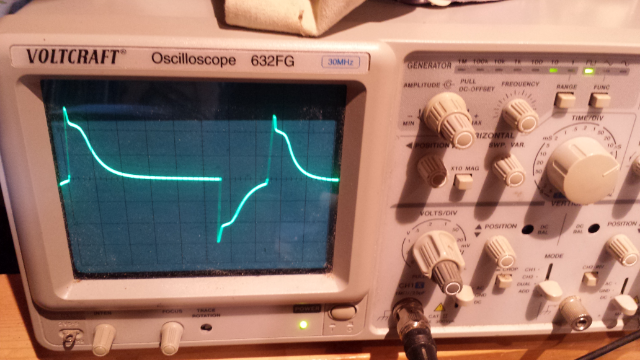
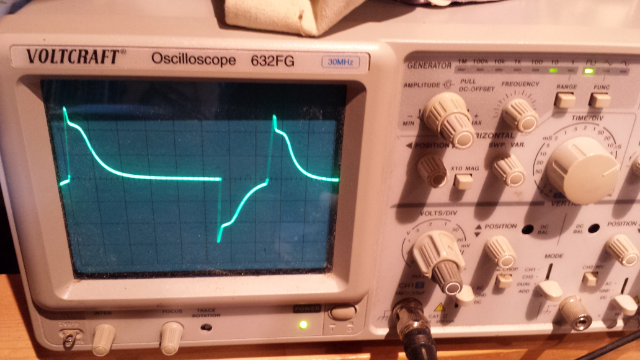
Hallo, möchten einen Signalgeber nachbauen, für eine Induktionsschleife. Habe die Frequenz gemessen am Oszi sind etwa 18Khz auf dem Foto bei f=1/t und 55 Microsekunden fpr eine Periodendauer. Hat vielleicht jemand eine Idee, wie ich das Signal erzeugen kann?
Angehängte Dateien:
-

Robomow.jpg
320 KB
Beitrag #5400140 wurde von einem Moderator gelöscht.
Angehängte Dateien:
-

18kHz_Generator.png
5,2 KB
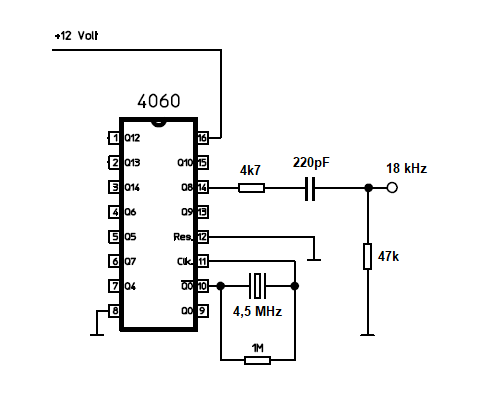
Mit diesem 18kHz Generator und dem 220pF Kondensator in der Ausgangsleitung bekommst Du eine ähnliche Kurve auf dem Oszilloskop. Wenn Du damit zufrieden bist, kannst Du die erforderliche Endstufe dafür entwickeln.
Thomas G. schrieb: > Hat vielleicht jemand eine Idee, wie ich das Signal erzeugen kann? Wenn das die einzige Anforderung ist,dann nimm einen Arbiträrgenerator...
Thomas G. schrieb: > Hat vielleicht jemand eine Idee, wie ich das Signal erzeugen kann? Woher stammt dieses Signal, wo gemessen? Das ist ein Rechtecksignal über einen Kondensator, Puls/Pausezeiten sind nicht 50/50...
Das Signal habe ich aus einem Leit bzw. Begrenzungsdraht für einen Mähroboter, der an dem im Erdreich verlegten Kabel entlangfahren soll oder die Richtung wechselt, wenn er darauf trifft. Sorry, ich habe das Signal falsch abgelesen, bei einer Periodendauer sind es 75 Mikrosekunden, somit etwa 13,333 Khz. Einen Funktionsgenerator habe ich auch noch rum zu liegen, mir ist nur nicht klar, wie ich die Pausenzeit in der dargestellten Periode hin bekomme, für die richtige Frequenz.
Angehängte Dateien:
-

RobomowSignal75.PNG
7,3 KB
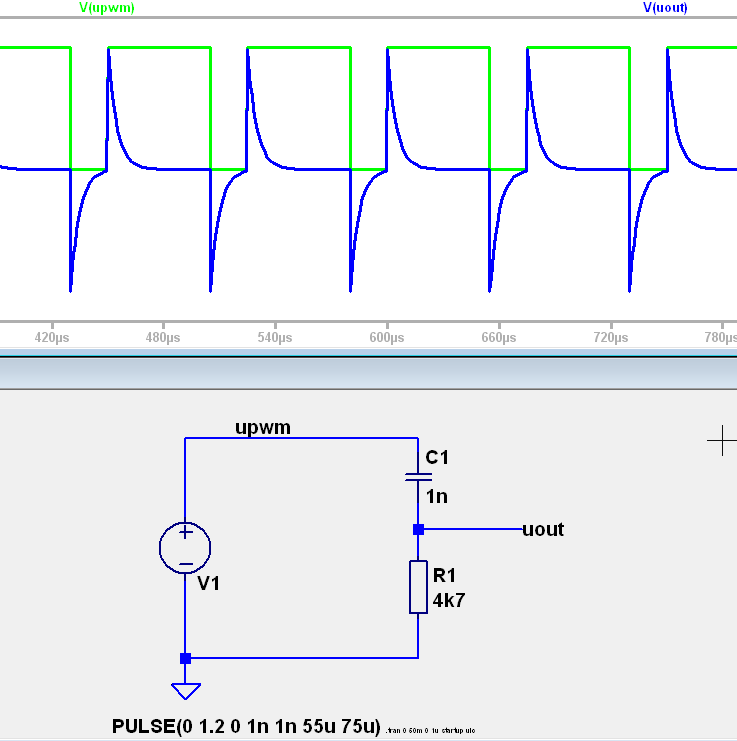
Thomas G. schrieb: > Das Signal habe ich aus einem Begrenzungsdraht für einen Mähroboter Auf diesen Draht wird vermutlich einfach ein Rechteckstrom gegeben. > Das Signal habe ich aus einem Begrenzungsdraht für einen Mähroboter Und zwar wie gemessen? Durch direkten Anschluss der Messklemmen? Zwischen wo und wo? Sieht das dann immer gleich aus (Amplitude)? > Das Signal habe ich aus einem Begrenzungsdraht für einen Mähroboter Und du willst (ziemlich) genau dieses Signal mit dieser "Entladekurve" nachbilden? So, dass es hinterher auf dem Oszilloskop ähnlich aussieht? Dann ist der Ansatz über den RC-Differenzierer (Hochpass) prinzipiell der Richtige... Thomas G. schrieb: > Einen Funktionsgenerator habe ich auch noch rum zu liegen, mir ist nur > nicht klar, wie ich die Pausenzeit in der dargestellten Periode hin > bekomme, für die richtige Frequenz. Stell den FG auf Rechteck und dann das Tastverhältnis passend ein...
Lothar M. schrieb: >> Das Signal habe ich aus einem Begrenzungsdraht für einen Mähroboter > Und zwar wie gemessen? Durch direkten Anschluss der Messklemmen? > Zwischen wo und wo? Sieht das dann immer gleich aus (Amplitude)? Habe den Signalgeber abgeklemmt und einen 12 Ohm Widerstand in eine kurze Leitung eingeschleift. Bei 100m Signalkabel für 1,5mm2 denke ich, ist der Widerstand aber zu hoch, bei 0,017 Ohm pro Meter Kupferdraht. Ich werde mal mit 1-2 Ohm das Signal noch einmal prüfen und berichten
Angehängte Dateien:
-

Robomow2.jpg
320 KB -

Robomow.jpg
320 KB
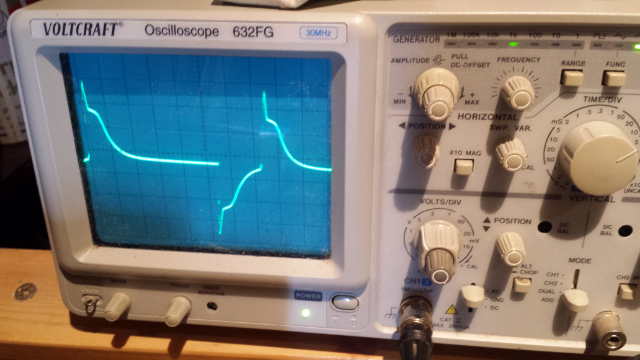
So, habe noch mal mit einem 2,7Ohm Widerstand gemessen und festgestellt, dass sich das Signal nicht stärker geändert hat, die Amplitude ist zwar gesunken durch den geringeren Widerstand, aber das Signal ist soweit gleich geblieben. Ich denke mit einem RC Glied werde ich das Signal schon hinbekommen. Berichte dann später noch einmal ob es so funktioniert.
Angehängte Dateien:
-

13kHz_Generator.png
6,9 KB
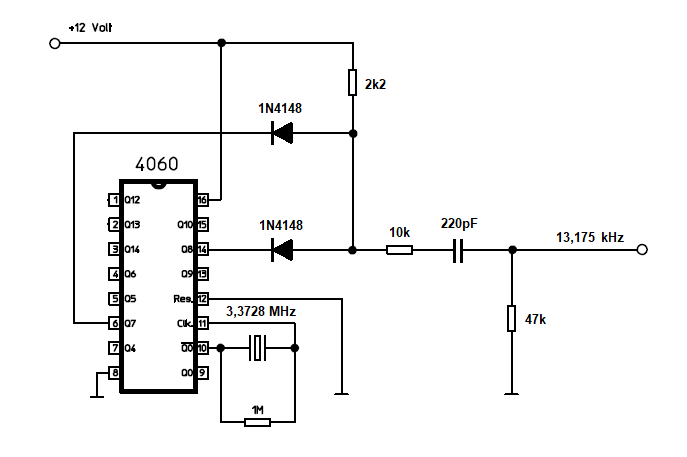
Mani W. schrieb: > Puls/Pausezeiten > sind nicht 50/50... Lothar M. schrieb: > Stell den FG auf Rechteck und dann das Tastverhältnis passend ein... Stimmt. Erst wenn es mit dem FG funktioniert kann über eine Schaltung in Hardware nachgedacht werden. Der Schaltplan ist nur ein Beispiel.
Lothar M. schrieb: > Auf diesen Draht wird vermutlich einfach ein Rechteckstrom gegeben. Das Signal muss in einer Weise moduliert sein, dass der beim Überfahren des Induktionsdrahtes erfolgende Polaritätswechsel erkannt werden kann. Damit wird die Inside-/Outside-Erkennung gemacht. Das kann durch Impulspakete mit wechselndem Tastverhältnis oder Modulation mit einem Bitmuster erfolgen. Mehr Details dazu gibt's beim Ardumower-Projekt: http://wiki.ardumower.de/index.php?title=Schleifensender#Begrenzungsschleife
Die Inside-/Outside-Erkennung ist bei diesen Geräten ja ein muß, der Roboter soll sofort die Arbeit beenden, wenn der Arbeitskreis verlassen wird, schon aus Sicherheitsgründen. Auch daran zu sehen, wenn man das Signalkabel verpolt, kann der Roboter nicht aktiviert werden. Das ausgestrahlte Signal ist in diesem Fall konstant( positive und negative Welle), mir ist nur nicht klar, wie ich Impulsdauer und Impulspause ( Verhältnis 1:1) hin bekommen kann?
Thomas G. schrieb: > Die Inside-/Outside-Erkennung ist bei diesen Geräten ja ein muß, der > Roboter soll sofort die Arbeit beenden, wenn der Arbeitskreis verlassen > wird, schon aus Sicherheitsgründen. Es ist auch wichtig, dass die Inside-Erkennung auch funktioniert, wenn sich der Robo zwar im Inneren, aber weit entfernt vom Kabel befindet (also zB in der Mitte des 1000m² Gartens). Falls das Signal ausfällt, muss er stoppen, da er in diesem Fall ein Überfahren der Begrenzung nicht mehr feststellen könnte. Die Signal-Erkennung muss also auch durchaus empfindlich sein.
Hallo Wie kann man die Induktionsschleife abfragen. Bei meinem Rasenroboter Husqvarna 430x gibt es den Eco Modus, das bedeutet wenn der Rasenroboter in der Ladestation steht ist die Induktionsschleife Ausgeschaltet. Wenn er wieder anfängt zu mähen schaltet er 4 Sekunden vorher die Induktionsschleife wieder an. Ich möchte gerne eine Garagentorsteuerung realisieren indem ich die Indiktionsschleife abfrage und zum schalten verwende.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.