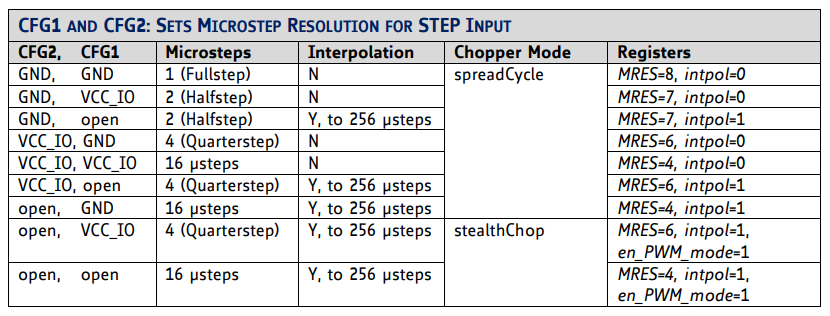
Hi, Ich verbaue gerade auf einem PCB einen TMC2130 Schrittmotortreiber und die Einstellungsmöglichkeiten sind sehr groß im Gegensatz zu einem normalen Schrittmotortreiber. https://www.trinamic.com/fileadmin/assets/Products/ICs_Documents/TMC2130_datasheet_Rev1.10.pdf Mir sind da ein paar Fragen gekommen, die vielleicht Jemand beantworten kann: Ich möchte den Treiber im Standalone Mode mit dem DIR/STEP Interface verwenden und auf SPI verzichten. Nun ist auf Seite 6 eine Beispielschaltung gegeben, wobei jedoch der SPI_MODE Pin floating ist. Auf Seite 85 hingegen heisst es: "To activate standalone mode, tie pin SPI_MODE to GND". Ein Schreibfehler? Weiter sind auf Seite 86 die Pinconfigurationen für den Mikroschrittbetrieb abgebildet. Verstehe ich das richtig, dass der Chopper Mode (spreadCycle, stealthChop) auch gleich damit eingestellt werden? Weiter kann man ja nur bis 16 uStepps/Step Auflösung einstellen, wobei aber von 256uStepps gesprochen wird. Wie genau ist das mit der Interpolation gemeint? Stellt der Controller die Schrittauflösung gemäß Drehmoment ein? Grüsse Bert
Angehängte Dateien:
-

CFG.png
73 KB
Bert S. schrieb: > Nun ist auf Seite 6 eine Beispielschaltung gegeben, wobei jedoch der > SPI_MODE Pin floating ist. Auf Seite 85 hingegen heisst es: "To activate > standalone mode, tie pin SPI_MODE to GND". Ein Schreibfehler? Der hat einen internen Pull-Down. Das steht übrigens genauso im Datenblatt wie die Sache mit der Interpolation.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.