Hallo, in Datenblättern verschiedenster Schrittmotoren ist immer wieder der Phasenstrom in A zu entnehmen. Ein Treiberbaustein sorgt dafür, dass ein sinusförmiger Phasenstrom durch die Spulen geschickt wird. Leider habe ich nirgends eine Antwort darauf gefunden, aber mich würde sehr interessieren, ob es sich bei dieser Phasenstromangabe in den Datenblättern der Schrittmotoren um den Effektivwert oder den Spitzenwert (=Amplitude) des sinusförmigen Stromes handelt? Kann das jemand beantworten? Danke
Die Schrittmotoren haben stets den Effektivwert genannt, der aber bei simplen Schrittmotortreibern, die keine Microschritte mit Stromregelung machen können sondern nur Vollschritte, auch dem Spitzenstrom entspricht. Ein Mikroschritt-Treiber der Sinus liefert muss aber einen 1.4 mal grösseren Spitzenstrom liefern können um dem Motor das volle Drehmoment laut Datenblatt (bei der erlaubten Temperaturerhöhung laut Datenblatt, meist +70 GradC) herauszulocken. Im Moment wo beide Spule bestromt werden, fliesst dass 2 x 0.7 x 1.4 = 2 also doch nur der Nennstrom laut Datenblatt. Die meisten wissen das nicht, betreiben den Motor mit dem 0.7-fachen Strom, bekommen auch nur das 0.7-fache Drehmoment und verbraten nur die halbe Leistung und freuen sich, daß der Motor kühl bleibt und lange lebt, haben aber im Endeffekt zu viel für den überdimensionierten aber nicht voll ausgenutzten Motor bezahlt.
Zunächst mal danke für die Antwort. Michael B. schrieb: > der aber bei simplen Schrittmotortreibern, die keine Microschritte mit > Stromregelung machen können sondern nur Vollschritte, auch dem > Spitzenstrom entspricht. Und wie ist das bei Schrittmotortreibern, die Mikroschritte mit Stromregelung machen können? Beispiel: 32 Mikroschritte pro Vollschritt, 200 Vollschritte pro Umdrehung?
Wenn ich die erste Aussage richtig verstehe, dann ist der Phasenstrom durch eine Phase im Mikroschrittbetrieb dementsprechend kleiner?
Chris13 schrieb: > Ein Treiberbaustein sorgt dafür, dass ein sinusförmiger Phasenstrom > durch die Spulen geschickt wird. Das ist nur in Ausnahmefällen so. Woher hast du diese Information?
Chris13 schrieb: > Wenn ich die erste Aussage richtig verstehe, dann ist der Phasenstrom > durch eine Phase im Mikroschrittbetrieb dementsprechend kleiner? Kleiner als was? Der Strom durch den Motor ist durch die Betriebstemperatur begrenzt, d.h. es kommt ausschließlich auf den Effektivwert der Summe aller Ströme an.
Wolfgang schrieb: > Das ist nur in Ausnahmefällen so. > > Woher hast du diese Information? Meines Wissens wird, je mehr Mikroschrotte verwendet werden, der Strom immer mehr "sinusförmig", ist das nicht so? Wolfgang schrieb: > Kleiner als was? > Der Strom durch den Motor ist durch die Betriebstemperatur begrenzt, > d.h. es kommt ausschließlich auf den Effektivwert der Summe aller Ströme > an. Ich betreibe einen bipolaren Schrittmotor (Anschlüsse A+, A-, B+, B-) mit Angabe 2,3A / Phase. Dabei messe ich den Strom durch einen dieser Anschlüsse (z.B. A+) mit einerr Stromzange und einem Oszilloskop. Es sind hier auch schöne, sinusförmige Ströme zu erkennen. Die Frage die sich mir stellt ist, wie hoch die Amplitude dieser gemessenen sinusförmigen Ströme sein muss, wenn die Angabe im Schrittmotordatenblatt 2,3A/Phase ist?
Chris13 schrieb: > Die Frage die sich mir stellt ist, wie hoch die Amplitude dieser > gemessenen sinusförmigen Ströme sein muss, wenn die Angabe im > Schrittmotordatenblatt 2,3A/Phase ist? 2,3A bei vollem Schritt. Bei Mikroschritt 2,3 x 1,4 ~ 3.2A wenn Drehmoment voll genutzt wird. Meisten Treiber hat Stromsenkung Funktion bei Stillstand, damit der Motor nicht zu warm wird.
Tany schrieb: > Meisten Treiber hat Stromsenkung Funktion bei Stillstand, damit der > Motor nicht zu warm wird. So, so ... Genausowenig, wie "die meisten" Schrittmotortreiber sinusförmigen Strom liefern, wird bei "den meisten" Treibern im Stillstand der Strom abgesenkt. Schon Mikroschrittsteuerung mit 128 Schritten ist eher selten. Nenne Typenbezeichnungen - diese Allgemeinplätze bringen niemanden weiter.
Die Strom Senkung kann man per Hard- oder Software realisieren, wer das nicht kann, sollte lieber fertiges kaufen. > Nenne Typenbezeichnungen - diese Allgemeinplätze bringen niemanden > weiter Die meist verbreitete Endstufe mit TB66XX kann das. Selbst bei der Endstufe mit uralten L293 /L298 ist es kein Problem. Wolfgang schrieb: > Schon Mikroschrittsteuerung mit 128 Schritten ist eher selten Warum 128? Ab 8 Mikroschritten sieht der Phasenstrom fast "sinus" aus.
Tany schrieb: > Warum 128? Ab 8 Mikroschritten sieht der Phasenstrom fast "sinus" aus. Das frage mal die Hersteller, z.B. STMicroelectronics mit dem L6470? Tany schrieb: > Die meist verbreitete Endstufe mit TB66XX kann das. Der TB6600 macht von sich aus gar nichts. Für die Stand-By Stromabsenkung muss ein externer Controller die Mode Steuereingänge entsprechen umkonfigurieren. Genauso gut könnte man sagen, ein A4988 kann das. Der Controll muss nur die Referenzspannung passend absenken. Nur weil im Datenblatt das Wort "Stand by" auftaucht, muss das noch lange nicht heißen, dass der Schrittmotorcontroller irgendwie automatisch im Stillstand den Strom absenkt. Man achte auf das Kleingedruckte...
Wolfgang schrieb: > Der TB6600 macht von sich aus gar nichts > ...L6470? der allein auch nicht! lesen und verstehen muß man können. Tany schrieb: > Die Strom Senkung kann man per Hard- oder Software realisieren > Die meist verbreitete Endstufe mit TB66XX Wolfgang schrieb: > dass der Schrittmotorcontroller irgendwie... Es geht hier um Motortreiber oder Endstufe und nicht um Schrittmotorcontroller. Es ist mir egal, wie du mit deinem Halbwissen rum kommentiert. Michael hat oben genau erklärt und somit ist die Frage von TO fachlich beantwortet.
Wolfgang schrieb: > Das frage mal die Hersteller, z.B. STMicroelectronics mit dem L6470? Genau getroffen, genau den L6470H von ST Microelectronics verwende ich. Tany schrieb: > Michael > hat oben genau erklärt und somit ist die Frage von TO fachlich > beantwortet. Ganz habe ich das trotzdem noch nicht verstanden: welcher Strom (Amplitude oder Effektiv) fließt nun im Voollschrittbetrieb und im Mikroschrittbetrieb? Und hat die Anzahl der Mirkoschritte EInfluss auf den Stromwert? Danke nochmals!
Chris13 schrieb: > Michael B. schrieb: >> der aber bei simplen Schrittmotortreibern, die keine Microschritte mit >> Stromregelung machen können sondern nur Vollschritte, auch dem >> Spitzenstrom entspricht. > > Und wie ist das bei Schrittmotortreibern, die Mikroschritte mit > Stromregelung machen können? Einfach weiterlesen, stand doch im weiterführenden Text. Chris13 schrieb: > Ganz habe ich das trotzdem noch nicht verstanden: > welcher Strom (Amplitude oder Effektiv) fließt nun im Voollschrittbetrieb Maximal Nennstrom (der beim Motor angegebene Effektivstrom). > und im Mikroschrittbetrieb? Maximal Nennstrom * 1.414 = Spitzenstrom von Sinus. > Und hat die Anzahl der Mirkoschritte Einfluss auf den Stromwert? Nein. Schon mehr als Halbschritte reichen, 2 Mikroschritte hätten 70% und 100% da dürfte man den 100% Strom auf den 1.4-fachen im Datenblatt genannten effektiven Motorstrom einstellen. Tany rechnet dir schon vor, daß du einen 3.2A Motortreiber brauchst: Tany schrieb: > Bei Mikroschritt 2,3 x 1,4 ~ 3.2A wenn Drehmoment voll genutzt wird. wenn du das im Datenblatt angegebene Drehmoment voll erreichen willst.
Michael B. schrieb: > Im Moment wo beide Spule bestromt > werden, fliesst dass 2 x 0.7 x 1.4 = 2 also doch nur der Nennstrom laut > Datenblatt. was bedeutet hier der Wert 0,7?
Tany schrieb: > 2,3A bei vollem Schritt. Bei Mikroschritt 2,3 x 1,4 ~ 3.2A wenn > Drehmoment voll genutzt wird. Die Angabe ist hier 2,3A / Phase. Nachdem ich hier einen 2-phasen Scrhittmotor habe, und den Strom in EINER Phase mir Stromzange messe, muss die Amplitude, die ich hier messe, dann 3,2A/2 = 1,6 A sein?
Chris13 schrieb: > was bedeutet hier der Wert 0,7? Sinus(45 Grad), denn wenn beide Spulen betromt sind, entspricht das der Überlappung der Sinuskurven in genau diesem Punkt.
Chris13 schrieb: > Die Angabe ist hier 2,3A / Phase. Nachdem ich hier einen 2-phasen > Scrhittmotor habe, und den Strom in EINER Phase mir Stromzange messe, > muss die Amplitude, die ich hier messe, dann 3,2A/2 = 1,6 A sein? Erstmal musst du klären, ob du den momentaten Spitzenwert bei stehendem Motor misst von der Spule die voll bestromt wirde (während die andere bei 0 liegt) oder den rms Mittelwert bei drehendem Motor einer Phase über die Zeit gemittelt. Als rms pro Phase darfst du bis 2.3A messen ohne dass der Motor überhitzen würde. Als Spitzenwert pro Phase dann 3.2A. In Summe für beide Phasen sind es niemals 6.4A, sondern höchstens 4.6A.
Angehängte Dateien:
-

IMG_0002.JPG
240 KB
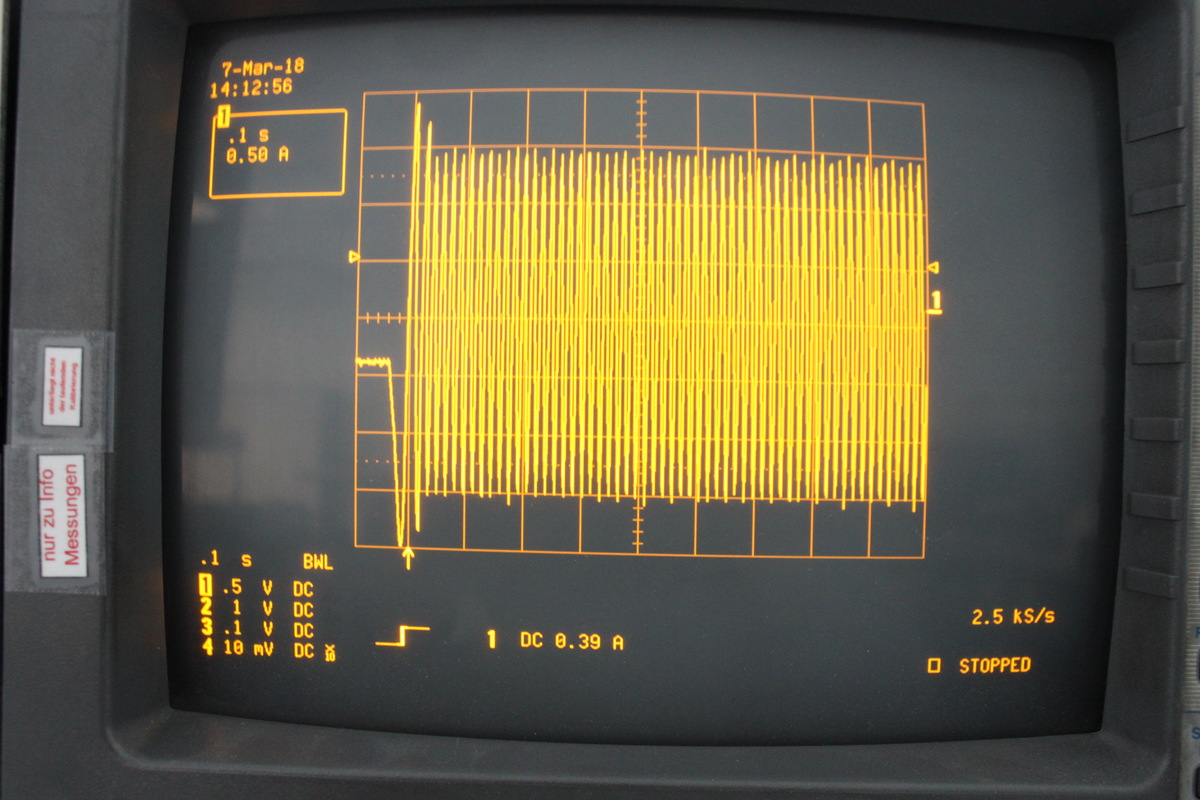
Michael B. schrieb: > Erstmal musst du klären, ob du den momentaten Spitzenwert bei stehendem > Motor misst von der Spule die voll bestromt wirde (während die andere > bei 0 liegt) oder den rms Mittelwert bei drehendem Motor einer Phase > über die Zeit gemittelt. Ich messe den Strom mit einer Stromzange in EINER Phase und sehe mir direkt den Sinus an (32-Mikroschrittbetrieb). Ich habe das gemessene Bild mal angehängt. Der Schrittmotortreiber kann 3A (RMS, pro Phase), der Motor hat eine Angabe von 2,3A/Phase. Ich messe hier aber nur ca 1,5A Spitzenwert, also nur ca 1A RMS, siehe Anhang. Ist meienr Annahme hier richtig, dass der Motor hier nicht mit dem höchstmöglichen Strom, und somit auch Drehmoment, betrieben wird?
Nur der Vollständigkeit halber: Das oben gemessene Signal ist ein schöner Sinus, das ist nur aus Auflösungsgründen nicht sichtbar. Ist aber hier nicht relevant, es geht nur um die Amplitude, die man trotzdem gut ablesen kann.
Chris13 schrieb: > es geht nur um die Amplitude, die man trotzdem gut ablesen kann. Dann ist es die Amplitude von Spitze zu Spitze, also wären 6.4A erlaubt, von +3.2A bis -3.2A. Chris13 schrieb: > Ich messe hier aber nur ca 1,5A Spitzenwert, also nur ca 1A RMS > Ist meienr Annahme hier richtig, dass der Motor hier nicht mit dem > höchstmöglichen Strom, und somit auch Drehmoment, betrieben wird? Richtig. Das kann trotz eingestelltem Chopperstrom von 3A durchaus deshalb passieren, weil bei der Drehzahl der Strom nicht schnell genug ansteigen kann weil die Versorgungsspannung gegen die Motorinduktivität dafür zu niedrig ist. Probiere also noch mal eine geringere Drehzahl.
Michael B. schrieb: > Richtig. Das kann trotz eingestelltem Chopperstrom von 3A durchaus > deshalb passieren, weil bei der Drehzahl der Strom nicht schnell genug > ansteigen kann weil die Versorgungsspannung gegen die Motorinduktivität > dafür zu niedrig ist. Probiere also noch mal eine geringere Drehzahl HAllo, ich habe die Drehzahl nun sehr gering eingestellt, es ändert sich jedoch nur die Frequenz des Sinus, die Amplitude bleibt bei 1,5A Spitzenwert, obwohl ich 2A RMS eingestellt habe (also eigentlich Spitze 1,8A) Woran kann das noch liegen? Kann das auch am Drehmoment liegen, das aufgewendet werden muss? Sprich wenn ich die Last größer mache, sollte dann auch der Strom größer werden?
Sorry, Fehlinformation, ich hatte auch einen anderen Parameter verstellt (man sollte gleiches mit gleichem vergleichen :)) Der Strom ist bei niedriger Umdrehungszahl tatsächlich größer geworden, ich messe jetzt 2A Spitzenstrom (also 4A Spitze Spitze). Ich habe auch genau 2A eingestellt (SW mäßig im Motortreiber), allerdings gehe ich davon aus, dass dies der Effektivwert ist. Wenn ich das nun richtig verstanden habe, sollte ich jedoch, wenn ich einen Strom von 2A einstelle, einen Strom von 2,8A Spitze messen. Bitte um kurze Bestätigung :) Ich werde nun noch ein Finetuning gewisser Parameter machen (z.B. Phasenwiderstand, Induktivität, BEMF Kompensation) um auf die 2,8A zu kommen. Danke!
Mit dem Finetuning schaffe ich es nun auch auf die 2,8A. Für alle zur INfo: Ich habe die K-Werte, die aus den eingestellten Strömen berechnet werden, manuall eingestellt, etwas erhöht (Kwerte für Running, Accelleration, Deceleration, Hold). Damit kann man den Phasenstrom sehr genau einstellen. Vielen Dank für die sehr kompetente Hilfe!! LG
Hallo Chris, verrätst du uns, was das für ein Treiber ist? Die wenigsten Geräte ermöglichen überhaupt Einstellungen am Stromregler. Die von dir genannten Parameter kenne ich eigentlich nur von den Geräten von miControl? Zum Verlauf der Phasenströme bei Mikroschritt habe ich schon einige Blogbeiträge geschrieben. Vielleicht ist das für Dich noch interessant? http://www.schrittmotor-blog.de/stromregelung-von-schrittmotoren-auf-das-abschalten-kommt-es-an/ http://www.schrittmotor-blog.de/stromregler-als-ursache-fuer-positionierfehler-im-mikroschritt/ http://www.schrittmotor-blog.de/positioniergenauigkeit-von-schrittmotoren/ Mit freundlichen Grüßen Thorsten Ostermann
Hallo Thorsten, klar, es ist der L6470H von ST microelectronics. Vielen Dank für die Beiträge, schau ich mir auf alle Fälle an. Eine Frage noch zum Abschluss: Wie hängt der Strom von der Belastung (dem Drehmoment, der ihm entgegengesetzt wird), ab? Ich weiß, dass ein höherer Strom ein höheres Drehmoment bedeutet, aber worauf ich hinauswill: Ich habe nun ein bestimmtes Setup, mit dem ich nun den optimalen (maximalen Strom von 2,8A) eingestellt habe. Was passiert aber, wenn sich das benötige Drehmoment ändert, z.B. halbiert wird, würde dann der Regler auch den Strom halbieren? Mit anderen Worten: Ändert der Treiber den Strom mit dem entgegengesetzten Drehmoment oder ist der Strom über den gesamten Drehmomentbereich gleich? Im ersten Fall würde die Einstellung, die ich gemacht habe, nur wenig Sinn machen.
Chris13 schrieb: > Was passiert aber, wenn sich das benötige Drehmoment ändert, z.B. > halbiert wird, würde dann der Regler auch den Strom halbieren? Der Schrittmotortreiber steuert blind den Spulenstrom und weiß nichts von dem benötigten Drehmoment.
Wolfgang schrieb: > Chris13 schrieb: >> Was passiert aber, wenn sich das benötige Drehmoment ändert, z.B. >> halbiert wird, würde dann der Regler auch den Strom halbieren? > > Der Schrittmotortreiber steuert blind den Spulenstrom und weiß nichts > von dem benötigten Drehmoment. Das beruhigt mich :) vielen Dank!
Chris13 schrieb: > Der Strom ist bei niedriger Umdrehungszahl tatsächlich größer geworden, > ich messe jetzt 2A Spitzenstrom (also 4A Spitze Spitze). Ich habe auch > genau 2A eingestellt (SW mäßig im Motortreiber), allerdings gehe ich > davon aus, dass dies der Effektivwert ist. Nein, man stellt üblicherweise den Spitzenstrom ein. Chris13 schrieb: > Ich werde nun noch ein Finetuning gewisser Parameter machen (z.B. > Phasenwiderstand, Induktivität, BEMF Kompensation) um auf die 2,8A zu > kommen. Man kann eigentlich Phasenwiderstand, Induktivität nicht einstellen, sondern die Werte ergeben sich aus dem Motor. Chris13 schrieb: > Ich habe die K-Werte, die aus den eingestellten > Strömen berechnet werden, manuall eingestellt, etwas erhöht (Kwerte für > Running, Accelleration, Deceleration, Hold). Damit kann man den > Phasenstrom sehr genau einstellen. Ja, man kann für Acceleration und Deceleration den Strom etwas höher einstellen (z.B. 3.5A, aber nicht mehr als der Motor in Sättigung geht) als er als Dauerstrom erlaubt ist denn Beschleunigung und Bremsen treten ja nur kurzzeitig auf bei beiden kann man aber mehr Kraft gebrauchen, bei Running stellt man 2.8A ein und bei Hold weniger damit der Motor abkühlen kann falls die Haltekraft reicht.
Michael B. schrieb: >> Der Strom ist bei niedriger Umdrehungszahl tatsächlich größer geworden, >> ich messe jetzt 2A Spitzenstrom (also 4A Spitze Spitze). Ich habe auch >> genau 2A eingestellt (SW mäßig im Motortreiber), allerdings gehe ich >> davon aus, dass dies der Effektivwert ist. > > Nein, man stellt üblicherweise den Spitzenstrom ein. Klingt, gut, dann passt die Einstellung noch besser :) Michael B. schrieb: >> Ich werde nun noch ein Finetuning gewisser Parameter machen (z.B. >> Phasenwiderstand, Induktivität, BEMF Kompensation) um auf die 2,8A zu >> kommen. > > Man kann eigentlich Phasenwiderstand, Induktivität nicht einstellen, > sondern die Werte ergeben sich aus dem Motor. Ja, das ist mir klar, aber ich gebe dem Motortreiber ja diese Werte bekannt. Ich gehe davon aus, dass die in der Praxis noch ganz genau den Angaben im Datenblatt entsprechen und dadurch auch unterschiede im Strom rauskommen (z.B. Phasenwiderstand ist etwas höher als im DB angegeben). Ich meinte, dass ich den Widerstandswert, den ich dem Motor bekannt gebe, etwas höher ansetzte, damit sollte er auch einen etwas höheren Strom einstellen, oder liege ich hier falsch? Michael B. schrieb: > Ja, man kann für Acceleration und Deceleration den Strom etwas höher > einstellen (z.B. 3.5A, aber nicht mehr als der Motor in Sättigung geht) > als er als Dauerstrom erlaubt ist denn Beschleunigung und Bremsen treten > ja nur kurzzeitig auf bei beiden kann man aber mehr Kraft gebrauchen, > bei Running stellt man 2.8A ein und bei Hold weniger damit der Motor > abkühlen kann falls die Haltekraft reicht. perfekt, genau das war mein Plan...
Chris13 schrieb: > oder liege ich hier falsch? Ja, vermutlich. Der Treiber wird immer versuchen, den eingestellten Strom zu erreichne, wenn er das kann. Ist der Phasenwiderstand zu hoch für die vorhandene Betriebsspannung, kann es das halt nicht. Ist die Induktivität zu hoch für die gewünschte Geschwindigkeit bei vorhandener Betreibsspannung, kann er das halt nicht. Da hilft es dann auch nicht, diese Werte irgendwo einzutragen, sondern nur, die Betriebsspannnug (im Rahmen des zulässigen) zu erhöhen.
Angehängte Dateien:
-

TMCM-1311_Strom.png
40 KB
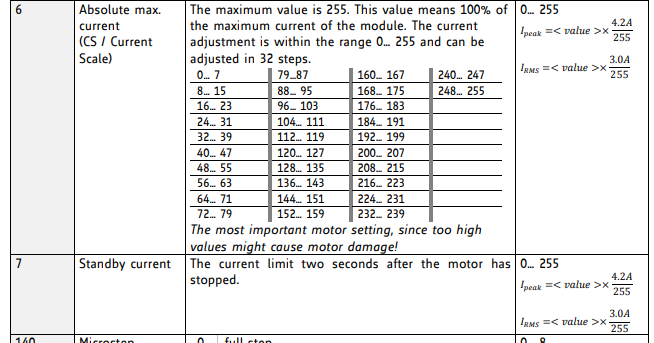
Hallo zusammen, ich muss hier leider auch nochmal reingrätschen. Wir haben einen Trinamic TMCM-1311, hier das Datenblatt: https://www.trinamic.com/fileadmin/assets/Products/Modules_Documents/TMCM-1311_TMCL_firmware_manual.pdf Man kann den absoluten Strom einstellen. IrmsMax sind 3 Ampere. Aber gilt das pro Phase oder insgesamt? Nächstes Problem: Angenommen, ich habe eine quasi perfekte sinusförmige Mikroschritte, der Strom wird per Chopper geregelt. Irms sei auf 3 A eingestellt. Dann bedeutet, dass der maximale Strom in der Chopper Regelung 3*1.41 A sein kann, nämlich im Peak des Sinus. Da die Phasen 90° versetzt sind, teilt sich der Strom auch nicht irgendwie auf beide auf, der Strom in der zweiten Phase ist 0 im Maximum der ersten. Jetzt die Frage: Würde der Motor in dieser Kondition stehen bleiben (mechanisches Gegenmoment), würde dauerhaft ein Strom von 3*1.41 A fließen und den Motor zerstören? Oder "denkt" der Treiber, dass sich die Motorposition weiter gedreht hat und reduziert den Strom wieder? Dankeschön!
Jan K. schrieb: > Aber gilt das pro Phase Natürlich. Jan K. schrieb: > Würde der Motor in dieser Kondition stehen bleiben > (mechanisches Gegenmoment), würde dauerhaft ein Strom von 3*1.41 A > fließen Ja. > und den Motor zerstören Nein. Der Motor ist ja für 2 x 3A (rms) gebaut, und hat in dem Fall weil die andere Spule 0 hat nur 1.4 x 3A zu vertragen (was aber als Verlustleistung, weil bei 1.4-fachem Strom auch die 1.4-fache Spannung entsteht 1.4 x 1.4 = 2-facher Leistung entspricht, also derselben Leistung wie bei 2 x 3A Halbschrittposition).
Danke für deine Antwort! Guck' mal bitte hier: https://catalog.orientalmotor.com/item/all-categories-legacy-products/tegories-pk-series-2-phase-stepping-motors-legacy-/pk266-03a da steht z.B. current per phase = 2.1 A (bipolar). Deiner Erklärung oben nach dürfte ich den Motor bis zu 2x2.1 A RMS in Summe belasten, stimmt das? Bezieht sich das Maximum immer nur auf die thermische Zerstörung? Ich meine, die Isolierung zwischen den Windungen könnte doch auch bei einer Phase bereits kaputt gehen, wenn diese mit > 2.1 A belastet wird und die andere Phase "kalt" bleibt. Oder ist die thermische Kopplung intern so gut, dass das keinen Unterschied macht, welche Phase bestromt wird? Danke dir!
Jan K. schrieb: > Deiner Erklärung oben nach dürfte ich den Motor bis zu 2x2.1 A > RMS in Summe belasten, stimmt das? Natürlich. > Bezieht sich das Maximum immer nur auf die thermische Zerstörung? Im Prinzip ja, bei viel mehr Strom tritt auch irgendwann magneteische Sättigung ein und wenn man es übertreibt auch Entmagnetisierung des Permanentmagneten. > Ich meine, die Isolierung zwischen den Windungen könnte doch auch bei > einer Phase bereits kaputt gehen, wenn diese mit > 2.1 A belastet wird > und die andere Phase "kalt" bleibt. Das hält er aus, Kupfer leitet die Wärme sehr gut. > Oder ist die thermische Kopplung > intern so gut, dass das keinen Unterschied macht, welche Phase bestromt > wird? Eben. Im wesentlichen geht es um die Wärmeabgabe vom Motor an die Umgebung. Baut man einen Lüfter dran oder Wasserkühlung, verträgt der Motor auch mehr Strom. Ist er in Wärmedämmung eingebaut oder arbeitet im Vakuum, darf man vonm weniger ausgehen.
Okay, das ergibt Sinn. Deswegen ist wie oben angemerkt der Maximalstrom in Summe auch bei sin(45°) (beide Phasen), statt bei sin(90°) (nur eine Phase). Denke es hat Klick gemacht, danke.
Ich kann leider nicht mehr editieren... Wir reden hier die ganze zeit vom rms des Sinus der Strom Sollwert Vorgabe durch Mikroschritte oder? Wie passt die chopper Stromregelung da rein? Um den eingestellten Sollwert zu erreichen, müsste die Regelung doch eigentlich einen höheren Maximalwert haben, als ein eingestellter "Irms" oder? Weil die Regelung aber so schnell ist, macht das nix oder wie? Danke!
Michael B. schrieb: > Ist der Phasenwiderstand zu hoch für die vorhandene Betriebsspannung, > kann es das halt nicht. Wenn man in einem Bereich ist, wo der Phasenwiderstand den auf Grund der Betriebsspannung fließenden Strom begrenzt (bei stehendem Motor), ist die Betriebsspannung für einen Betrieb mit Stromregelung viel zu niedrig.
Jan K. schrieb: > Weil die Regelung aber so schnell ist, macht das nix oder wie? Jein. Im Prinzip hast du recht: Eine Chopper Regelung, die auf 1A Maximalstrom eingestellt ist, lässt den Strom bis 1A steigen und schaltet dann für eine definierte Zeit, z.B. 10us ab, dabei fällt der Strom wieder, z.B. um 10% also auf 0.9A. Damit bekommt der Motor eher nur 0.95A im Mittel ab statt 1A. Die Leute leben damit und korrigieren das nicht, obwohl die genannten Zahlen realistisch sind.
Okay, das heißt bei all der Betrachtung oben wird die chopper Stromregelung als ideal angenommen?
Jan K. schrieb: > Weil die Regelung aber so schnell ist, macht das nix oder wie? Sehe es einfach anders rum. Eine Spule wehrt sich wegen ihrer Induktivität gegen Stromänderungen, d.h. die Regelung muss nicht sonderlich schnell sein, sondern nur ausreichend schnell bezogen auf die Induktivität der Spule, um bei der Stromregelung die tolerierbare Schwankungsbreite des Stromes nicht zu überschreiten.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.