Hallo, ich habe einen Roboterarm mit mehreren Segmenten der am Ende eines jeden Segments einen Servomotor mit einer C-förmigen Schelle besitzt. Diese Verbindungsschellen eines jeden Segments sind miteinander verbunden um einen mehrgelenkigen Arm zu bilden. Ich möchte den Winkel einer jeden Schelle absolut messen können, um die Orientierung des Arms im Anschaltzustand bestimmen zu können, sowie meine durch Steuerung der Servomotoren gestellten Winkel überprüfen. Mein Bauraum ist begrenzt (etwa 20 x 20mm als Grundfläche), ich kann keine Sachen in der Achse anbringen. Meine erste Idee: Zahnrad außen an der C-Schelle befestigen, weiteres Zahnrad an einem Potentiometer und damit den Winkel bestimmen. Problem: Ich finde kein flaches, qualitatives Potentiometer an dem ich ein Zahnrad befestigen kann. Habt ihr da etwas? (sowas in der Richtung: http://www.segor.de/#Q=SRP5klin%252F16mm&M=1 , aber mit eigenem Zahnrad welches ich kaufen kann) Irgendwie lässt sich da aber bestimmt etwas zusammenfrickeln. Daher meine Frage: Gibt es andere Ideen / Möglichkeiten? Mit freundlichen Grüßen
Du willst also die spielarme interne Servo-Regelung mit einer externen Schlabber-Mechanik überprüfen? Besorge dir Digitalservos, da kann man auch einige Parameter (Endstellungen, Null-Position) programmieren. Das von dir gezeigte Poti hat kein Zahnrad, sondern ein Einstellrad für die Handbedienung. Da bekommst du kein passendes Gegenstück, weil das keine Zahnrad-Zähne sind.
Ja das mit dem gezeigten Poti ist mir klar, ich suche halt etwas ähnlich flaches mit der Möglichkeit ein eigenes Zahnrad zu befestigen. Mir geht es nicht um Genauigkeit, es geht mir darum, um in ungesteuerten Zustand eine grobe Orientierung des Arms bestimmen zu können, um einen Anfangswert für meine kinematische Kette zu bekommen. Dazu reicht mir eine Winkelmessung von +- 3-5° völlig aus. Digitalservos mit Messausgang sind natürlich die Beste, aber keine für mich relevante Option. Gruß
Dustin L. schrieb: > +- 3-5° völlig Dann ist dein verketter Fehler am Ende des Arms aber geschätzt 30% oder mehr.
Damit könnte ich leben. Es geht nur darum, beim Einschalten der Servomotoren einen Wert vorzugeben der in der Nähe der tatsächlichen Orientierung liegt, damit im Einschaltvorgang nicht von -90 auf +90 Grad gesprungen wird(Beispiel) und die Kräfte am Arm zu groß werden.
Schau Dir mal Seite 14 an. Da ist eine interessante Möglichkeit für die Lösung eines solchen Problems beschrieben: http://www.hpl.hp.com/hpjournal/pdfs/IssuePDFs/1993-06.pdf
Such doch mal nach Drehgebern bzw. Encoder. Gibts da nix für dich?
andere fluxe Idee: Du könntest deine Servos ein mal kalibrieren und die Endposition vor dem Abschalten in einem EEPROM speichern.
Dustin L. schrieb: > Habt ihr da etwas? (sowas in der Richtung: 1. Das Zahnrad ist ja schon fast so gross wie dein maximaler Platz, wie willst du da ein zweites Zahnrad unterbringen? 2. Trimmpotentiometer sind nicht für viele Umdrehungen ausgelegt, das wird nach kurzer Zeit ausfallen. Potentiometer mit langer Lebensdauer sind zu gross, Encoder und Synchro Resolver auch. Gesamtes Konzept ändern.
Es gibt doch solche Magnetsensoren, die die Winkellage eines Magneten auf einer Welle bestimmen. Beispiel: https://www.digikey.de/product-detail/de/infineon-technologies/TLV493DA1B6HTSA2/TLV493DA1B6HTSA2CT-ND/5891933 Das baut schön klein, ist verschleissfrei und hat kein Umkehrspiel. Über die absolute Genauigkeit kann ich nichts sagen, aber sowas wird auch in professionellen Winkelgebern eingebaut. Letztens ist mir ein Stufenschalter mit 21 Stufen untergekommen. Der hatte garkeinen mechanischen Schalter, sondern ein solches IC und einen kleinen Prozessor.
Angehängte Dateien:
-

test.png
1,6 MB
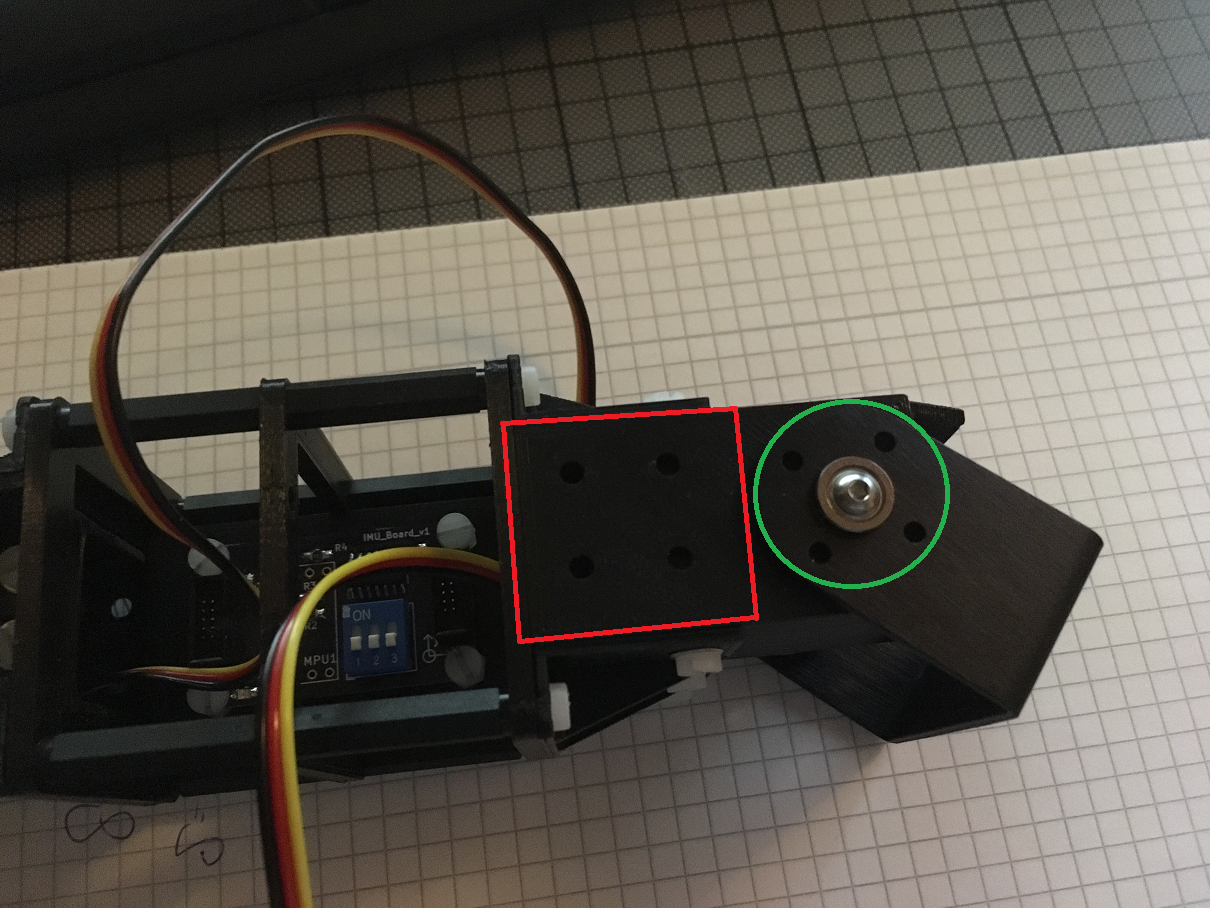
Hallo, danke für die vielen konstruktiven Beiträge. Andre R. schrieb: > andere fluxe Idee: Du könntest deine Servos ein mal kalibrieren und die > Endposition vor dem Abschalten in einem EEPROM speichern. Geht leider nicht, da der Arm auch im ausgeschalteten Zustand bewegt werden kann. Ich habe mal ein Bild angehängt um es ein bisschen klarer zu machen. Rot markiert der Bereich in dem ich Platz habe weitere Dinge anzubauen. in Grün der sich drehende Teil der Schelle. Hier kann ich ein Zahnrad montieren. Würde ein normales Potentiometer eine dauernde Drehung aushalten? Vom Verfahrweg muss die Übersetzung halt dementsprechend ausgelegt werden. Absolut Encoder, magnetische Encoder etc. hab ich mir angeguckt aber leider nichts passendes gefunden. Ich glaube ich werde am Wochende mal einen Prototypen mit Zahnrad und normalen Potentiometer bauen und die größere Ausdehnung erstmal tolerieren.
georg schrieb: > 2. Trimmpotentiometer sind nicht für viele Umdrehungen ausgelegt, das > wird nach kurzer Zeit ausfallen. Potentiometer mit langer Lebensdauer > sind zu gross, Encoder und Synchro Resolver auch. RDC80, sind zwei um 180° vesetzte Potis in einem Gehäuse, dass sogar in ein Modellbauservo passt.
Kolja L. schrieb: > RDC80, sind zwei um 180° vesetzte Potis in einem Gehäuse, > dass sogar in ein Modellbauservo passt. Im Servo ist schon ein Poti. Das könnte man doch anzapfen (wie schonmal weiter oben erwähnt).
Was sind das für Löcher um das Gelenk drum rum? Ist das mit einem 3D Drucker gdruckt? Kansnt du vllt mit einem Abstandssensor (https://www.ebay.de/itm/Infrarot-Abstand-Sensor-Lichtschranke-Hindernisvermeidung-fuer-Arduino-/291801360196) und definierten Löchern arbeiten? Als Nullpunkt könnte dann ein tieferes oder größeres Loch dienen? Ist jetzt mal wieder keine asugereifte Idee, sondern was mir spontan in den Sinn kommt (sorry dafür).
Andre R. schrieb: > Als Nullpunkt könnte dann ein tieferes > oder größeres Loch dienen? Ist jetzt mal wieder keine asugereifte Idee Wirklich nicht, so bekommt man ja keine Absolutanzeige, man muss erst mal den Nullpunkt überfahren. Das ist ganz genau das was der TO vermeiden will bzw. muss. Georg
georg schrieb: > Andre R. schrieb: >> Als Nullpunkt könnte dann ein tieferes >> oder größeres Loch dienen? Ist jetzt mal wieder keine asugereifte Idee > > Wirklich nicht, so bekommt man ja keine Absolutanzeige, man muss erst > mal den Nullpunkt überfahren. Das ist ganz genau das was der TO > vermeiden will bzw. muss. > > Georg Da hast du Recht. Poti direkt ins gelenk einbauen oder mit Zahnrad übersetzung oder die Potis vom Servo sind wohl die besseren Vorschläge. Das ganze mit nem Arduino dauerhaft messen...
Dustin L. schrieb: > Absolut Encoder, magnetische Encoder etc. hab ich mir angeguckt aber > leider nichts passendes gefunden. Dann hast Du aber nicht gut gesucht. Uwes Vorschlag mit den Magnetsensoren wäre mechanisch nämlich sicherlich die einfachste und gleichzeitig auch eine sehr genaue Methode: einen kleinen Scheibenmagneten auf die Schraube kleben, Platine mit IC darüber positionieren - fertig ist ein absolut und mit hoher Auflösung messender Drehgeber. Wir setzen ähnliche ICs auch für Winkelencoder ein, eben weil sie extrem klein gebaut werden können und mechanisch sehr anspruchslos (Fluchtfehler, berührungslos, etc.) sind, bei gleichzeitig erstaunlicher Genauigkeit und Auflösung. > Ich glaube ich werde am Wochende mal > einen Prototypen mit Zahnrad und normalen Potentiometer bauen und die > größere Ausdehnung erstmal tolerieren.
Chris D. schrieb: > Dustin L. schrieb: >> Absolut Encoder, magnetische Encoder etc. hab ich mir angeguckt aber >> leider nichts passendes gefunden. > > Dann hast Du aber nicht gut gesucht. > > Uwes Vorschlag mit den Magnetsensoren wäre mechanisch nämlich sicherlich > die einfachste und gleichzeitig auch eine sehr genaue Methode: einen > kleinen Scheibenmagneten auf die Schraube kleben, Platine mit IC darüber > positionieren - fertig ist ein absolut und mit hoher Auflösung messender > Drehgeber. Hi, also mit einem Sensor dieser Art, wie bereits gepostet (https://www.digikey.de/product-detail/de/infineon-technologies/TLV493DA1B6HTSA2/TLV493DA1B6HTSA2CT-ND/5891933) und einem kleinen Scheibenmagneten auf meinem rotierenden Teil kann ich absolut die Position auf wenige Grad genau bestimmen? Na das wär ja natürlich grandios, entschuldigt, da stand ich auf dem Schlauch. Sobald die Motoren laufen, sollte die Messung jedoch wahrscheinlich verfälscht werden durch das magnetische Feld? Aber mir reicht prinzipiell die Messung im ausgeschalteten Zustand.
Dustin L. schrieb: > also mit einem Sensor dieser Art, wie bereits gepostet > (https://www.digikey.de/product-detail/de/infineon-technologies/TLV493DA1B6HTSA2/TLV493DA1B6HTSA2CT-ND/5891933) > und einem kleinen Scheibenmagneten auf meinem rotierenden Teil kann ich > absolut die Position auf wenige Grad genau bestimmen? Na das wär ja > natürlich grandios, entschuldigt, da stand ich auf dem Schlauch. Ich würde da eher den hier https://www.monolithicpower.com/pub/media/document/datasheet_MA300_rev1.3.pdf (1589-1443-1-ND) nehmen, dann bekommst Du direkt den Winkel mit einer Auflösung von 10 Bit (1024 Schritte pro 360°) geliefert. fchk
Frank K. schrieb: > Ich würde da eher den hier > > https://www.monolithicpower.com/pub/media/document/datasheet_MA300_rev1.3.pdf > > (1589-1443-1-ND) nehmen, dann bekommst Du direkt den Winkel mit einer > Auflösung von 10 Bit (1024 Schritte pro 360°) geliefert. > > fchk Sieht gut aus, leider weiß ich nicht ob ich das noch von Hand gelötet bekomme, wegen der Pads unter dem Chip und bei Mouser scheint es den nicht zu geben, da würde ich den Rest bestellen der Dinge die ich noch brauche.
Dustin L. schrieb: > Sieht gut aus, leider weiß ich nicht ob ich das noch von Hand gelötet > bekomme, Oder das ähnliche Produkt, gleich fertig montiert mit Gehäuse und Stecker sowie einem mitgelieferten Gebermagnet: AEAT-6010-A06 (Mouser-Nr.: 630-AEAT-6010-A06). Grüßle Volker.
Dustin L. schrieb: > Sieht gut aus, leider weiß ich nicht ob ich das noch von Hand gelötet > bekomme, wegen der Pads unter dem Chip und bei Mouser scheint es den > nicht zu geben, da würde ich den Rest bestellen der Dinge die ich noch > brauche. Das Datenblatt sagt "... pad can be soldered ...". Muss also nicht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.