Hallo Zusammen! wie funktioniert das mit den Encoder an einem DC-Motor, habe das Problem das an dem Bürstenmotor von meinem Staubsauger Roboter ein Encoder drauf ist und vermutlich defekt wie kann ich das überprüfen?
Nun, er muss beim Drehen Impulse abgeben, wenn mechanisch kann man einfach auf Durchgang messen, wenn hallsensorbasiert müssen die Hallsensoren eine Versorgungsspannung bekommen, wenn photoelektrisch müssen die LEDs und Phototransistoren mit Strom versorgt werden.
Auf dem Buerstenmotor? Eher nicht. Da ist die genaune Position unwichtig. kbvzxcjc
kbvzxcjc schrieb: > Auf dem Buerstenmotor? Eher nicht. Da ist die genaune Position > unwichtig. > > kbvzxcjc Aber vielleicht die Drehzahl.
kbvzxcjc schrieb: > Auf dem Buerstenmotor? Eher nicht. Da ist die genaune Position > unwichtig. Ach.... Viele Servos sind Bürstenmotoren mit irgendeiner Form von Drehwinkel Sensor. So viele, dass ich behaupte, die Hersteller haben einen Markt für ihre Ware gefunden.
Nja und wie erkenn ich ob es ein mechanischer, hallsensor oda photoelektrischer encoder ist?
Lukas schrieb: > Nja und wie erkenn ich ob es ein mechanischer, hallsensor oda > photoelektrischer encoder ist? Und wie meinst du sollen wir das von hier sehen ? Glaskugel und so ? Du bist der einzige, der das Teil und seine Anschlüsse sehen kann.
Michael B. schrieb: > Und wie meinst du sollen wir das von hier sehen ? > > Glaskugel und so ? Und ausserdem, welcher Motor? Der der saugt, oder der den Roboter bewegt? Eine Bezeichnung wäre nicht schlecht, und/oder ein ausreichend scharfes Foto. Georg
georg schrieb: > Und ausserdem, welcher Motor? Der der saugt, oder der den Roboter > bewegt? Daraus Lukas schrieb: > dem Bürstenmotor hatte ich geschlussfolgert: der der die Buersten antreibt. kbvzxcjc
oder aber Bürstenmotor als Gegensatz zu bürstenlosem Motor. Also klassischer permanenterregter DC-Motor oder BLCD. Bei den Radantrieben dient der Encoder (oder auch nur 1 Kanal Impuls) zur Wegmessung. Da optische Sensoren an den Rädern wegen Verschmutzung ungeeignte sind, sind hier Hall-Sensoren direkt an der Motorwelle von Vorteil.
kbvzxcjc schrieb: > hatte ich geschlussfolgert: der der die Buersten antreibt Vielleicht treibt die Bürsten ja ein bürstenloser Motor an... Rätsel über Rätsel. Georg
Angehängte Dateien:
-

20180517_113656_HDR.jpg
210 KB
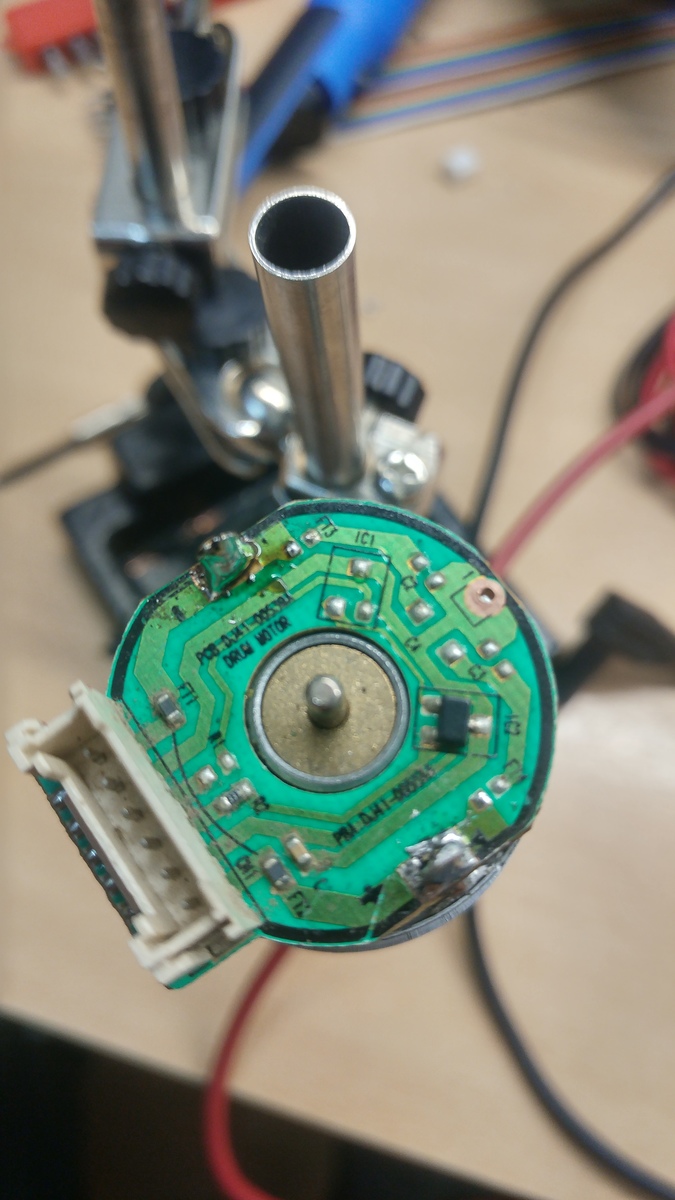
Habe hier ein Bild vom Encoder, könnt ihr mir jetzt weiter helfen, wie ich den richtig überprüfe?
der untere (1) und obere (6) Pin geht zum Motor (oben -, unten + , das dürfte aber nur für eine Vorzugedrehrichtung gelten). Die üblichen Verdächtigen bei den Hall-Sensoren von Micronas, Honeywell oder Allegro haben die Anschlussbelegung + - Signal. Daher ist vermutlich der 2. Pin von unten die Versorgung des Hall-Sensors (erstmal mit 5V probieren), der 3. Pin ist das Ausgangssignal (der Serienwiderstand ist etwas ungewöhnlich, da der Ausgang Open-Collector ist), der 4. Pin wäre für den unbestückten Sensor (liefert dann ein um 90° phasenversetztes Signal) und Pin 5 ist Masse für den Sensor. Also an 2 und 5 Spannung anlegen, an 3 einen Pull-Up Widerstand gegen 5V und beim Drehen des Motors muss ein Signal messbar sein.
Bernhard S. schrieb: > der untere (1) und obere (6) Pin geht zum Motor Die mit FT1/FT2(?) gekennzeichneten könnten Sicherungen sein. Warum zwei? Für Kerkos zu dunkel und wegen dem /Angst-Widerstand/: Bernhard S. schrieb: > (der Serienwiderstand ist etwas ungewöhnlich, da der > Ausgang Open-Collector ist) ?
Lukas schrieb: > oke und wo bei welchen pins muss ein Signal messbar sein? Bernhard S. schrieb: > 3. Pin ist das Ausgangssignal
Lukas schrieb: > Habe hier ein Bild vom Encoder Offenkundig ein Hallsensor und zwar nur einer, nicht zwei wie für Erkennung der Drehrichtung nötig wäre. Also Versorgungsspanung anlegen und gucken ob beim Drehen ein Impuls am Ausgang erscheint. Welche Pins Versorgung und Puls sind ? Motor - Versorgung - unbenutz Taktausgang (ggf 4k7 pull up nach 5V nötig) Versorgung + Motor +
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.