{kind=link}
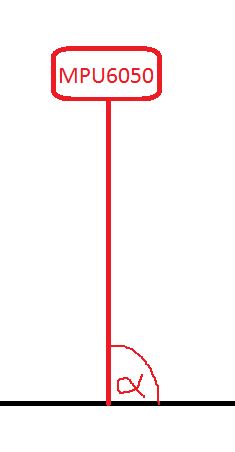
Hallo liebes Forum, wie im Anhang, zugegeben mehr schlecht als recht, gezeichnet, möchte ich den Winkel von einem Stab zur Waagerechten messen (im Bereich +-10°, der Stab bewegt sich dabei mit sich ändernden Geschwindigkeit um den Drehpunkt Die Geschwindigkeit der Änderungen liegt im Bereich von +-10°/s). Der Stab hat dabei jedoch keine fixe Verbindung zu einer Bodenplatte und somit kann ich keine Potis o.Ä. in der Drehachse verwenden. Bisher habe ich den MPU6050 ganz unten an dem Stab montiert und über 2 Beschleunigungen den Winkel bestimmt. Das funktioniert zwar zuverlässig, jedoch ist es optisch nicht gerade eine schöne Lösung. Oben auf dem Stab befindet sich viel Elektronik und der Sensor ist als einziges unten angebracht. Viel besser würde mir gefallen wenn der Sensor ebenfalls oben (so wie im Bild gezeichnet) angebracht ist. Wenn ich den Sensor allerdings oben montiere, misst er zusätzlich die Fliehkraft (wahrscheinlich vernachlässigbar bei 30cm Stablänge und dieser Drehrate) und die Beschleunigung welche durch den sich ändernden Winkel auftritt. Kann dennoch ein stabiles Winkelsignal erzeugt werden? Kalmanfilter vorausgesetzt. Ich dachte zuerst daran, mit dem Gyro und der Stablänge die am Sensor auftretende Beschleunigung zu berechnen, von dem Messsignal des Beschleunigungssensors abziehen und dann den Winkel zu berechnen, allerdings kann ich mir nicht vorstellen, dass dabei noch ein verwertbares Winkelsignal entsteht.. Habt ihr vielleicht eine Idee? Vielen Dank im Voraus :-)
Angehängte Dateien:
-

Winkel.JPG
15 KB
MiMa schrieb: > Kann dennoch ein stabiles Winkelsignal erzeugt werden? ja. Einfach ins Physikbuch schauen. Ins Mathebuch ebenfalls, da das Thema Koordinatentransformation durchlesen. Man muss natürlich etwas denken und rechnen...
Schreiber schrieb: > MiMa schrieb: >> Kann dennoch ein stabiles Winkelsignal erzeugt werden? > > ja. Einfach ins Physikbuch schauen. > Ins Mathebuch ebenfalls, da das Thema Koordinatentransformation > durchlesen. > Man muss natürlich etwas denken und rechnen... Immer diese spitzen Kommentare.. Dass es theoretisch möglich ist habe ich ja bereits geschrieben ;-) Mir geht es allerdings darum ob es mit diesem Sensor überhaupt möglich ist Messwerte in dieser Qualität zu erhalten. Zudem gibt es einige Tricks zum rechnen mit Sensordaten, welche in keinem meiner Physik oder Mathebücher stehen. Beispielhaft hierfür steht das Komplementärfilter
MiMa schrieb: > Dass es theoretisch möglich ist habe ich ja bereits geschrieben ;-) > Mir geht es allerdings darum ob es mit diesem Sensor überhaupt möglich > ist Messwerte in dieser Qualität zu erhalten. Ja, nur wird es ohne Mathe nicht gehen. Bei einer Bewegung um eine Achse (rechts-links) wird es einfacher, wie wenn noch eine zweite (vorne-hinten) dazukommt.
Welche Auflösung und Genauigkeit der Winkelmessung möchtest du erreichen?
Schreiber schrieb: > MiMa schrieb: >> Dass es theoretisch möglich ist habe ich ja bereits geschrieben ;-) >> Mir geht es allerdings darum ob es mit diesem Sensor überhaupt möglich >> ist Messwerte in dieser Qualität zu erhalten. > > Ja, nur wird es ohne Mathe nicht gehen. > Bei einer Bewegung um eine Achse (rechts-links) wird es einfacher, wie > wenn noch eine zweite (vorne-hinten) dazukommt. Die Mathe dahinter stellt ja theoretisch kein Problem dar. Das Gyrosignal differenzieren um die Winkelbeschleunigung zu erhalten, multipliziert mit dem Abstand Sensor-Drehpunkt und schon hat man die Komponente der Erdbeschleunigung jeweis in X und Y. Für Z eben das Ganze mit der Zentripetalbeschleunigung. Nur kann ich mir nicht vorstellen, dass ein so wages Konstrukt in der Praxis auch funktioniert. Die "rohen" Sensorsignale sind doch sehr stark verrauscht.. Mit der Implementierung ist viel Aufwand verbunden und deshalb hätte ich gerne eure Meinung :-) Benötige leider beide Achsen. butsu schrieb: > Welche Auflösung und Genauigkeit der Winkelmessung möchtest du > erreichen? Die absolute Genauigkeit ist nahezu komplett egal, da eine Abweichung durch den nachgeschalteten Regler ausgeglichen wird. Da sind auch 10° Abweichung kein Problem. Driften sollte der Wert wenn möglich nicht mehr als 2°/min (nur als Richtwert, habe nicht getestet wo die Grenzen liegen). Naja das ist abhängig. Bei "großer" Auslenkung von +-5° zur Vertikalen und/oder großen Winkelgeschwindigkeiten bzw. Winkelbeschleunigungen reicht eine Genauigkeit von +-1° komplett aus. Wenn sich das System allerdings eingependelt hat und gerade steht bzw. sich kaum noch bewegt wäre eine Abweichung <0.1° wünschenswert. Das habe ich bisher mit dem Sensor schon erzielt, allerdings nur weit unten beim Drehpunkt montiert damit ich möglichst wenig Einfluss von den anderen Beschleunigungen bei der Messung habe. Ihr merkt schon. Es wird eine Art invers-inverses Pendel :-)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.