Ich habe stundenlang im web gesucht und bin auch auf den einen oder anderen Beitrag gestoßen, aber leider ohne damit wirklich weiter zu kommen. Meine Aufgabe besteht darin, ohne viel Schnickschnack die Fernübertragung einer Drehbewegung geringer Drehmomentleistung am angetriebenen Teil zu realisieren, als hätte ich vom Drehknopf zur angetriebenen Achse eine biegsame Welle und somit eine direkte Verbindung. *) Schnickschack: Ich denke an reine analoge BMSR-Technik und keine aufwendigen hochwissenschaftlichen Umwege über Arduino oder andere plötzlich auch aufgetauchten und mir fremden Dinge. Also Übertragung vom Drehgeber über die Elektronik zum Servomotor, der sich getreu dem Drehknopf 1:1 mitdreht oder zumindest mit einer gewissen Übersetzung, falls sie sich ergibt. Es gibt Drehgeber verschiedenster Bauart. Es sind zur Auswahl Servomotoren vorhanden, die aus alten MFM-Festplatten stammten und zur Bewegung der Lese-Schreib-Köpfe dienten. Statt biegsame Welle eben Kabelverbindung und zugehöriges Equipment Die Gedankenschritte eines Bastlers könnte man so nachvollziehen: 1.Man kennt ja eine Magnetkupplung, wie man sie in Magnetrührwerken benutzt oder zur magnetischen Übertragung von Achsenstellungen durch nichtmagnetische Stoffe hinduch, wie beim Vaccum-Drehkondensator. 2.Experimente zeigen, wenn man zwei einfache kleine Generatoren mit drehbarem Permanentmagnet direkt 1:1 verbindet und der erste Generator dreht, dann dreht der zweite Generator mit. ABER: Es muss eine gewisse Mindest-Drehwinkelgeschwindigkeit da sein, damit das passiert. Und es muss beim angetriebenen Motor die Drehrichtung gesichert sein, wenn das nicht bereits durch die Konstruktion mit wenigstens 3 Spulenpaketen gesichert ist. 3.Man könnte ja als Drehgeber statt eines baugleichen Motors einen durchsichtigen Inkremetalgeber nehmen und drei Lichtschranken, durch welche auch die Drehrichtung detectiert wird und für jede Spule von der jeweiligen Lichtschranke der Impuls verstärkt und über Schalttransistoren weitergegeben wird. 4.Je nach Drehrichtung werden die Spulen entsprechend gepolt mit Stromimpulsen gespeist, so dass sie mitdrehen lassen. Um aber unabhängig von der Drehgeschwindigkeit ein unabhängiges getreues Mitdrehen zu ermöglichen, müßten die Stromstöße zum sequentiellen Versorgen der Spulen, damit der Schrittmotor als Servomotor auch ausgeglichen dreht, selbst noch einmal gepulst sein. Man müsste die Schritte zwischen den sehr fein gerasterten Magnetpolen mit einer höheren Frequenz überlagern. Genauso, wie man bei Magnetbändern früher die unregelmäßig magnetisierten Partikel mit 75kHz Vormagnetisierung homogenisiert hat, um rauschfreie Aufnahmen zu bekommen, müsste man durch die Überlagerung einer gewissen HF in diesem Bereich, aber deutlich niedriger, da ein gröberes Raster vorliegt, die Bewegung des Schrittmotors vom ruppigen Rechteckimpuls her homogenisieren. 5.Genauso, wie bei einem Drehspulmeßinstrument der Bewegungswinkel des Zeigers von der Spannung abhängt und somit dem Strom in der Drehspule, so müsste man zwischen den jeweiligen Magnetpolen des umlaufenden (Synchron-) Schrittmotors sich von einem Magnetpol zum Anderen ein weich drehendes Feld erzeugen und nur beim Nulldurchgang einer Phase abrupt geschaltet werden. Also Drehstromhüllkurve, und diese bestehend aus feinen Impulsen. Konnte man mir folgen, was ich meine? Wie könnte man das e i n f a c h machen ?
Clemens K. schrieb: > Wie könnte man das e i n f a c h machen ? So wie in der guten, alten Zeit: Mit einem Drehmelder.
Possetitjel schrieb: > So wie in der guten, alten Zeit: Mit einem Drehmelder. Nachtrag: Synchronmotor mit passendem "Umrichter" geht natürlich genauso. Ohne Mikrocontroller wird das aber sehr schwierig.
Clemens K. schrieb: > *) Schnickschack: Ich denke an reine analoge BMSR-Technik und keine > aufwendigen hochwissenschaftlichen Umwege über Arduino oder andere > plötzlich auch aufgetauchten und mir fremden Dinge. Genau das falsche Unterforum "µC & Elektronik (Mikrocontroller und Digitale Elektronik)" getroffen. Zählt das auch zu den fremden Dingen?
Clemens K. schrieb: > Statt biegsame Welle eben Kabelverbindung und zugehöriges Equipment Das ist das Gegenteil von einfach. hjkfvsdlgfb
Das muss man sich auf der Zunge zergehen lassen: Clemens K. schrieb: > keine > aufwendigen hochwissenschaftlichen Umwege über Arduino ... und dann folgt eine Abhandlung über diverse technische Details die vermeintlich gaaaaanz ohne "Schnickschack" auskommen. Das wird noch lustig hier ....
Clemens K. schrieb: > Wie könnte man das e i n f a c h machen ? Was verstehst du unter "e i n f a c h"? Technisch möglichst einfach aufgebaut, oder für dich möglichst einfach umzusetzen? Oder anders: Sind auch komplexere Dinge erlaubt, solange man sie fix und fertig kaufen kann? Günter Lenz schrieb: > Dies geht gut zum Beispiel mit einem Modellbauservo. Ja. Auf die andere Seite ein "Servotester", der ein von einer Poti-Position abhängiges Signal an den Servo schickt.
Clemens K. schrieb: > Statt biegsame Welle eben Kabelverbindung und zugehöriges Equipment Übliche Funkfernsteuerung. Notfalls den Funk weglassen oder über Kabel senden. Georg
"Drehmelder ist mir zu allgemein und somit als Antwort unbrauchbar. Die Bauform, wie man es realisiert ist mir wichtig!
Mir ist wichtig, eine Antwort zu finden! Wer digitzalisiert, kennt hoffentlich auch die zugrundeliegende Analogie. Er muss ja wissen, was er digitaliosiert. Also was ist hier falsch imm Forum? Ist die Form wichtiger, als das Thema? Die Rubrik wichtiger als der Sinn? Ein bißchen hohl finde ich! Rhetorik vor Wissen! Nicht mein Ding!
Was für ein "Umrichter" ? Ich kenne Frequenzumrichter zur Regelung der Drehzahl von Drehstrommotoren, aus 50Hz höhere Frequenzen und damit ein schnelleers Drehfeld zu machen. Das ist es aber nicht, worum es geht.
fix und fertig kaufen - wäre nicht schlecht, wenn man wüßte, worunter zu finden und zu welchem Preis?
Clemens K. schrieb: > Was für ein "Umrichter" ? > Ich kenne Frequenzumrichter zur Regelung der Drehzahl von > Drehstrommotoren, aus 50Hz höhere Frequenzen und damit ein schnelleers > Drehfeld zu machen. > > Das ist es aber nicht, worum es geht. Theoretisch kann ein Umrichter auch Drehfelder mit Frequenz 0 erzeugen und auch das Drehfeld "andersherum" drehen lassen. Wie du den Umrichter dann ansteuerst und ob es so etwas fertig gibt, kann ich dir allerdings nicht sagen...
Der Denkansatz mit dem Kompensationsschreiber ist im Grunde genommen der Genialste! Es ist ja ein geschlossener Regelkreis durch die Widerstandsbahn als Rückmelder! Kann man beim Antriebsmotor ja auch mit einem Zylinder machen, der einen Graukeil hat und das auf einen Fotowiderstand fallende Licht, das in Abhängighkeit vom Drehwinkel vermindert wird, auswertetet, so dass mechanischer Vderschleiß ausgeschlossen ist. Wirkt auch wie ein Poti und auch noch so gut wie rauschfrei und knisterfrei. Ein Gleichstrommotor hat jedoch eine gewisse Hysterese und eigent sich dennoch nicht für genauere Einstellung. Der Schrittmotor könnte mit seiner extrem feinen Rasterung (die dennoch eine gewisse Zwangsdigitalisierung mit sich bringt) aber hysteresearm und genau arbeiten. Nehmen wir als Grundmodell das Funktionsprinzip eines Drehspulinstrumentes und betrachten den Step Motor als eine ringförmige Aneinanderreihung von so vielen Messwerken, wo bei Erreichen des Endes eines Messwerkwinkels auf das Nächste umgesprungen wird und das davorliegende zurückgesetzt wird. Im Prinzip wie eine Richtungskupplung, ein Freilauf, die in eine Richtung drehen kann und in Gegenrichtung zurückrutschen läßt und auf der Achse würden mehrere Messwerke sitzen und statt des Zeigers nur die Welle Derselben. Spule 1 0 .... 100% - Sprung - Spule 2 0 .... 100% - Spule 3 0 ... 100% usf. Und das alles unter Regelkreis, bis eben Einstellwinkel des Gebers mit dem Einstellwinkel des Step-Motors übereinstimmt.
Das ist einm interessanter Aspekt! Umrichter bei Frequenz Null! Aber das ist ja vermutlich Dasselbe, was ich auch meine: Wenn man früher an eine alten MFM-Festplatte im Betrieb an dem Kopfmotor versuchte zu verdrehen, da ging das nicht. Die Achse wurde festgehalten. Und wenn gelesen oder geschrieben wurde, ging er je nach Spurbreite einige Rasten weiter und blieb da stehen.
Günter Lenz schrieb: > Dies geht gut zum Beispiel mit einem Modellbauservo. > > https://de.wikipedia.org/wiki/Servo Ja stimmt genau! Das kenne ich auch! Aber da kann ich die vorhandenen Motoren nicht dafür nehmen, sondern muss einen kompletten Bausatz kaufen und die kosten richtig Geld! Und präzise sind die nicht. Ein Forenmitglied schrieb einmal zum Thema, er möchte einen Drehkondensator fernbedienen. Und um das Thema geht es hier auch, weil bei hohen Leistungen keine Kapazitätsdioden zum Einsazu kommen und Varicaps sind stets ein Kompromiss, denn es sich nichtlineare Bauelemente und verursachen teilweise Kreuzmodulation.
> Also was ist hier falsch imm Forum? Entschuldige mal, Dir wurden zwei Lösungsansätze genannt: - Modellbau Servo mit Fernbedienung oder Servotester - Drehgeber Sollen wir Dir jetzt erklären, wie ein Drehmelder funktioniert und wie er genau aussieht? Informiere Dich doch selbst, dann wirst du sehen, dass es diese Dinger in zahlreichen sehr unterschiedlichen Varianten gibt. Diese mit einem Arduino anzufragen ist kinderleicht. Ebenso ist das Ansteuern von Schrittmotoren mit Arduino kinderleicht. Wenn Dir das zu kompliziert ist, dann bleibe bei der mechanischen Welle. > Der Denkansatz mit dem Kompensationsschreiber ist im Grunde > genommen der Genialste! Toll,was und so schnell! Aber erstmal meckern, das ist Hohl.
Beo Bachter schrieb: > Das muss man sich auf der Zunge zergehen lassen: > > Clemens K. schrieb: >> keine >> aufwendigen hochwissenschaftlichen Umwege über Arduino > > ... und dann folgt eine Abhandlung über diverse technische > Details die vermeintlich gaaaaanz ohne "Schnickschack" auskommen. > > Das wird noch lustig hier .... Also der Hinweis auf den Artikel war doch nicht falsch und da steht alles drin: "Analog- und Digitalservos Die Elektronik von Modellbauservos kann digital oder analog aufgebaut sein. Demnach werden Servos als Digital- oder Analogservos klassifiziert. Digitalservos haben eine höhere Winkelauflösung und die Servoposition wird schneller und präziser geregelt. Digitalservos lassen sich häufig auch umprogrammieren, wodurch sich (je nach Servomodell) die Geschwindigkeit, der Überlastschutz und ähnliches an die Anwendung anpassen lassen.[1] Allerdings ist der Bedarf an Hilfsenergie und auch der Preis von Digitalservos höher als der von Analogservos."
> Aber da kann ich die vorhandenen Motoren nicht dafür nehmen, sondern > muss einen kompletten Bausatz kaufen und die kosten richtig Geld! Modellbau Servos kauft man am Stück, nicht als Bausatz. Kosten bei Conrad ab 5 Euro, bei AliExpress bekommst du dafür 5 Stück. > Und präzise sind die nicht. Stimmt. Du hast aber auch nicht geschrieben, wie deine Anforderungen lauten. Also tue uns allen den Gefallen, und nenne die Anforderungen, damit wir nicht weiter unsere Zeit mir Dir vergeuden.
> Also der Hinweis auf den Artikel (über Servos) war doch nicht falsch
Jetzt hast du mich abgehängt. Was willst du denn?
Überlegung: Der Step-Motor ist ein Gleichstrommotor ohne Kommutator. Der Kommutator wird nicht automatisch durch die eigene Drehbewegung angetrieben, sondern durch eine Steuerung zwangsgeführt. Würde man auf die Achse also statt des elektromechanischen Kommutators einen mit Lichschranke und Inkreemtalscheiben bauen, wäre das die kontaktlose Alternative und der Motor liefe wie ein normaler Gleichstrommotor. Geht man davon ab, dass es ein drehender Motor ist, sondern betrachtet ihn als Linearmotor, dann kommt man der Sache gedanklich schon näher. Man könnte ja auch eine Magnetstange mit Rastermagneten haben, wie eine Zahnstange, die abwechselnd N S N S N S Polung hat und der Stator eine Anordnung von Spulen ist, die nacheinander Strom erhalten und die Magnetstange schieben. So müsste man die Weitergabe der Impulse wie beim Lauflicht sehen und im einfachsten Falle mit einem Ringzähler arbeiten für eine Richtung. Statt selbst weiterschaltendem Ringzähler für automatischen Motorlauf könnte man von einem Geber aus mit drei Steuerleitungen auskommen und die analoge Übergabe der Leistung von einer Spule zur Anderen - aber eben zugleich für alle drei wirkend damit steuern. Man dreht den Geber, die Spulen werden nacheinander mit ansteigendem Strom versorgt, so dass der Anker mitläuft und ab einem Maximalwert der einen Spule wird sofort ansteigend von der nächsten Spule übernommen, während die vorherige Spule umgepolt wird und die umgeplte Spannung im gleichen Maße steigt, wie bein der nächsten Spule, so dass Abstoßung von des vorherigen Magnetfeldes sich mit der Anziehung des nächsten Magnetfeldes stetig kombiniert. Jetzt kommt es darauf an, wie man das realisiert.
> Jetzt kommt es darauf an, wie man das realisiert.
Mit ganz vielen Bauteilen - oder einem Mikrocontroller und einem
Motor-Treiber aus Massenproduktion.
Ja, es ist in der Tat eine Fleißaufgabe. Viele Bauteile sind tatsächlich massig da, die aus niedergegangener Industrie stammen und im Neuzustand in den Schrottcontainer geworfen wurden. Finanziell klemmt es auch überall, aber das soll mich nicht davon abhalten, bestimmte Ziele zu erreichen, solange Material da ist, das ich nicht neu kaufen muss. Es geht eben um eine Schaltungslösung, die möglicherweise schon erprobt ist. Servomotoren kannte ich schon 1980 und da gab es keine Arduinos. Da hatten wir Schaltungen mit Z80 (UA880), 8086, 80186, 80286 ... und für den Privatmann unerschwinglich. Und Nichts ist zu alt. Auch heute noch gibt es so viele IC und andere Bauelemente, die bereits 1972 auf dem Markt waren. Eien Lösung - und sei sie noch so alt - kann es doch geben und funktionieren. Natürlich, wenn Zeit eine Rolle spielt, muss man einen Kompromiß finden. Momentan haben die Chinesen nichts in eBay, was in Frage käme. Auf dem deutschen Markt kann man ja nichts mehr kaufen, weil das mehrfache vom Preis und eben auch aus China. :-)
> Es geht eben um eine Schaltungslösung, die möglicherweise > schon erprobt ist. Ich vervollständige den Satz: und mit den vorhandenen Bauteilen auskommt, die du uns aber nicht verraten hast. Oder möchtest du einen Schaltungsentwurf und Programm mit 80286?
Clemens K. schrieb: > "Analog- und Digitalservos > Die Elektronik von Modellbauservos kann digital oder analog aufgebaut > sein. Demnach werden Servos als Digital- oder Analogservos > klassifiziert. Digitalservos haben eine höhere Winkelauflösung Analogservos haben gar keine Winkelauflösung, denn schließlich sind sie ja analog. > und die Servoposition wird schneller und präziser geregelt. Ja. > Digitalservos lassen sich häufig auch umprogrammieren, wodurch sich (je > nach Servomodell) die Geschwindigkeit, der Überlastschutz und ähnliches an > die Anwendung anpassen lassen.[1] Allerdings ist der Bedarf an > Hilfsenergie und auch der Preis von Digitalservos höher als der von > Analogservos." Was ist denn mit "Hilfsenergie" gemeint? Die Stromversorgung? Preislich sind die inzwischen nicht mehr so großartig höher.
> Was ist denn mit "Hilfsenergie" gemeint?
Das sind die Brötchen die du essen musst, um genug Geld zu
erwirtschaften, damit du sie dir leisten kannst :-)
Clemens K. schrieb: > Es geht eben um eine Schaltungslösung, die möglicherweise schon erprobt > ist. Die sog. elektrische Welle (siehe auch Link weiter oben) ist eine rein elektromechanische Lösung, die m.W. z.B. auf Schiffen lange für den sog. Maschinentelegraphen genutzt wurde. Ich vermute, das diese Geräte aus Kostengründen heutzutage obsolet sind. Eine billige Alternative wäre heutzutage die Kombination aus (Fertig-) Modellbauservo und Servotester. Diese Lösung funktioniert aller- dings nur in einer Richtung und nicht in beiden wie die elektrische Welle. Grundsätzlich gibt es massenhaft Lösungen zur Positionierung mit irgendwelchen (Servo-)Motoren und Weggebern. Das funtioniert dann auch mit Geräten, die hunderte von Tonnen wiegen, wie z.B. Spiegelteleskope. Im Endeffekt kommt es da ganz auf die persönlichen Anforderungen an. > Und Nichts ist zu alt. Auch heute noch gibt es so viele IC und andere > Bauelemente, die bereits 1972 auf dem Markt waren. Ja, z.B. Komparator-ICs. Mit diesem, zwei Potis und einer H-Brücke samt Motor kann man sich sein eigenes Gerät bauen. Das wird dann aber sicherlich teurer als die Modellbauservo&Servotester-Lösung.
Clemens K. schrieb: > "Drehmelder ist mir zu allgemein und somit als Antwort unbrauchbar. > Die Bauform, wie man es realisiert ist mir wichtig! So heißt das Teil aber nun mal. Im angelsächsischen Raum oder beim Militär auch Sychro genannt. Du brauchst ein Drehmeldegeber und einen Drehmeldeempfänger (sind beide identische Geräte). Aus Wikipedia: "Die Drehbewegung am Drehmeldeempfänger ist zu der Verdrehung am Drehmeldegeber synchron, so als wären die Achsen beider Drehmelder mechanisch (zum Beispiel mit einer biegsamen Welle) miteinander verbunden." Das ist doch genau das, was Du möchtest.
Mit einem 5 €-Servo und einem 5 €-Servotesterbausatz geht das ohne Probleme und erfüllt alle genannten Forderungen. Halt! Die zwei 3 €-Steckernetzteile habe ich noch vergessen! Und die 2 Leitungen zwischen Servo und Servotester auch noch! Nein, geht also doch nicht. Der finanzielle und technische Aufwand ist einfach zu gigantisch (*). Blackbird (*) Eher wohl der "Aufwand", das hier zu verstehen.
Clemens schrieb: >Es sind zur Auswahl >Servomotoren vorhanden, die aus alten MFM-Festplatten stammten und zur >Bewegung der Lese-Schreib-Köpfe dienten. Dann verbinde 2 dieser Servomotoren 1:1 elektrisch miteinander. Fertig bist Du. Das ist nichts Anderes, als ein Synchro, wie er z.B. bei Radaranlagen genutzt wird. MfG Paul
Angehängte Dateien:
-

DSCF4568-Servoschaltung.JPG
72 KB -

DSCF4570-Servoplatine.JPG
62 KB
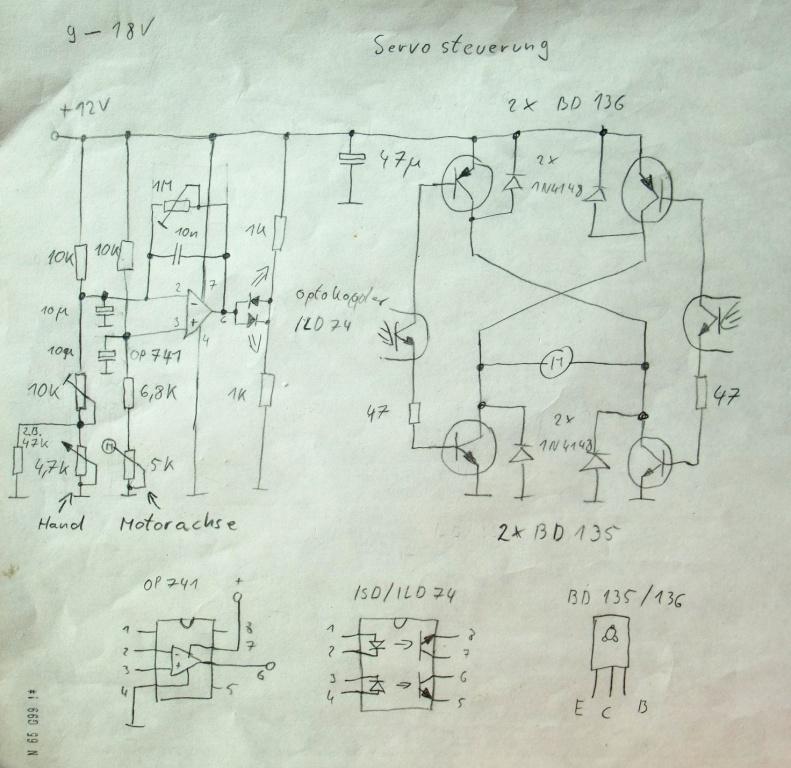
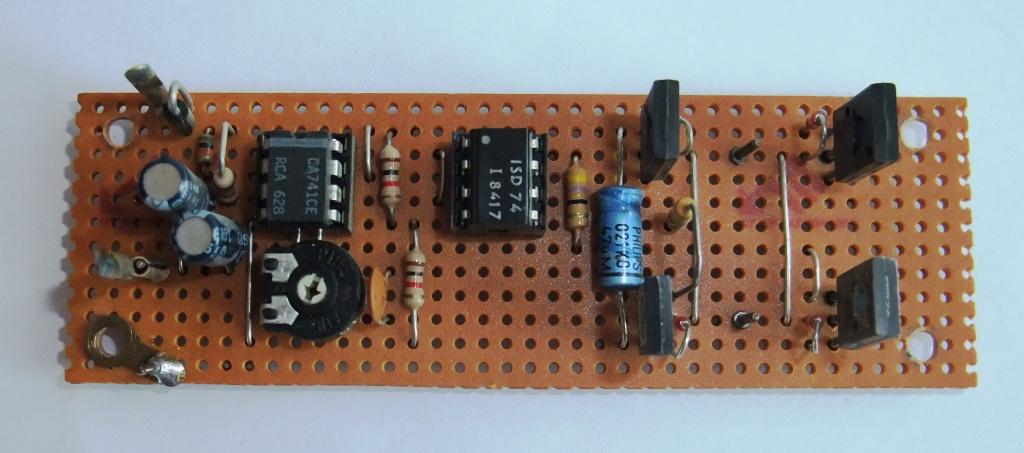
Mit dieser Schaltung habe ich damals immerhin einen großen Röhrenfernseher, der auf einem formschönen Axial-Rillenkugellager stand mit einem Modellbaumotor (mit Getriebe) drehen können. Durch den Optokoppler kann die H-Brücke an einer anderen Versorgungsspannung betrieben werden und sie wird dadurch auch noch selbstsicher, weil niemals beide LED's gleichzeitig leuchten können. Mit dem Hand-Poti stelle ich die gewünschte Position ein und der Motor dreht sich solange bis die Position erreicht ist (das zweite Poti muss mit der Kugellagerachse verbunden werden). Mit einem Spindelpoti lassen sich auch mehrere Umdrehungen realisieren.
Clemens K. schrieb: > Mir ist wichtig, eine Antwort zu finden! > Wer digitzalisiert, kennt hoffentlich auch die zugrundeliegende > Analogie. > Er muss ja wissen, was er digitaliosiert. Philosophie for runaways? Clemens K. schrieb: > Ein bißchen hohl finde ich! Rhetorik vor Wissen! Nicht mein Ding! Als jemand der etwas vom Forum will, sollte Höflichkeit dein Ding sein. Clemens K. schrieb: > Ja, es ist in der Tat eine Fleißaufgabe. Deine ellenlangen Monologe zu lesen. Das stimmt. Wenn du mal elementare Dinge klären könntest wie: Darf das System Schlupf haben Welche Mindest und MaximalDrehzahl Welche Momente hast zu zur Verfügung und brauchst du? Dann könnte man vieleicht eine konkretere Lösung finden. z.B Die von Paul Baumann genannte: Paul B. schrieb: > Dann verbinde 2 dieser Servomotoren 1:1 elektrisch miteinander. Fertig > bist Du. Das ist nichts Anderes, als ein Synchro, wie er z.B. bei > Radaranlagen genutzt wird. Man könnte natürlich auch eine Elektronik die Schritte des ersten Steppers zählen lassen und dann damit den 2. Stepper ansteuern. Oder man nimmt einen guten DC Motor als Generator und steuert mit der drehzahlproportionalen Ausgangsspannung einen (PWM) Motorcontroller an der den 2. Motor bestromt.
Antennendrehanlage fällt mir noch ein. Hat fast jeder Funkamateur. Blackbird
Blackbird schrieb: > Antennendrehanlage fällt mir noch ein. Hat fast jeder Funkamateur. Die verwenden wohl auch die typische, oben erwähnte Schaltung mit zwei Potis plus Komparator.
Beitrag #5328522 wurde von einem Moderator gelöscht.
Beitrag #5328539 wurde von einem Moderator gelöscht.
Clemens K. schrieb: > Wie könnte man das e i n f a c h machen ? Ein Schrittmotor als Drehgeber, und ein zweiter Schrittmotor als Aktor direkt verbunden, und fertig ist die Laube, wenn die Kraft nicht über der Haltekraft des Steppers liegt.
1 | A------A |
2 | _ _ |
3 | A------A |
4 | Stepper Stepper |
5 | B------B |
6 | _ _ |
7 | B------B |
Will man mehr Kraft, muss man den Aktor-Schrittmotor bestromen und schliesst ihn an einerm Schrittmotortreiber an, der seine Signale aus dem Incrementalencoder bekommt. Hat der Incrementalenoder ENTPRELLTE Ausgänge, kann man einfach einen Kanal an STEP und den anderen an DIR anschliessen, oder man entprellt zumindest des STEP Kanal
1 | B --|S>o--R--+--|S>o-- |
2 | | |
3 | C |
4 | | |
5 | GND |
Will man gar nicht mehrmals rumdrehen können, sondern nur einen Knopf der per Potistellung die Position vorgibt und einen Motor der dorthin positioniert, ebenfalls an einem Poti drehend, tun es Servo-ICs wie TDA3629 geht bis 0.8A, TLE4206 und MC33030 bis 1A, DRV590/591/593/594 regeln Motoren bis 3A durch PWM.
Beitrag #5328586 wurde von einem Moderator gelöscht.
Beitrag #5328782 wurde von einem Moderator gelöscht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.