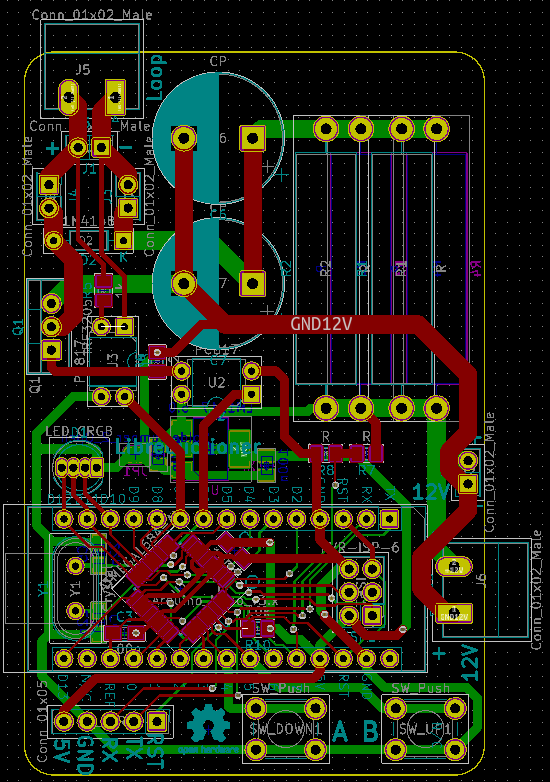
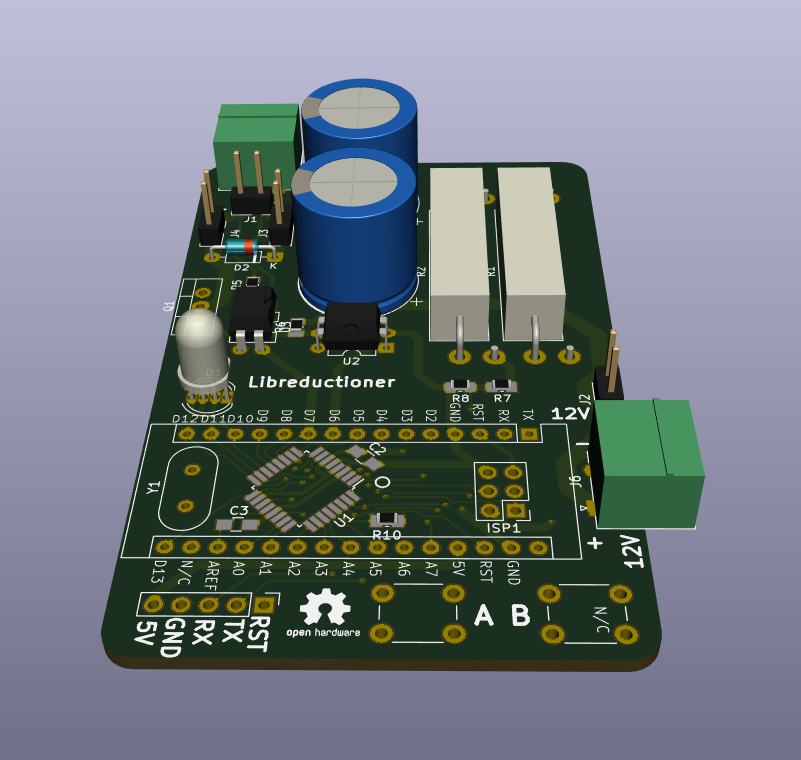
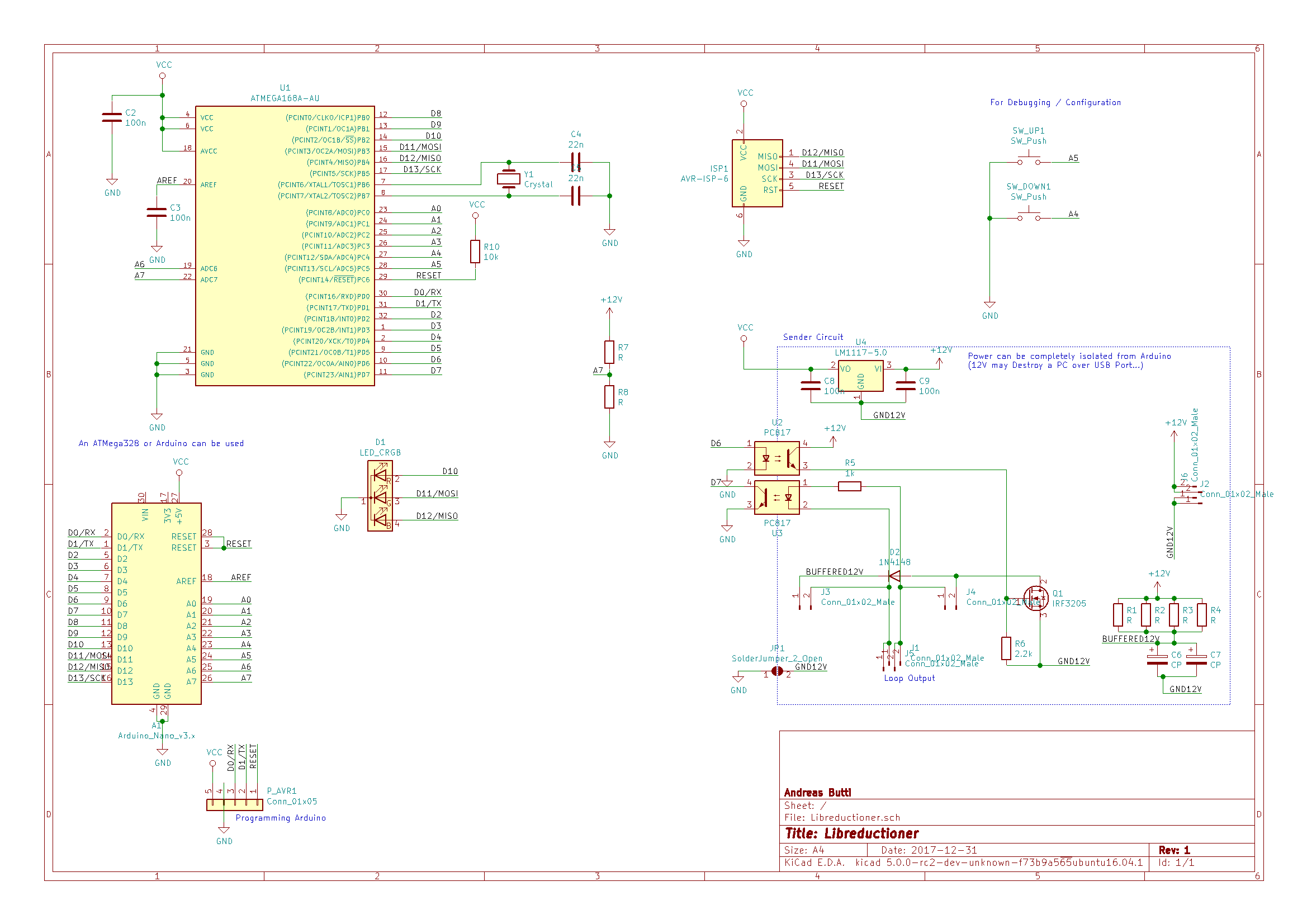
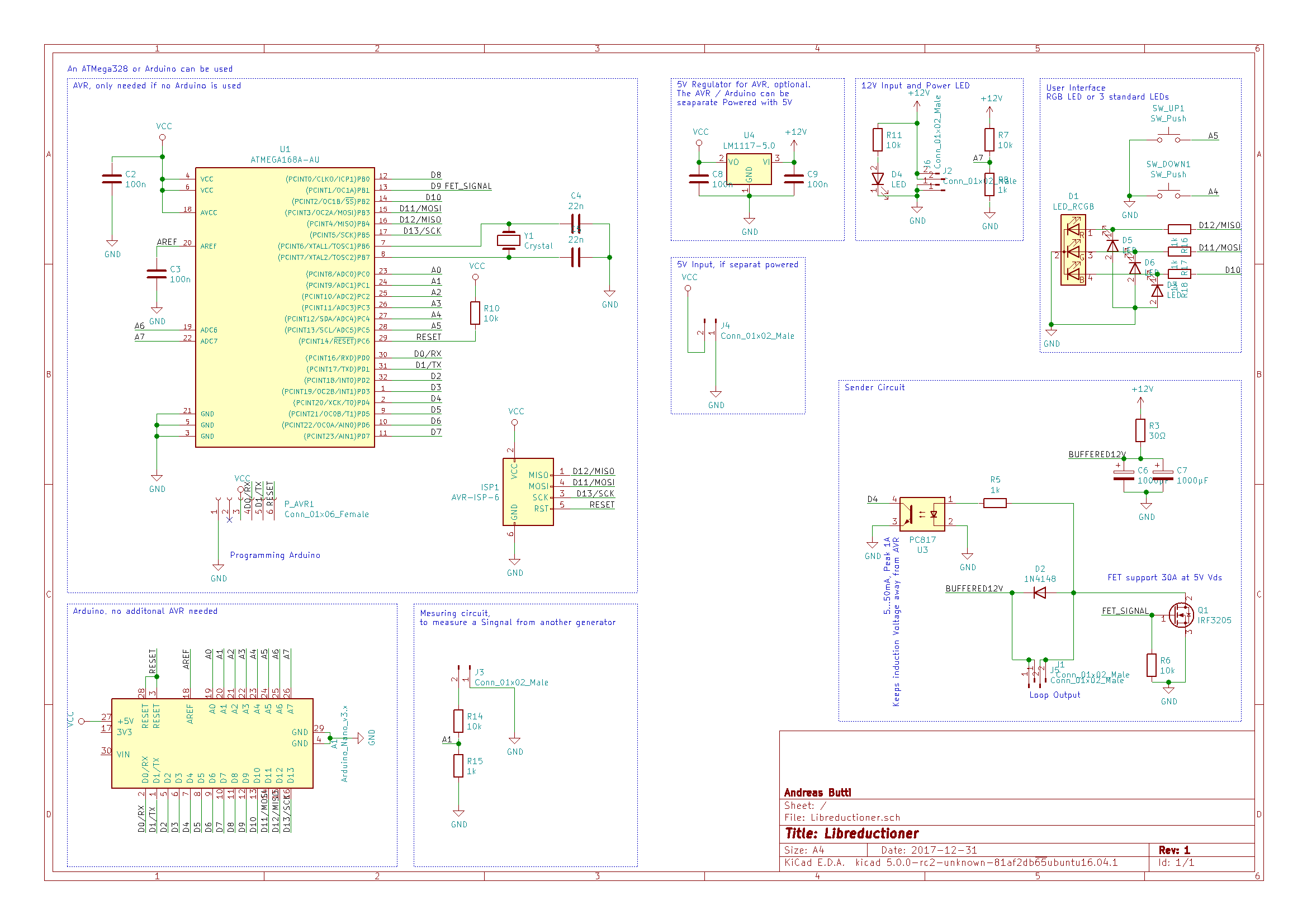
Hallo Die kleinen Elektrischen Rasenmäher brauchen meistens eine Induktionsschleife, um die Ränder zu erkennen. Diese wird normalerweise über die Ladestation angeschlossen und mit Strom versorgt. Sollte jetzt aber zusätzlich ein zweiter Bereich mit einer Induktionsschleife versorgt werden, bei der womöglich nicht mal eine Steckdose in der Nähe ist, dann wird es schon schwieriger. Man findet recht wenig, und schon gar nichts open source. Darum habe ich mich jetzt einfach selbst an den Bau eines Zusatzsenders gemacht, und werde diesen Open Source (GPL) veröffentlichen. Verbrauch ist laut meinem Labornetzteil ca. 1W bei 12V, somit sollte dies auch mit Solar & Akku gespiesen werden können (natürlich kein 24/7 Betrieb). Der Aufbau mit dem Steckbrett hat bereits funktioniert. Platine habe ich designt, aber noch nicht bestellt. Aktuell getestet habe ich mit einem Landroid Worx, sollte aber mit ein wenig Codeanpassungen auch für andere funktionieren. Werde ich später noch angehen. Ich habe das Board so designt, das entweder ein Arduino Nano aufgesteckt werden kann, oder ein AVR eingelötet werden kann. Durch entfernen der Jumper kann das Board direkt mit einem Sender verbunden werden, um das Signal zu messen. Da fehlt nur noch die Software dazu. Das Projekt ist auf Github zu finden, aktuell noch work in progress. https://github.com/andreasb242/Libreductioner Ich habe die Bilder mal angehängt. Die Sourcen werde ich anhängen, wenn sie auch wirklich mit dem Board laufen... (die auf Github liefen auf dem Steckbrett) Wer auch Interesse an sowas hat, soll mal prüfen ob das Board seine Anforderungen erfüllt. Kritik ist natürlich erwünscht, sonst müsste ihr nicht hier posten... Bei den Widerständen habe ich etwas übertrieben, ich habe jetzt 4*4W parallel, weil ich gelesen habe dass dies nötig sei. Natürlich können auch weniger eingelötet werden... Von daher ist dies nur unschön, aber kein Problem. mfg Andreas
Angehängte Dateien:
-

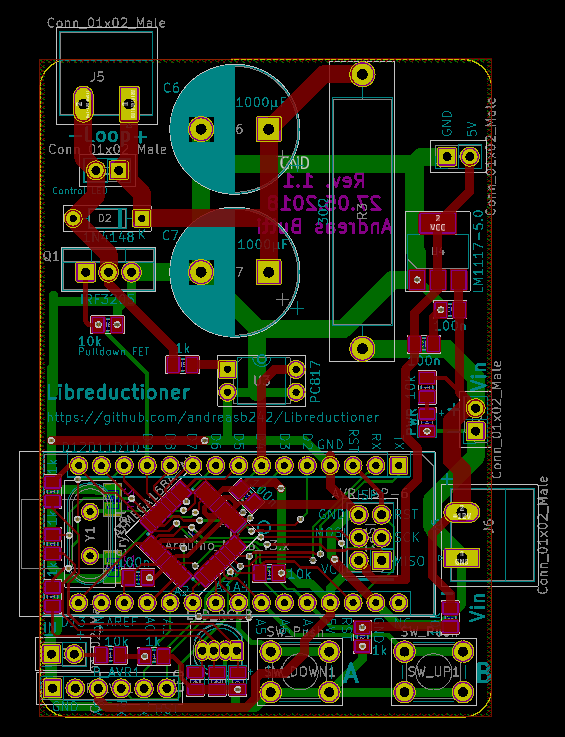
Board.png
50 KB -

Board3d.png
130 KB -

Circuit.png
40 KB -

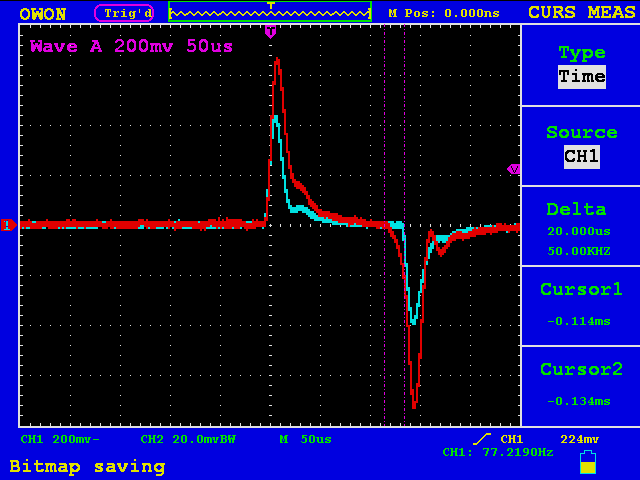
Signal.png
4,9 KB
Nett! Auf Signal.png sind 2 Signale zu sehen: Ist das Original & Kopie? Ist das Spektral auch 'in Ordnung' und stört keinen Funker?
Angehängte Dateien:
-

Loop.png
4,1 KB -

Resistor.png
4,2 KB
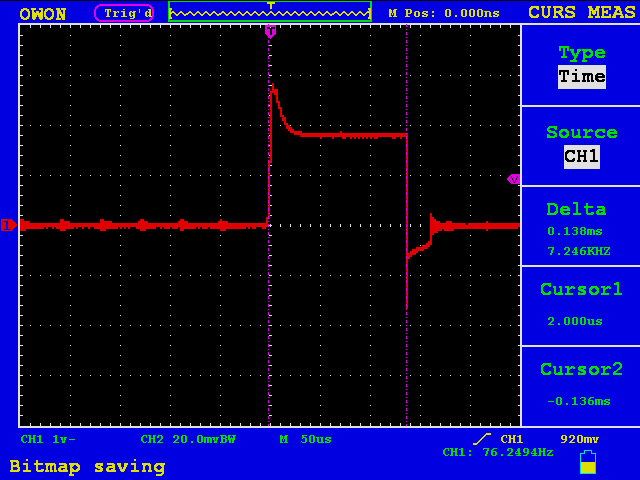
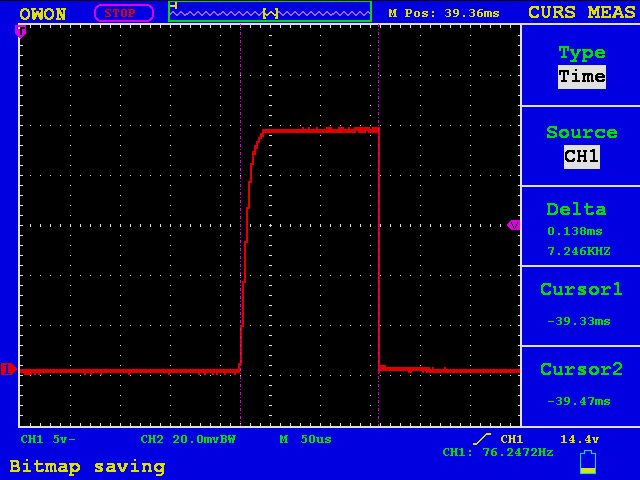
Funky schrieb: > Nett! > Auf Signal.png sind 2 Signale zu sehen: Ist das Original & Kopie? Genau, mein Magnetfeld ist aktuell etwas höher (in rot), ich kann aber aktuell nicht weiter runter, da die FET Treiberspannung und die Ausgangsspannung zusammen gehängt sind. Werde ich bei der Platine noch korrigieren. (Also 12V ist nicht ganz korrekt beschriftet, wird wohl eher 9V oder so sein) > Ist das Spektral auch 'in Ordnung' und stört keinen Funker? Ich habe bisher nur mit der Spule gemessen, ich sollte dies aber auf jeden Fall noch mit einer Antenne prüfen, und da das Spektrum anschauen. Das Magnetfeld ist nicht all zu weit messbar, so 1m ausserhalb des Kabelkreises praktisch weg. Ich war aber etwas verblüfft, ich habe zwei Messungen am original Sender angehängt: Eins mit dem Loop dran, da sieht man auch ein kleines schwingen am Ende, und eins mit einem Widerstand verbunden. Erwartet hätte ich, dass das Signal über einen Tiefpass gefiltert wurde, wie bei Ethernet oder so. Aber wie man sieht: ziemlich rechteckig. Von daher dürfte es eigentlich keine Probleme geben, mein Signal sieht da ziemlich gleich aus... Muss ich morgen mal prüfen. mfg Andreas
Leider sind diese "Sender" für Mähroboter ziemlich unschöne HF Schleudern. Wie sowas generell zum Verkauf zugelassen werden kann ( Prüfung B-Netzagentur bzw. generelle Zulassung bezüglich EMV und HF Abstrahlung ) ist mir ein Rätsel. Aber in DE sind wirtschafliche Interessen ja eine heilige Kuh. Genau wie WLAN per Steckdose. Seit mein Nachbar einen solchen Mähroboter hat, ist bei mir auf Langwelle und Mittelwelle kein Empfang mehr möglich. Und auch wenn es in DE keine Rundfunksender mehr auf MW und LW gibt, so gibt es trotzdem noch Funkamateure die Fernempfang betreiben möchten. Und da sind nicht nur Rundfunksender zu empfangen, im Gegenteil, alle anderen exotischen Aussendungen machen diese Bänder erst spannend. Aber das ( OT ) nur am Rande.
Andreas B. schrieb: > Verbrauch ist laut meinem Labornetzteil ca. 1W bei 12V > Bei den Widerständen habe ich etwas übertrieben, ich habe jetzt 4*4W > parallel, weil ich gelesen habe dass dies nötig sei. Wenn die Schaltung nur 1W aufnimmt dann kann die Durchschnittsleistung am Widerstand auch nicht höher sein. Wieviel Ohm hat der Widerstand überhaupt? Sascha
Super Projekt! Was mich im allgemeinen interessieren würde wäre: Hin und Rückleiter liegen parallel, direkt nebeneinander im Boden. Da fährt der Roboter einfach drüber (ist so gewollt). Hebt sich das Magnetfeld so "gut" auf, dass es der Roboter nicht "sieht" oder steckt da mehr dahinter?
Andreas I. schrieb: > Hebt sich das Magnetfeld so "gut" auf, dass es der Roboter nicht "sieht" > oder steckt da mehr dahinter? Im Fernfeld schon. Man kann den Effekt noch verbessern, indem man die Kabel miteinander verdrillt.
Sascha W. schrieb: > Andreas B. schrieb: >> Verbrauch ist laut meinem Labornetzteil ca. 1W bei 12V > >> Bei den Widerständen habe ich etwas übertrieben, ich habe jetzt 4*4W >> parallel, weil ich gelesen habe dass dies nötig sei. > > Wenn die Schaltung nur 1W aufnimmt dann kann die Durchschnittsleistung > am Widerstand auch nicht höher sein. > Wieviel Ohm hat der Widerstand überhaupt? 125Ω je Stück, also 31.25Ω. Bei meinen ersten Tests im kleinen sind die 0.25W Widerstände ziemlich heiss geworden, das Signal war aber viel zu schwach. Bei einem Eigenbau Projekt hat einer 3A bei 24V auf die Leitung gegeben. Das Rasenmäher Netzteil hat 20V, 3A und wenn er lädt stellt er ab. Messen konnte ich den Strom nicht, das sind so blöde wasserdichte Stecker, und das Signal war einfach zu kurz für das Multimeter. Da bin ich halt auf Nummer sicher gegangen, und habe mir Widerstände mit mehr Leistung besorgt. Die Leistung am Labornetzteil habe ich aber erst abgelesen, als es wirklich funktioniert hat ;-) mfg Andreas
Hallo, sehr interessantes Projekt, habe auch einen Worx-Mäher im Einsatz. Ich kann den “Sendeteil” deines Schaltplans leider nicht gut entziffern, sind J3 und J4 im Betrieb gebrückt? D2 ist eine Freilaufdiode für die Schleifeninduktivität? Ich würde mich freuen, wenn du das nochmal kurz erläutern würdest. Die Idee mit Arduino oder onboard-uC ist auch cool. Grüße Peter
Andreas B. schrieb: > Bei einem Eigenbau Projekt hat einer 3A bei 24V auf die Leitung gegeben. Gibts da wirklich keine technisch schönere Lösung als 72 Watt Rechtecksignal durchs Gemüsebeet zu blasen?!
Peter schrieb: > Hallo, > sehr interessantes Projekt, habe auch einen Worx-Mäher im Einsatz. Ich > kann den “Sendeteil” deines Schaltplans leider nicht gut entziffern, Darum ist auf Github das ganze Projekt auch als Sourcen drauf. Da kannst du dann reinzoomen soviel du willst. Aber hier im Forum soll es möglichst einfach zu öffnen sein, daher als Bild. Die C Sourcen sind aber noch nicht auf die Platinen angepasst. Die Platinen sind unterwegs, ich werde wahrscheinlich nächste Woche das ganze Testen, kommt noch etwas aufs Wetter an, regnen will auch der Rasenmäher nicht ;-) > sind J3 und J4 im Betrieb gebrückt? Ich habe hier zwei Möglichkeiten: Den FET mit 5V direkt vom Arduino zu speisen, dann schafft er laut Datenblatt ~10A. Dies ist aktuell mein Wunsch. Wenn dies nicht klappt, dann löte ich einen Optokoppler mehr drauf, und schalte ihn gegen eine höhere Spannung. (schon mit 6V schafft der FET 30A) Aber definitiv sagen kann ich dir das erst, wenn ich es getestet habe. Ich werde dann ggf. auch mit der Leistung und der Betriebsspannung noch etwas runter gehen. > D2 ist eine Freilaufdiode für die Schleifeninduktivität? Ja, wenn du die weg lässt, beginnt das Signal zu schwingen. Und zwar so heftig, das ich noch 1, 2 Pulse mit einer Spule am Osziloskop empfangen habe. > Die Idee mit Arduino oder onboard-uC ist auch cool. :-) Vka schrieb: > Andreas B. schrieb: >> Bei einem Eigenbau Projekt hat einer 3A bei 24V auf die Leitung gegeben. > > Gibts da wirklich keine technisch schönere Lösung als 72 Watt > Rechtecksignal durchs Gemüsebeet zu blasen?! Ich brauche nur 1W, das reicht. Möglicherweise auch weniger, muss ich noch messen. Ist hier aber nur ein kleiner Kreis. Das waren Informationen die ich beim googlen gefunden habe. Darum habe ich mir entsprechend Leistungswiderstände gekauft, die damit klar kommen. Jetzt weiss ich es besser. Die 4 Widerstände auf dem Board stören aber auch nicht, wer will kann 4*0.25W auflöten und braucht dann gar keine Leistungswiderstände mehr ;-) mfg Andreas
Schönes Projekt. Aber gibt es irgendeinen Grund, das ganze mit dem ziemlich überdimensionierten Mega zu machen? Wenn ich das richtig sehe, benutzt das Programm an sich lediglich fünf Pins. Dazu die ISP und die zwei Debug-Pins. Das müsste also z.B. auch mit einem Tiny44 funktionieren. Verzichtet man auf die Debug-Pins und die ISP ist auch ein Achtbeiner möglich. Zugegeben hat es aber Charme, einfach eine Arduinoplatine einlöten zu können. Gruß, Max
Andreas B. schrieb: > Aber wie man sieht: ziemlich rechteckig. 'rechteckig' will man ja eigentlich nicht. Kannst du mal bitte den Stromverlauf (via Shunt) posten? HF-technisch sollte der am aussagekräftigen sein, IMO.
Funky schrieb: > 'rechteckig' will man ja eigentlich nicht. Denke auch, dass der Empfänger im Mäher schmalbandig ist. Wie wäre es mit einem Reihenschwingkreis im Ausgang, mit so großem L, dass die Schleife selber nicht in’s Gewicht fällt? Besser für’s HF und müsste auch besser für die Energieeffizienz sein, oder hab ich da einen Denkfehler?
max schrieb: > Schönes Projekt. > > Aber gibt es irgendeinen Grund, das ganze mit dem ziemlich > überdimensionierten Mega zu machen? ATMEGA 328P-AU kostet bei reichelt: 2.58€ ATTINY 44-20 SSU: 2,49€ Wie lange arbeitest du für 0.09€? ;-) (Ja, du findest sicher ein Lieferant wo der Unterschied grösser ist) Zudem: Arduino IDE fallt weg, und es geht einfach mal schneller mit der. Ich habe weniger Speicher, unten links auf dem Board ist ein Eingang, ich dachte ich werde die Software noch so erweitern, das er aufzeichnen kann. Es gibt ja schliesslich diverse unterschiedliche Signale (Hersteller) zu messen... > Zugegeben hat es aber Charme, einfach eine Arduinoplatine einlöten zu > können. Damit geht die Entwicklung einfach schneller. Du hast aber recht, wenn man 1000ende produzieren möchte, würde ich das auch machen. Habe ich aber aktuell nicht vor. Funky schrieb: > Andreas B. schrieb: > >> Aber wie man sieht: ziemlich rechteckig. > > 'rechteckig' will man ja eigentlich nicht. > > Kannst du mal bitte den Stromverlauf (via Shunt) posten? Habe ich leider gerade keinen da. Werde nachher aber mal noch schauen, das ich mir welche bestelle. Peter schrieb: > Funky schrieb: >> 'rechteckig' will man ja eigentlich nicht. > > Denke auch, dass der Empfänger im Mäher schmalbandig ist. Wie wäre es > mit einem Reihenschwingkreis im Ausgang, mit so großem L, dass die > Schleife selber nicht in’s Gewicht fällt? Besser für’s HF und müsste > auch besser für die Energieeffizienz sein, oder hab ich da einen > Denkfehler? Wie bereits geschrieben, ich war auch etwas erstaunt. Ist aber offenbar so erlaubt, sonst hätte man weiter optimiert. HF ist überhaupt nicht mein Fachgebiet. Ein ähnlicher Rasenmäher wurde aber bereits zerlegt und gehackt. https://hackaday.io/project/6717-project-landlord Ich sehe die Empfängerschaltung so auf dem 1. Blick nicht, aber vielleicht seht ihr ja etwas? mfg Andreas
Angehängte Dateien:
-

IMG_3613.resized.JPG
210 KB
Hallo zusammen Das Board ist angekommen. Eine Beschriftung ist falsch, beim Power Connector habe ich + und - vertauscht, ärgerlich... Als nächstes noch kurz die Software anpassen. Da es regnet werde ich aber nicht testen können... Ich melde mich wider... mfg Andreas
Mal eine blöde Frage. Funktionieren diese Rasenmäher alle gleich? Brauchen die nur ein Magnetfeld oder ist die Frequenz auch wichtig?
F. F. schrieb: > Mal eine blöde Frage. Funktionieren diese Rasenmäher alle gleich? > Brauchen die nur ein Magnetfeld oder ist die Frequenz auch wichtig? Die Frequenz ist wichtig. Es gibt je nach Hersteller sogar verschiedene Varianten. Der Worx hat soweit ich weiss nur ein Signal. Husqvarna hat aber mehrere: - Das Begrenzungssignal, das nicht überschritten werden darf. - Ein Signal, dem er folgt, aber nicht mäht. Gedacht ist dies, um z.B. einen Weg zu überqueren, um so auf beiden Seiten zu mähe, aber nicht auf dem Weg. - Ein drittes Signal, um die Ladestation besser zu finden. Macht für mich irgendwie keinen Sinn, habe ich aber gelesen. Darum habe ich auch Taster angebracht. Somit ist es einfach das Signal umzuschalten, und der Nachbau wird für einen Laien einfacher. Schliesslich kann bei weitem nicht jeder programmieren, der einen Rasenmäher hat ;-) ps. Ein peinlicher Fehler habe ich noch auf dem Board: Ich habe die Vorwiderstände der RGB LED vergessen... mfg Andreas
Andreas B. schrieb: > Eine Beschriftung ist falsch, beim Power Connector habe ich + und - > vertauscht, ärgerlich... Bei '+' was wegkratzen & beim '-' mit feinem Edding nachhelfen. > Ich habe die Vorwiderstände der RGB LED vergessen... Gabs nicht mal LED mit eingebautem Vorwiderstand? Aber nur einfarbig, für RGB hat das noch keiner erfunden...
Angehängte Dateien:
-

Board.png
60 KB -

Board3d.png
170 KB -

Circuit.png
46 KB
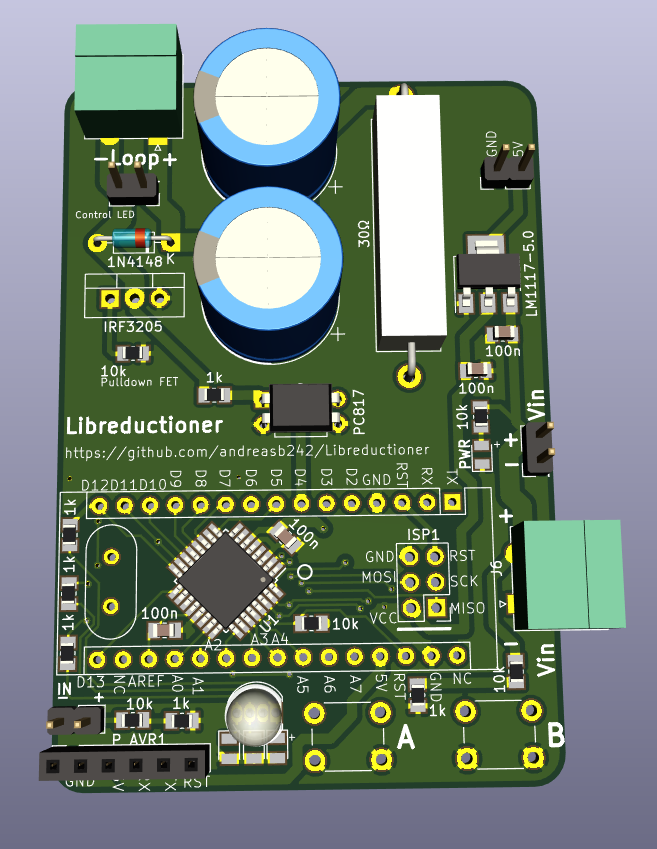
Hallo Zusammen Es läuft! Alle Fehler sind korrigiert. Den Schaltplan habe ich aufgeräumt, alles was nicht nötig war, ist gelöscht. (Ich hatte mehrere Varianten vorgesehen) Das Projekt ist komplett auf Github: https://github.com/andreasb242/Libreductioner Zu Archivierungszwecke hänge ich aber die Sourcen hier auch an. Die Software werde ich noch etwas verfeinern. Aktuell getestet habe ich mit 12V. Ich werde mal noch testen, wie viel das es wirklich braucht, und alles durch messen. Es sollte mit 7 - 12V laufen. Ich werde bei Gelegenheit noch versuchen, weitere Mäher zu implementieren. Werde mich dann nochmals melden... Bei Fragen einfach stellen. mfg Andreas
Angehängte Dateien:
-

boards.jpg
300 KB -

prototyp-board.jpg
230 KB -

prototyp.jpg
190 KB
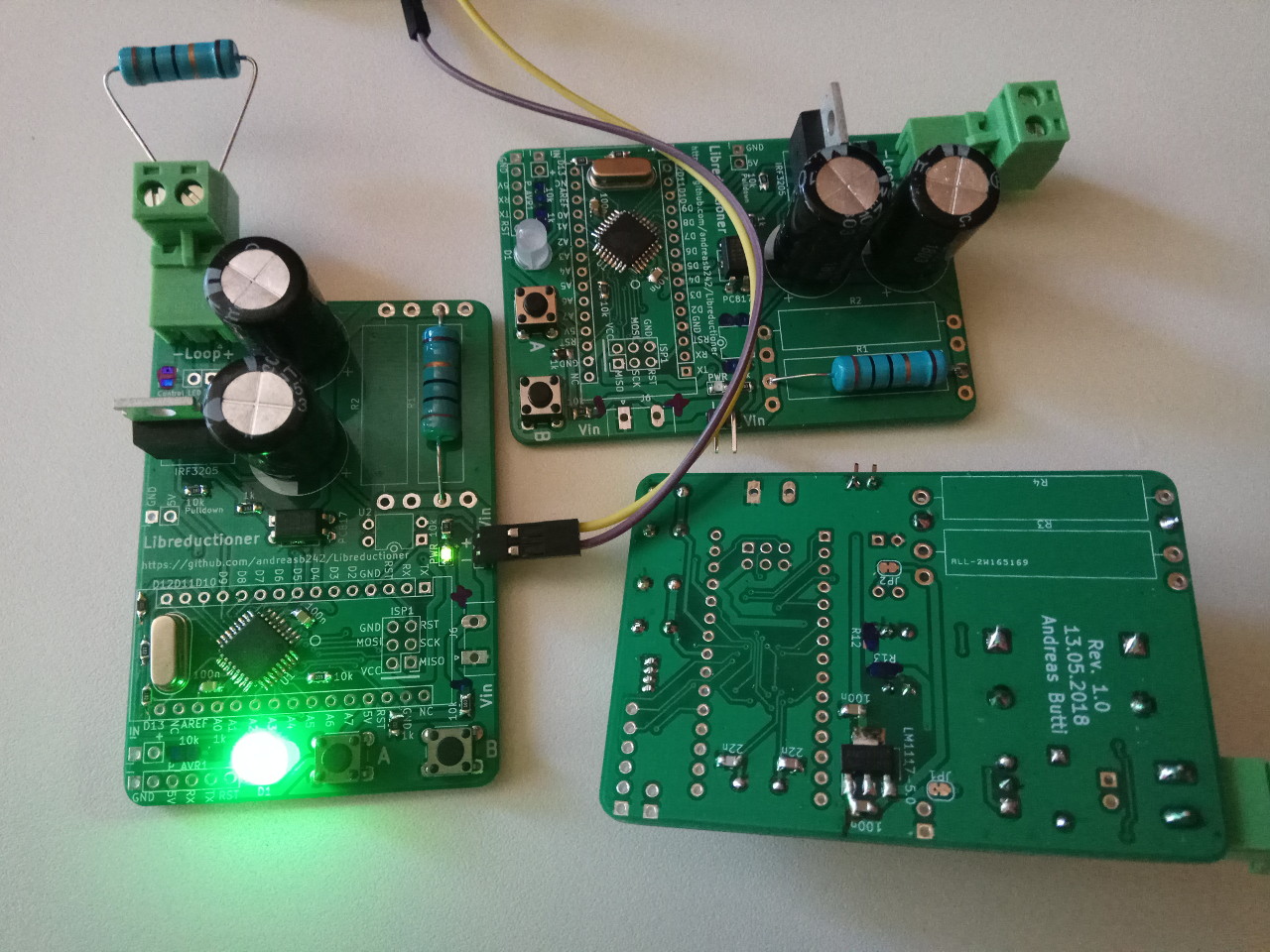
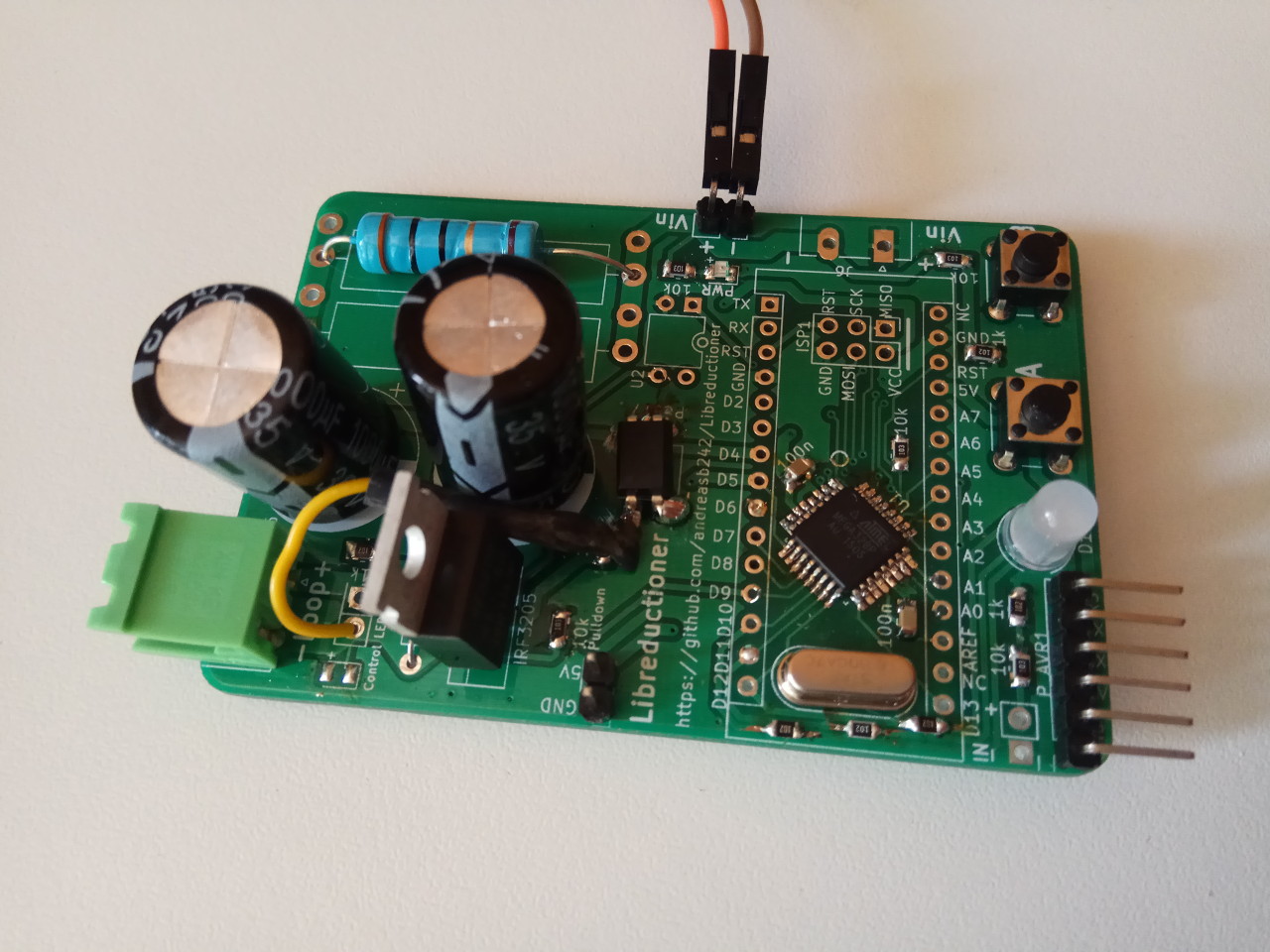
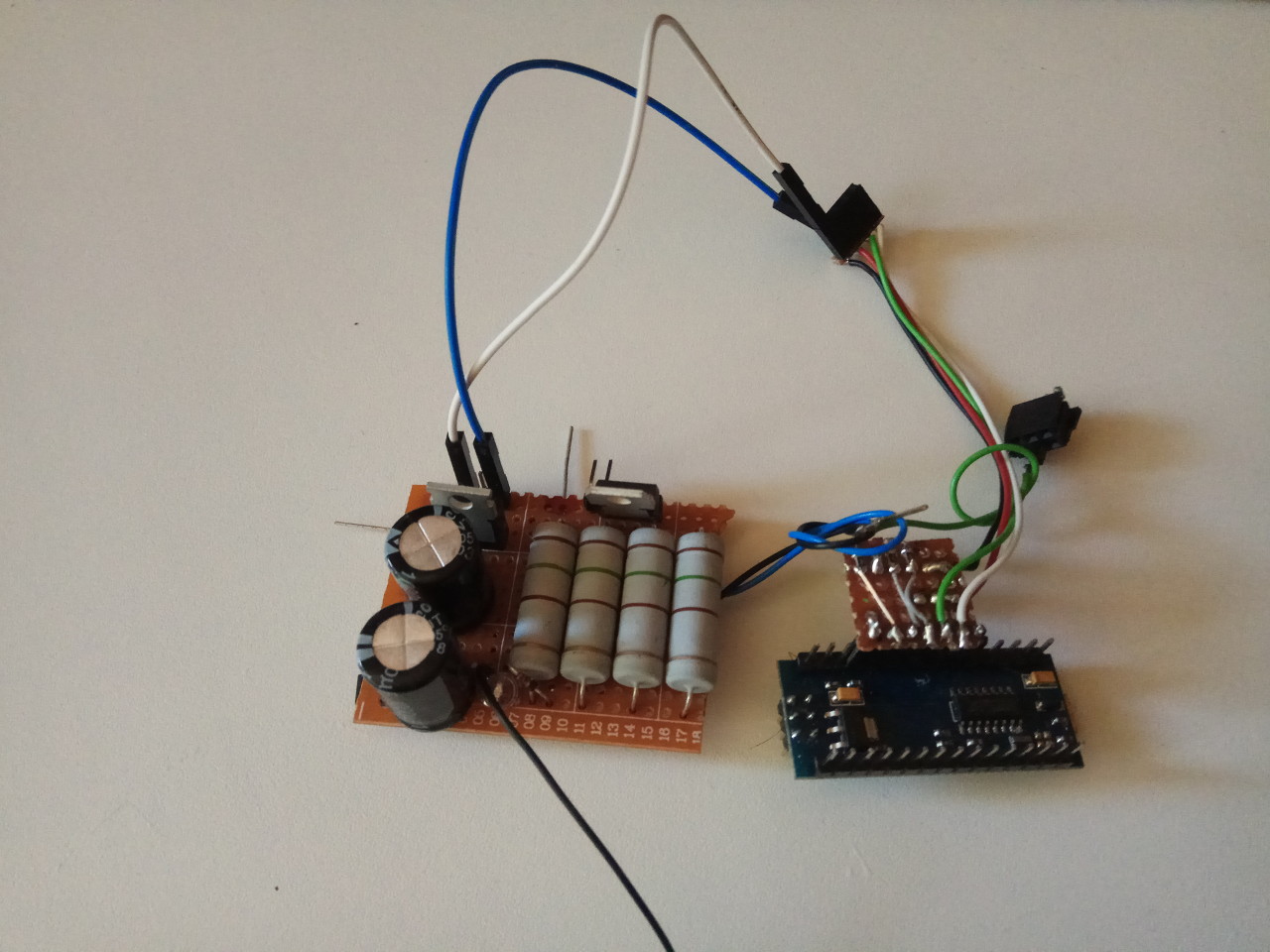
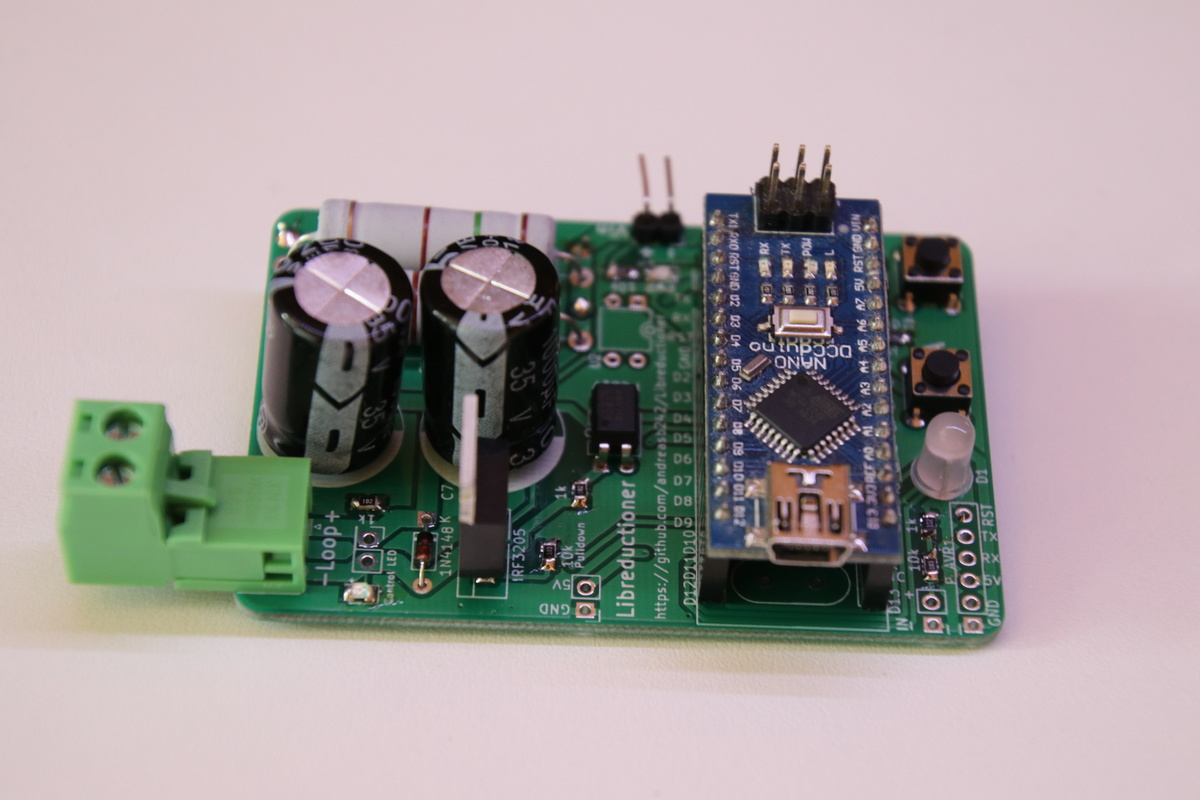
Kleine Nachlieferung: 1. board.jpg: 3 aufgebaute und funktionierende Boards. Testen lassen sich diese mit einem 30Ω widerstand, oder mit einer Induktion. Ich habe jetzt eine 22mH Spule verwendet. Dies ist ähnlich viel, wie die Schleife in echt hat. Ich habe keine genauen Induktionsmessgeräte. 2. prototyp-board.jpg: Meine erste voll gelötete Platine. Optokoppler habe ich aus versehen geschrottet. Ebenso den AVR. 19V am Input ergibt 9V am AVR... Und ist halt ein Prototyp, der muss so aussehen! ;-) 3. prototyp.jpg: Mein erster Prototyp auf Lochraster. Ich finde der sieht nicht so professionell aus, hat aber funktioniert ;-) mfg Andreas
Hallo, tolles Projekt. Ich habe mir im August auch so einen Robbi zugelegt (Landroid M800I) und habe ebenfalls das Problem, dass ich im Garten eine isolierte Insel habe und die Loop dort nicht hinbekomme. Ich würde das gerne nachbauen mit einem popeligen ATmega8. Dazu habe ich zwei Fragen: 1) Welche Frequenz verwendest Du ? 2) Was ist die Pulsbreite des Signals ? Ich könnte zwar mein Oszi in den Garten stellen, bin aber zu faul dazu :-) mfg Manni
Manfred L. schrieb: > Hallo, > > tolles Projekt. Ich habe mir im August auch so einen Robbi zugelegt > (Landroid M800I) und habe ebenfalls das Problem, dass ich im Garten eine > isolierte Insel habe und die Loop dort nicht hinbekomme. > > Ich würde das gerne nachbauen mit einem popeligen ATmega8. Dazu habe ich > zwei Fragen: Die Software ist oben angehängt, die kannst du auch auf dem ATMega8 laufen lassen. z.B. https://github.com/MCUdude/MiniCore Ansonsten ist der ATMega168 bzw. 328 ja Pinkompatibel. > > 1) Welche Frequenz verwendest Du ? Ist in den Sourcen sogar kommentiert: 78Hz > 2) Was ist die Pulsbreite des Signals ? 138µs > > Ich könnte zwar mein Oszi in den Garten stellen, bin aber zu faul dazu > :-) Kann ich verstehen, immerhin hat meins einen Akku ;-) > > mfg Manni Sorry, hab zwar ein Mail gekriegt, aber aufgrund zu viel aufgeklappten Ordner im Mailprogramm ist das Mail ausserhalb des sichtbaren bereiches gelandet, darum die etwas verspätete Antwort. mfg Andreas
Hallo, ich interessiere mich sehr für ihr Projekt. Da ich auch einen 2. Garten habe, soll mein Landroid dort auch was zu tun bekommen. Ich habe es nicht so mit der Elektronik, daher meine Frage: kann ich von Ihnen eine Platine und einen programmierten ATMEGA dafür käuflich erwerben. Vielen Dank Viele Grüße Th. Hüller
Thomas Hüller schrieb: > Hallo, > > ich interessiere mich sehr für ihr Projekt. Da ich auch einen 2. Garten > habe, soll mein Landroid dort auch was zu tun bekommen. Ich habe es > nicht so mit der Elektronik, daher meine Frage: kann ich von Ihnen eine > Platine und einen programmierten ATMEGA dafür käuflich erwerben. > > Vielen Dank > > Viele Grüße > Th. Hüller Das würde ich auch gern fragen, so als Frau ;-) Habe auch Interesse für meinen Worx und seine Nebenschauplätze.
Hallo Andreas Ich will auch gern eine Platine und einen programmierten ATMEGA käufen
Hallo Andreas, vielen Dank für die Erstellung des Projekts. Ich habe mir die Platine bestellt und werde hoffentlich die Schaltung erfolgreich in Betrieb nehmen. @all: Ich habe 10 Platinen bestellt. Wer gerne eine haben möchte, bitte melden. Viele Grüsse Andi
Vollbracht:-) die Platienen sind da und ich habe eine Aufgebaut! Funktioniert spitze! Danke Andreas
Andi schrieb: > Vollbracht:-) die Platienen sind da und ich habe eine Aufgebaut! > Funktioniert spitze! > > Danke Andreas Super, ich muss jetzt gerade ehrlich zugeben, ich habe den Thread länger nicht mehr besucht :-o Aber es freut mich natürlich, wenn er dir geholfen hat. mfg Andreas
Weisst Du ob diese Platiene auch mit einem MC Mulloch ROB s400 funktioniert?
Andi schrieb: > Vollbracht:-) die Platienen sind da und ich habe eine Aufgebaut! > Funktioniert spitze! > > Danke Andreas Hi Andreas, hab gerade deinen Beitrag gelesen. Hast du noch eine Platine? Grüße Jan
Hallo zusammen, ich habe mir die Platinen bestellt und bin aktuell noch auf der Suche nach den Bauteilen. Die SMD-Komponenten sind kein Thema, aber bei reichelt finde ich z.B. den Optokoppler PC817 nicht, dafür aber einen Vergleichstypen "EL817". Geht der auch? Weiterhin suche ich noch den 30 Ohm Lastwiderstand. Mit 17W gib es nur einen mit 33 Ohm, bei 30 Ohm hätte er nur 2 Watt Leistung oder ich habe ihn einfach übersehen. Ebenfalls die Anschlussklemmen für den Draht - das sieht für mich nach 5mm Rastermaß aus. Wäre es dann "AKL 094-02" oder "CTB 0102-2"? Vielleicht kann mir hier jemand weiterhelfen? Vielen Dank schon mal vorab!
Hallo Andreas, bei der Suche nach Ersatz für den Schleifensignalgeber für meinen Worx bin ich auf Dein Projekt gestoßen. Allerdings bin ich mit der Elektronik nicht so vertraut und suche eine fertige Platine. Hast du evtl. noch eine fertige Platine zu verkaufen? Vielen Dank im Vorraus
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.