Sagen wir mal, ich möchte mit einem Motor etwas Millimetergenau wohin bewegen. (Normaler kleiner DC Motor, 5V, 2A) Wenn ich da jetzt einen normalen Motor einbaue, wird das wahrscheinlich nicht möglich sein. Ist das nur mit einem Steppermotor möglich? Oder kann ich bei einem normalen Motor eine Bremse einbauen um ihn millimetergenau anzuhalten?
Klar geht das, mit den passenden Sensoren, Bremse und einer Steuerung.
Da brauchts nicht mal eine Bremse. Drehgeber (Encoder) auf die Motorwelle, passenden DC-servotreiber davor: fertig. Es gibt einige Projekte im Internet die genau das tun (DC-Servotreiber). Steuert sich dann je nach projekt über Weg/Geschwindigkeitsvorgabe via I2c oder über Step/Dir inputs wie ein Schrittmotortreiber.
welches Gewicht möchtest du wohin bewegen, und in welche Richtung? für kleine lineare "Transporte" eignet sich z.B. die Mechanik ein altes Floppy-Laufwerks, welches den Kopf über eine (Schnecken-Stange?) genau (besser als Millimeter-genau) positionieren kann. wobei "Normaler kleiner DC Motor, 5V, 2A" sich nach größeren Kräften und größere bewegte Massen anhört. Vielleicht dann ein 8 Zoll Laufwerk schlachten ;-) http://spurtikus.de/2016/03/30/qumetrak-842-8-zoll-floppy-laufwerk-1982/
Um dazu etwas Vernünftiges zu sagen, sind deine Angaben zu mager. Wirklich höchst präzise Positionierungen macht man z.B. mit Piezo-Aktuatoren (Mikroskopie) oder Ultraschall-Motoren (z.B. in Foto-Objektiven). Ansonsten hilft da eher ein Getriebe mit möglichst großer Untersetzung und Impulsgeber am Eingang ... Bei Schrittmotoren kann man auf den Geber verzichen und einfach die Impulse entsprechend ausgeben. Nicht zu unterschätzen ist auch das Spiel eines Getriebes. Wenn es wirklich genau sein soll, nähert man sich der Soll-Position immer von der gleichen Seite, notfalls nach vorherigem "Überfahren". So erreiche ich z.B. bei einem Laserpointer zur Beleuchtung eines Museums-Exponates mittels Modellbauservo auf einer Entfernung von 3m eine Wiederholgenauigkeit um 1cm.
Langsam fahren und Kurzschlussbremse. Wenn dir das zu brutal ist: LokPilot XL von ESU, die sind zwar sehr teuer, aber können eineLok mit schlechtem DC-Motor und Getriebe über mehrere Meter hinweg (auf dem Modellbahngleis) auf den Millimeter genau abbremsen (nach einer sehr aufwändigen Kalibrierung). Ohne Sensoren. Und das aus verschiedenen Geschwindigkeiten und mit verschiedener Last. Der Klang der Motorregelung lässt darauf schließen, dass er die Motorpole zählt... Klingt jetzt sehr nach Werbung für ESU, ich weiß nicht, ob andere Dekoderhersteller das genauso gut können.
Wie sieht denn die Mechanik aus? Wieviel Weg macht der Motor pro Umdrehung? Roman K. schrieb: > Wenn ich da jetzt einen normalen Motor einbaue, wird das wahrscheinlich > nicht möglich sein. Wenn du einen Positionsgeber an ihn anschließt schon...
Michael B. schrieb: > Drehgeber (Encoder) auf die Motorwelle, passenden DC-servotreiber davor: > fertig. Nur den zurückgelegten Weg der Räder zu erfassen, funktioniert nur auf Schienen befriedigend. Bei frei lenkbaren Fahrzeugen, entsteht immer ein nicht wirklich zu kalkulierender Schlupf. Nach ein paar Kurven, kann selbst bei kürzeren Strecken, die Abweichung bereits etliche Zentimeter betragen. Wurde schon ein Sensor einer Lasermaus erwähnt?
Deine Beschreibung ist zu unbestimmt. Wenn Platz keine Rolle spielt, würde ich auch mal an den Antrieb eines Kompensationsschreibers denken. Z.B. so etwas: https://www.ebay.de/itm/Kompensationsschreiber-von-Metrawat/332654616121 P.S.: Woher kommt überhaupt die Sollposition?
ich hatte mit einem NIBObee Roboter die Erfahrung gemacht, dass ich die Antriebsmotoren mit einer Abweichung von etwas weniger als 1 Umdrehung anhalten kann. Ein gut abgestimmter PI Regler ist dabei hilfreich.
Wie schon andere erwähnten: Zu wenig Info. Grundsätzlich kann man aber sagen - wenn du eine unabhängige Messgröße, also z.B. einen ausreichend genauen Entfernungsmesser hast, dann kann man etwas tricksen, sonst gehts wenn überhaupt, nur mit Schrittmotor (außer das ganze darf sich nur richtig langsam bewegen). Von der Umgebung abgeschottete Systeme wie Drehgeber ermöglichen eher keine milimetergenaue Aktionen.
Angehängte Dateien:
-

SM_Schlittenantrieb.jpg
66 KB
Alex G. schrieb: > sonst gehts wenn überhaupt, nur mit Schrittmotor Naja, der Schrittmotor muß auch die passende Kraft haben. Sonst fehlen Schritte.
Lothar M. schrieb: > Wenn du einen Positionsgeber an ihn anschließt schon... Das ist antürlich die erste Voraussetzung. Dazu muss es aber der Motor auch zulassen, in der Drehzahl geregelt zu werden, damit man ihn langsam an die Zielposition annähern kann. Mit Drehstrom-Asynchronmotoren wie an einer Bohrmaschine ist das hoffnungslos (die drehen mit z.B. 2700 U/min oder garnicht), aber mit DC-Servomotoren positionieren Werkzeugmaschinen nicht auf einen mm, sondern auf 1 µ genau. Und das mit hohen Leistungen, im Gegensatz zu einem Schrittmotor. Der Motor sollte also bis fast zum Stillstand heruntergeregelt werden können, und die Annäherung an die Zielposion erfolgt mit abnehmender Geschwindigkeit, so dass bei der Sollposition gerade die Geschwindigkeit Null wird. Georg
Alex G. schrieb: > Von der Umgebung abgeschottete Systeme wie Drehgeber ermöglichen eher > keine milimetergenaue Aktionen Im Allgemeinen sind Drehgeber aber doch keine von der Umgebung abgeschotteten Systeme; jedenfalls dort wo sie üblicherweise Verwendung finden. Außerdem läßt sich mit einem Schrittmotor alleine sicher keine höhere Genauigkeit erzielen als mit einem hinreichend fein auflösenden Drehgeber.
georg schrieb: > Dazu muss es aber der Motor > auch zulassen, in der Drehzahl geregelt zu werden, ... Strenggenommen gilt das aber nicht für den Motor alleine, sondern für das Antriebssystem als ganzes; schließlich ist zumindest im OP auch eine Bremse als eigene Komponenete erwähnt.
wir wissen immer noch nicht ob es sich um einen Sekundenzeiger einer kleinen Uhr oder um ein Schiffshebewerk handelt. Beides kann man mit einem (oder mehreren) Stepper machen, muss es aber nicht.
Wir könnten den TO bis zur weiteren Klärung vorläufig wort-wörtlich
nehmen:
> ich möchte mit einem Motor etwas Millimetergenau wohin bewegen.
Antwort: Du könntest den Motor mit der Hand zum Ziel tragen und mit
einem Lineal die Millimeter abmessen, um ihn genau an der richtigen
Stelle abzulegen.
Dies soll als Anreiz dienen, die Frage besser zu formulieren bzw. die
fehlenden Infos nachzureichen.
Cool, ne Drehstrombohrmaschine. Was die Leute alles haben. Drehstrommotoren kann man übrigens prima positionieren. Nennt sich dann meist Servo ;-)
Ryven schrieb: > Cool, ne Drehstrombohrmaschine. Was die Leute alles haben Ständerbohrmaschinen mit Drehstrommotor stehen zu Tausenden herum. Ist wohl jenseits des Tellerrandes. Georg
Ich wollte das Ding als ein Hobbyprojekt mit einem RPI aufrüsten :-) Da müsste man halt den RPI zum Steuern des einfachen DC Motors verwenden. https://www.amazon.de/dp/B015ODTMME/ref=asc_df_B01HHY56VE52579225/?tag=googshopde-21&creative=22398&creativeASIN=B01HHY56VE&linkCode=df0&hvadid=256078823166&hvpos=1o5&hvnetw=g&hvrand=5366957272895844625&hvpone=&hvptwo=&hvqmt=&hvdev=c&hvdvcmdl=&hvlocint=&hvlocphy=1000900&hvtargid=pla-367801489435&th=1
Du kannst einen Motor sogar noch genauer positionieren. Ist eigentlich nur eine Frage des Willens und natürlich des Geldes. Frag‘ mal den Herren CNC. Kennst Du jeden 1/100-tel Millimeter persönlich, so kannst Du da auch parken. Allerdings sind hierfür auch die nötigen Positionsgeber, eine spielarme Mechanik und eine sauber funktionierende Regelung vonnöten.
Roman K. schrieb: > Da müsste man halt den RPI zum Steuern des einfachen DC Motors > verwenden. Wenn man das müsste, dann könntest du ja....
Joe G. schrieb: > Roman K. schrieb: >> Da müsste man halt den RPI zum Steuern des einfachen DC Motors >> verwenden. > > Wenn man das müsste, dann könntest du ja.... Man hat mich ja vorgewarnt.
Roman K. schrieb: > Joe G. schrieb: >> Roman K. schrieb: >>> Da müsste man halt den RPI zum Steuern des einfachen DC Motors >>> verwenden. >> >> Wenn man das müsste, dann könntest du ja.... > > Man hat mich ja vorgewarnt. Was ist denn nun genau deine Frage? Du willst den Vileda-Roboter aufpimpen? Ok. dann tu es. Warum muss der Milimetergenau fahren? Was genau willst du da für eine Funktionalität einbauen? Positionierung von Robotern ist ne komplexe Sache. Da gibts ganze Bücher drüber. Traditionell haben solche Roboter Radencoder und eine nach oben gerichtete Kamera um ihre Bewegungen zu erfassen. Abgleich mit bekannten Kartenpunkten kann dann auch noch erfolgen. Willst/Kannst du sowas entwicklen? Ich denke nein!. Dann mach was alle angehenden Roboterbastler erst mal tun: Lass das Ding zufällig rumfahren und evt. Hindernissen ausweichen. Ganz ehrlich: Mal schnell nen autonomen Robbi bauen der sich mal eben so im Raum orientieren kann ist nicht drinn.
Cyblord -. schrieb: > Roman K. schrieb: >> Joe G. schrieb: >>> Roman K. schrieb: >>>> Da müsste man halt den RPI zum Steuern des einfachen DC Motors >>>> verwenden. >>> >>> Wenn man das müsste, dann könntest du ja.... >> >> Man hat mich ja vorgewarnt. > > Was ist denn nun genau deine Frage? Du willst den Vileda-Roboter > aufpimpen? Ok. dann tu es. > Achso ja dann tue ich es einfach.
Angehängte Dateien:
-

RL01_Motor__sm.jpg
130 KB -

RL01_Motor_Controller_sm.jpg
250 KB
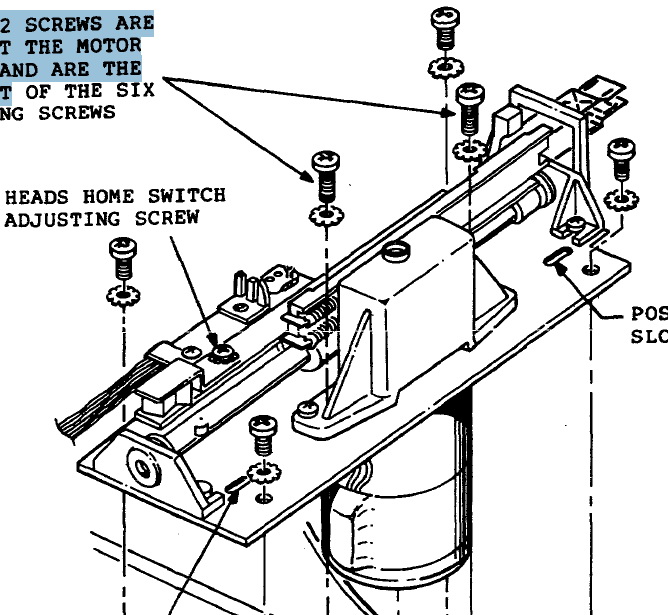
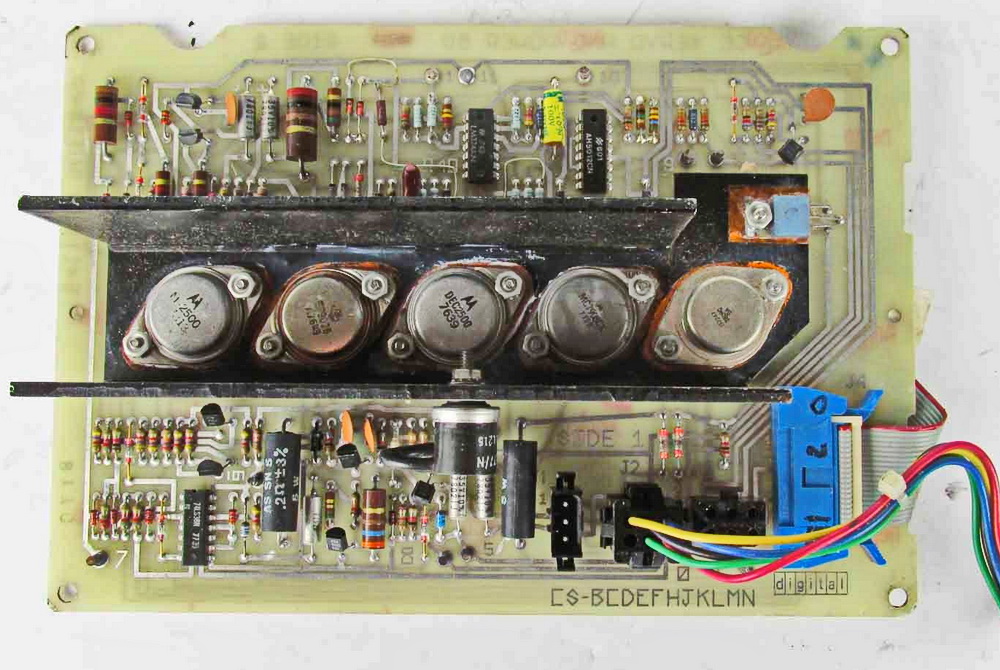
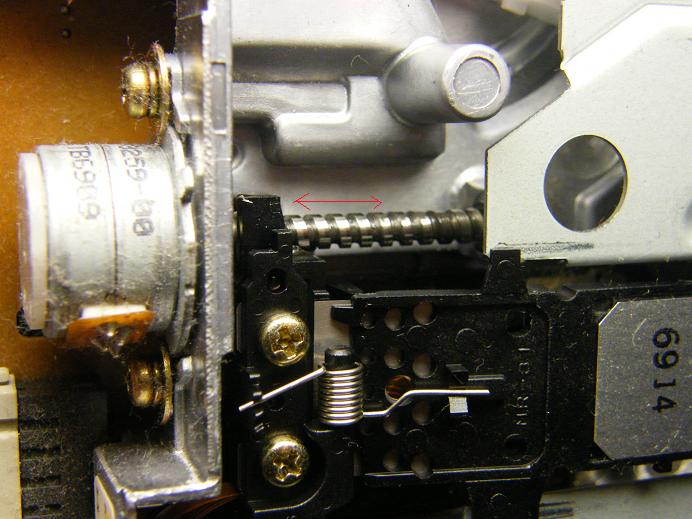
Man unterschaetzt was mit primitiver Hardware moeglich ist Ein Beispiel aus den 80er Jahren... Wechsel-Plattenlaufwerk RL02 Ein Platter mit 14 Zoll, 10 Megabyte ! 512 Spuren auf 2 Zoll - also ca 0,01 mm Spurbreite Genaue Positionierung war vermutlich < 0,002mm ! Positionierung mit einem primitiven DC Motor, ganz normal mit Kohlebuersten Uebertragung auf den linearen Kopfschlitten mit 2 Schreib/Lese Koepfen mit einem "Skalentrieb" aus einem Kunststoffaden, der auf der Achse des DC Motors abgewickelt wird Positionierungszeit fuer Spurwechsel 55 msec Die Platte rotiert mit 3600 Rpm Auch das eventuelle "eiern" der Platte wurde dynamisch nachgeregelt - von einem stinknormalen DC Motor mit Kohlebuersten Feedback der Position von den Schreib/Lesekoepfen & einem magnetischen Tacho Ich denke das war reine TTL & Analogtechnik ohne uP Hat eigentlich sehr gut jahrelang in tausenden Exemplaren funktioniert...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.