searchweb0_0,searchweb201602_5_10152_10151_10065_10344_10068_10342_10547_10343_10340_10548_10341_10084_10083_10618_10630_10304_10307_10302_5722316_5711211_10313_10059_10534_100031_10629_10103_10626_10625_10624_10623_10622_10621_10620_10142,searchweb201603_25,ppcSwitch_5&algo_expid=e38897fb-154e-43d8-bf4f-7b6d9433f9a9-0&algo_pvid=e38897fb-154e-43d8-bf4f-7b6d9433f9a9&priceBeautifyAB=0
Der Dreckige Dan schrieb: > Michael M. schrieb: >> Glaube jedoch kaum das diese mein Problem lösen können. > > Doch, genau diese Motoren hätten das Zeug dazu. Und zwar wegen der > vielen Pole, siehe z.B. die aus Floppys. Wie willst du so langsame > Umdrehungen mit kleineren Modellbaumotoren hinbekommen? Und dann halt > auch, weil das Schwungrad nicht mehr nur Masse ist, sondern gleichzeitig > Teil des Motors und der Drehzahlerzeugung. Sowas kann nur dynamischer > sein. Wenn du solche Motoren hast, probiere es doch bitte nochmal damit. > Selbst Umwickeln auf niedrigere Spannungen ist bei diesen offenen Typen > ja kein Problem. > > Leider sind gerade die Floppymotoren sehr vielpolig, haben aber eher > geringe Masse. Und umgekehrt. Dennoch bleibt es ein genereller Vorteil, > als Schwungmasse gleich den Motor zu nutzen. An der Dynamik habe ich absolut keine Zweifel. Meine Zweifel sind die relativ geringe Leistung dieser Motoren. Die Regelung lässt sich nicht beliebig gut optimieren und je mehr Leistung ich habe, desto mehr Spielraum. Mit dem momentanen Setup liegt der maximal Regelbare Auslenkwinkel bei ca. 2°. Mit den Floppy Motoren wird dieser Winkel noch viel kleiner und eine Regelung nahezu unmöglich. Denke in dem Video kann man die benötigten Kräfte erkennen. https://drive.google.com/file/d/1xw_ptAc8uSpl57KZVJ9JgLlCJAy8r--3/view?usp=drivesdk Die Regelung ist sicher noch stark ausbaufähig, allerdings will ich auch eine gewisse Sicherheit in der Dimensionierung haben. Das Ding sollte nicht schon beim kleinsten Luftzug umfallen weil die Leistung nicht mehr ausreicht. > > Sind deine Motoren denn wirklich aus 5,25" HDDs und Floppys? Motoren aus > aktuellen Festplatten sind viel kleiner... Glaube schon, müsste ich mir aber nochmals ansehen. Zumindest einer ist aus einem Laserdrucker und bewegt den Ablenkspiegel. Dieser würde auch schon eine gewisse Masse mit sich bringen. > Warum willst du eigentlich SO langsam drehen können? Energieeinsparung, > so daß die Nadel stundenlang stehen bleiben kann? Wenn die Nadel (Wenn man das 40cm große Ding denn so nennen will) ihren Schwerpunkt exakt über der Spitze hat, so läuft das Schwungrad mit konstanter Drehzahl. Diese ist natürlich beliebig wählbar aber rein optisch ergibt das schon einen großen Unterschied ob das nun 1krpm oder 0 sind. Zudem stören sich die beiden Achsen gegenseitig sehr stark wenn sie nicht sehr langsam drehen (Drehimpulserhaltung). Das macht eine Regelung auf einem Mikrocontroller nahezu unmöglich. Ein Stundenlanger Stillstand wird auf Grund von Sensor-driften nicht möglich sein aber wäre sicherlich nice-to-have. > > Michael M. schrieb: >> Geht da noch weniger mit Modellbaumotoren und Hall? > > Auf jeden Fall weniger, als ohne Hallsensoren. Möchte aber sagen, > Motoren mit Hallgebern sind im Modellbau seltener, daher könnte es > schwierig werden, einen geeigneten Typ zu finden. Es gibt schon einige Modelle. Man muss nur speziell nach Motoren für Automodelle suchen. Nur leider gibt niemand Auskunft darüber wie langsam diese drehen können. Sind jedoch alles Innenläufer und bei meinem begrenzten Platz sehe ich das sehr kritisch. @Florian: >Hi, >ich denke Du braucht einen Encoder. Bau Dir doch so einen magnetischen >Encoder aus vier Hallsensoren auf die Welle des Motors, so einen z.B. >(gibt unzählige andere): Wie funktioniert hierbei allerdings die Abstimmung von dem Motor auf den Encoder? In meinem Fall wären es 14 Pole. Den Platz für einen Servocontroller habe ich leider nicht auf dem Stab. Müsste schon etwas kompaktes sein aber trotzdem vielen Dank.
Michael M. schrieb: > Innenläufer Die haben keineswegs mehr Drehmoment, als die Motoren, die ich meine. Zumal du ja ziemlich kleine Motoren nutzt. Muss mal sehen, ob in irgendeiner Bastelkiste noch wenigstens ein solcher Motor liegt, mache ggf. nachher mal ein Foto... Ein weiterer Vorteil wäre, daß hier Motor und Schwungscheibe mechanisch nicht "in Reihe" liegen, also der entsprechende Antrieb könnte evtl. noch kürzer ausfallen. Möglicherweise, aber selbst das ist unwahrscheinlich, haben die Modellbaumotoren mehr Dauerleistung. Aber die brauchst du nicht, nur kurzzeitige Leistung, oder, genauer, Drehmoment. Festplatten müssen sehr schnell beschleunigen, die Motoren dürften genau das machen. Ich gehe bei EC-Motoren einfach vom Baugröße und Gewicht aus, das bestimmt die Leistung und vor allem das Drehmoment. Der Rest ist meist Marketing.
Der Dreckige Dan schrieb: > Michael M. schrieb: >> Innenläufer > > Die haben keineswegs mehr Drehmoment, als die Motoren, die ich meine. > Zumal du ja ziemlich kleine Motoren nutzt. Deshalb verwende ich derzeit vielpolige Aussenläufer. Ziemlich klein? Durchmesser ca. 50mm und eine Dauerleistung (ja das ist Marketing aber denke man bekommt ein Gefühl für die Größe) von über 100W. > Muss mal sehen, ob in irgendeiner Bastelkiste noch wenigstens ein > solcher Motor liegt, mache ggf. nachher mal ein Foto... > Ein weiterer Vorteil wäre, daß hier Motor und Schwungscheibe mechanisch > nicht "in Reihe" liegen, also der entsprechende Antrieb könnte evtl. > noch kürzer ausfallen. Wäre dir sehr dankbar dafür. > > Möglicherweise, aber selbst das ist unwahrscheinlich, haben die > Modellbaumotoren mehr Dauerleistung. Aber die brauchst du nicht, nur > kurzzeitige Leistung, oder, genauer, Drehmoment. Festplatten müssen sehr > schnell beschleunigen, die Motoren dürften genau das machen. > > Ich gehe bei EC-Motoren einfach vom Baugröße und Gewicht aus, das > bestimmt die Leistung und vor allem das Drehmoment. Der Rest ist meist > Marketing. Kann ich dir nur voll zustimmen. Die verwendeten Motoren werden selbst bei längerem Betrieb kaum handwarm. Können diese Floppy Motoren wirklich Spitzenleistungen von einigen 10W umsetzen? Rein gefühlsmäßig fehlt mir hier einfach die Schwungmasse um genügend Moment erzeugen zu können..
Hi Michael >> Bau Dir doch so einen magnetischen Encoder aus >> vier Hallsensoren auf die Welle des Motors > > Wie funktioniert hierbei allerdings die Abstimmung > von dem Motor auf den Encoder? In meinem Fall > wären es 14 Pole. Man muss einmal (oder bei jedem Start) sozusagen ein Offset zu einer bekannten Rotorstellung ermitteln. Dazu muss man Motor ert mal einfach im Block Commutation Mode betreiben, da bei Dir nur das Schungrad dranhängt reicht sicher auch einfach mal nur eine Spule zu bestromen und dann die Encoderposition auszulesen. Von diesem Startpunkt aus kann man dann in Sinuskommutierung weitermachen. Grüße Florian
Michael M. schrieb: > Können diese Floppy Motoren wirklich > Spitzenleistungen von einigen 10W umsetzen? Es geht zumindest im unteren Drehzahlbereich nicht um die Leistungsfähigkeit. Die Leistungsabgabe jedes Motors ist da ja nahe null. Es geht nur um Drehmoment. Vor allem sorgt Drehmoment dafür, daß kaum erst Drehzahl und damit Leistung benötigt werden, weil der Stab gar nicht erst aus der Balance gerät. Schnelle Regelung vorausgesetzt. Ich vermute aber, daß die Floppymotoren sogar leistungsfähiger sind, als die Modellbaumotoren. Und die von den Festplatten sowieso, nur leider sind die halt nicht so vielpolig. Wenn man den Stab natürlich anstößt, wäre die Frage eher, ob die Floppymotoren überhaupt schnell genug werden können. Welche max. Drehzahlen brauchst du denn da bisher in etwa? Diese Motoren wurden echt für sehr niedrige Drehzahlen gebaut.
> Wenn man den Stab natürlich anstößt, wäre die Frage eher, ob die > Floppymotoren überhaupt schnell genug werden können. Welche max. > Drehzahlen brauchst du denn da bisher in etwa? Diese Motoren wurden echt > für sehr niedrige Drehzahlen gebaut. Das erzielte Drehzahl ist völlig egal. Wichtig ist der dabei erzielte Drehimpuls. Die Drehzahl ist nur eine Folge aus dem Trägheitsmoment der Schwungmasse. Bei großem Schwungrad kann theoretisch auch mit 1rpm stabilisiert werden. Ich habe nur ein relativ kleines Schwungrad verwendet, da meine Leistungselektronik nicht für große Schwungmassen/Ströme ausgelegt ist. Zusätzlich werden die Motoren durch die etwas höhere Drehzahl besser gekühlt
Unterm Strich muss das Drehmoment hoch sein im Vergleich zum Gewicht. Wie fast überall eigentlich ;-) Völlig egal kann die Drehzahl aber nur sein, wenn der Stab nie bewusst ausgelenkt wird.
Der Dreckige Dan schrieb: > Unterm Strich muss das Drehmoment hoch sein im Vergleich zum Gewicht. > Wie fast überall eigentlich ;-) > > Völlig egal kann die Drehzahl aber nur sein, wenn der Stab nie bewusst > ausgelenkt wird. Stimmt ;-) Völlig egal ist es nicht der Drehimpuls von dem Stab durch den Drehimpuls von dem Schwungrad kompensiert werden muss. Größere Schwungmassen wären natürlich schöner, da die Drehzahl geringer wird, jedoch ist der Bauraum durch die zweite Achse sehr begrenzt.
Update: Bin total begeistert von Instaspin FOC. Die gewünschten 10rpm sind zwar nicht möglich aber Drehzahlen bis 30rpm sind nahezu ruckelfrei. Der Ruhestrom (Motor auf konstanter Drehzahl von 1000rpm) konnte von über 1A auf ca. 140mA gesenkt werden. Zudem hat das System jetzt eine viel höhere Dynamik. Am meisten überrascht hat mich die Laufruhe. Selbst bei starken Beschleunigungen hört man die Motoren kaum. Kann dies nur jedem empfehlen der BLDC Motoren ansteuern möchte :-) -LAUNCHXL-F28027F -BOOSTXL-DRV8305EVM
Hi, wir haben uns auch als Demonstrator ein inverses Pendel einfallen lassen :-) Hier unsere Interpretation. https://www.youtube.com/watch?v=17Avj18ML0w
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.