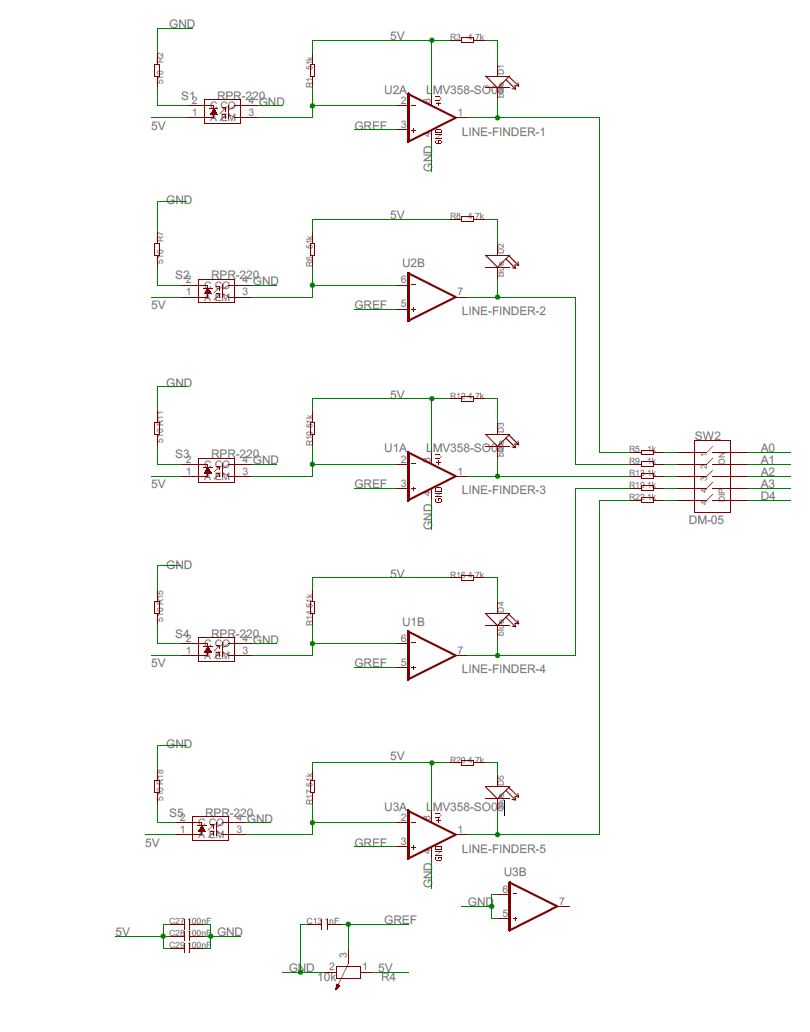
Hi kann mir jemand die Schaltung im Anhang ein bisschen erklären? Ich weiß das es 5 analoge Sensoren sind die eine Versorgungsspannung von 5V haben. Warum brauche ich die OP Verstärker und was machen sie? Für was sind die 1 K Widerstände hinter dem Schalter? Die LED wird benutzt um den Betriebszustand anzuzeigen?
Angehängte Dateien:
-

abc.JPG
71 KB
Beitrag #5345091 wurde von einem Moderator gelöscht.
Hallo, > Fabsen schrieb: > Hi kann mir jemand die Schaltung im Anhang ein bisschen erklären? ok, kann ich machen. > Ich weiß das es 5 analoge Sensoren sind die eine Versorgungsspannung von > 5V haben. Gezeichnet sind nur Optokoppler. Zu der Typangabe RPR-200 findet man aber einen Reflexkoppler. http://rohmfs.rohm.com/en/products/databook/datasheet/opto/optical_sensor/photosensor/rpr-220.pdf Der sollte Gegenstände im Abstand von ca. 2...20mm gut detektieren können. > Warum brauche ich die OP Verstärker und was machen sie? Die sind als Komparator geschaltet und werden so eingestellt, dass bei einer bestimmten Schaltschwelle aus dem eher analogen Signal des Reflexkopplers ein saubere digitales Schaltsignal erzeugt wird. https://www.elektronik-kompendium.de/sites/slt/0311261.htm Als Schaltschwelle dient das Signal GREF, welches mit dem Poti R4 einstellbar ist. > Für was sind die 1 K Widerstände hinter dem Schalter? Damit entkoppelt man den Ausgang des OPV von nachfolgenden Schaltungen etwas. Das macht sich vor allem dann gut, wenn in nachfolgenden Schaltungen mal ein Kurzschluss ist (Strombegrenzung). > Die LED wird benutzt um den Betriebszustand anzuzeigen? Ja, wobei die nicht leuchten, wenn der Sensor was sieht, sondern wenn der Sensor quasi nichts sieht. Wenn der Sensor was detektiert, zieht er den Pegel an neg. Eingang des OPV auf gnd runter. Der Ausgang des OPV geht dann aber auf HIGH (LED geht aus). Noch was zur Form: Die Schaltung ist gruselig (schlampig gezeichnet). -> mal gnd unten, mal gnd oben, bei 5V das gleiche Elend. -> Für diese virtuellen Verbindungen z.B. GREF gibt es in der kleinen Schaltung keinen Grund, außer es max. unübersichtlich zu machen. -> Die Pegel 5V am zweiten und vierten OPV hängen einfach so in der Luft. -> Die Block-C C27....29 kann man auch dahin zeichen, wo sie hingehören. -> Für gnd und 5V gibt es nicht mal ein vernünftiges Schaltzeichen Gruß Öletronika
okay top, danke ,das habe ich alles verstanden, was ich mich aber nun frage. Wenn ich ein analoges Signal habe, warum leg ich das nicht einfach auf einen Analogen Eingangspin vom Microcontroller bzw ADC? Oder macht man das falls der µC keinen internen adc hat?
dummschwaetzer schrieb: > hier im Sinne von komperator Der LM393 ist ein echter Komparator. Viele OPV haben Probleme mit starker Übersteuerung am Eingang.
Fabsen schrieb: > Wenn ich ein analoges Signal habe, warum leg ich das nicht > einfach auf einen Analogen Eingangspin vom Microcontroller bzw ADC? Oder > macht man das falls der µC keinen internen adc hat? Weil ein analoges Signal keinen Interrupt auslösen kann, weil das Auslesen mehrerer Analogeingänge viel länger dauert und weil man die Analogeingänge vielleicht für wichtigeres braucht. Wenn dass alles keine Rolle spielt kann man auch per ADC einlesen und die benötigten Schaltschwellen experimentell ermitteln.
Angehängte Dateien:
-

dVkQU.jpg
240 KB -

1465_original.png
300 KB
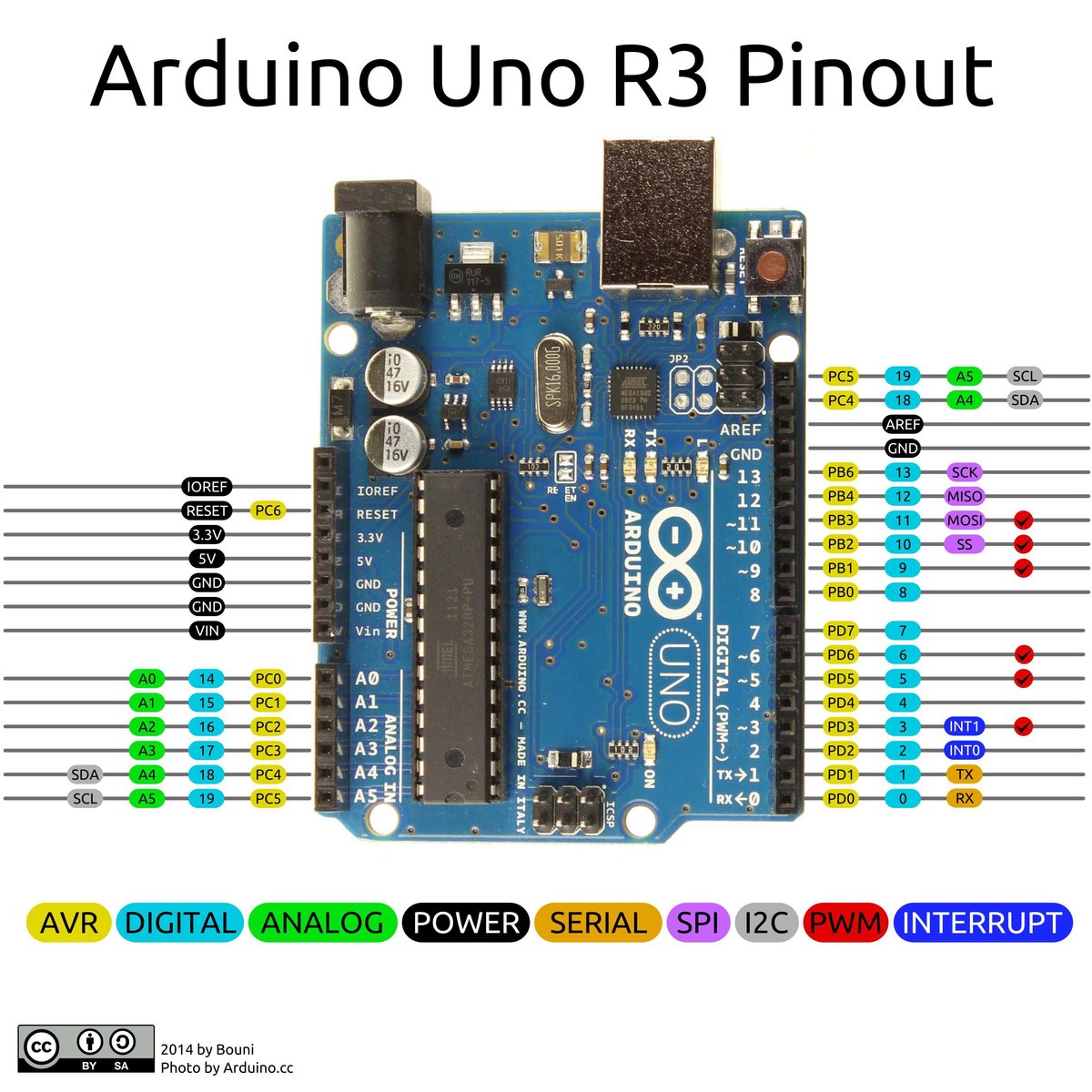
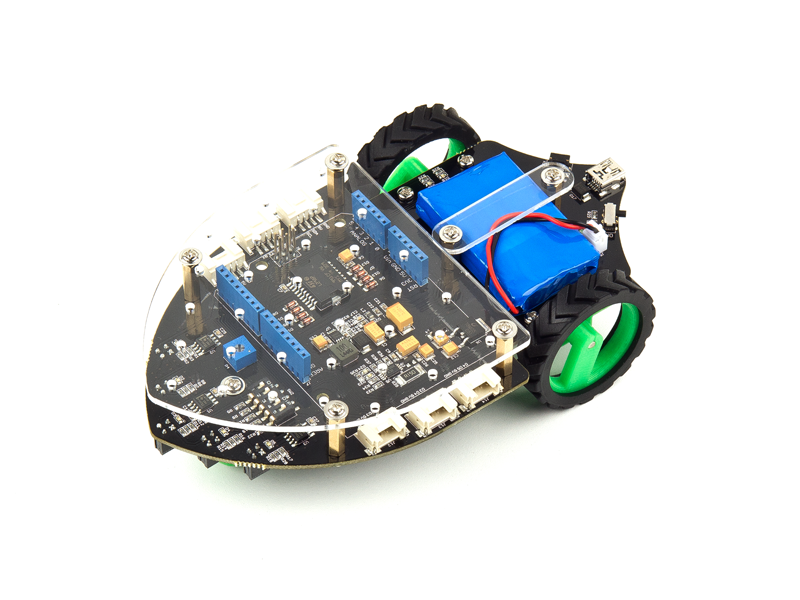
okay danke Ich bin gerade noch im Studium und wollte nebenbei mich ein bisschen mit Roboter beschäftigen. Jetzt hab ich mir einen Shield Bot zugelegt, der ist Arduino Kompatibel, kann aber zurzeit nur durch seine Reflexionssensoren einer Linie folgen.Jetzt hab ich mir überlegt da wir eh gerade Leiterplatten Design haben, ich mach mir eine kleine Erweiterungsplatine mit weiteren Sensoren, damit ich den Roboter durch zb Infrarotsensoren oder Ultraschallsensoren alleine durch einen Parcour mit Hindernissen fahren lassen kann. Jemand irgend welche Vorschläge oder Erfahrungen welche Sensoren sich gut eignen oder ob ich zu analogen oder digitalen greifen soll. Es sollten schon SMD Sensoren sein zum löten.Die Linefindersensoren sind leider an die einzigen analogen und digitalen Pins A0-A3 und D4 angeschlossen, das bedeutet das ich doch lieber zu analogen greife und das Signal per OPV Schaltung Digitalisiere oder. Ich habe mal ein paar Anhänge angefügt und bin über jeden Input happy :):)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.