Hi, Ich habe ein Board einem TMC2130 Schrittmotortreiber entwickelt und der Schrittmotor läuft absolut geräuschlos, jedoch entwickelt der IC enorme Hitze, die ich nur mit einem zusätzlichen Kühlkörper abführen kann. Das Thermal Pad hat mehrere Durchkontaktierungen direkt auf die GND Plane und läuft mit je 0.2Ohm Shunts, was einem Strom von etwa 1A RMS entspricht. Jemand eine Idee, warum der TMC2130 im Stealth Chop mode so extrem warm wird? Ohne Kühler kommt der direkt in den Thermal Shunt Down nach etwa 1 Minute (etwa 120°C). Mit einem kleinen Kühlkörper aus Kupfer (40°K/W) kommt der IC noch auf gute 65°C. Der IC hat ja auch einige NC Pins, welche dann ein zusätzliches Abführen der Wärme verunmöglichen. https://www.trinamic.com/fileadmin/assets/Products/ICs_Documents/TMC2130_datasheet.pdf
Angehängte Dateien:
-

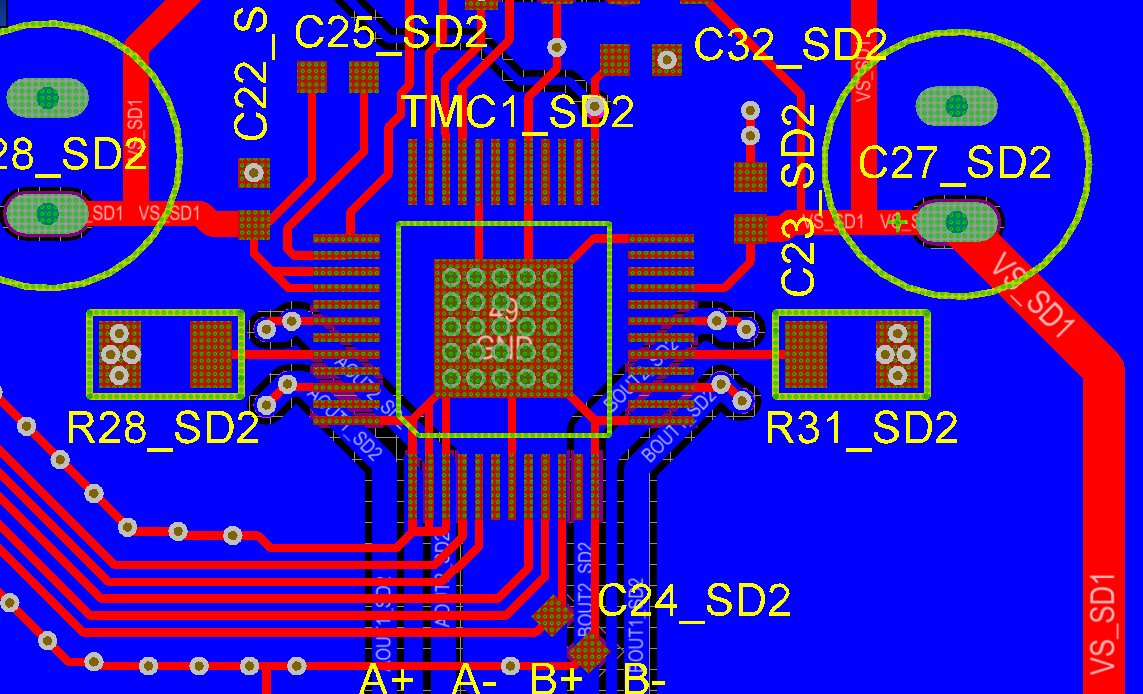
PCB.png
250 KB
Bert S. schrieb: > Jemand eine Idee, warum der TMC2130 im Stealth Chop mode so extrem warm > wird? Wieviel Eingangsspannung gibst du denn dem internen Spannungsregler?
Wolfgang schrieb: > Wieviel Eingangsspannung gibst du denn dem internen Spannungsregler? Ok, ich sehe das Problem, ja der bekommt die vollen 20V. Kein Wunder, dass der so warm wird.
Ich habe mal nur 6V Eingangsspannung verwendet, jedoch wird der TMC2130 auch hier um die 65°C warm. Der Lineare Spannungsregler scheint nicht wirklich viel zu verbraten.
Ich habe folgendes gefunden (Manual Seite 16): "When operating at supply voltages up to 46V for VS and VSA, the internal linear regulator will contribute with up to 1W to the power dissipation of the driver. This will reduce the capability of the chip to continuously drive high motor current, especially at high environment temperatures. When no external power supply in the range 5V to 24V is available, an external pre-regulator can be built with a few inexpensive components in order to dissipate most of the voltage drop in external components." Mit meinen 20V bin ich da noch völlig im Rahmen und ich denke nicht, dass die Leistungsaufnahme vom LVR kommt, da erst bei 46V eine Leistung von 1W anfällt, ich aber locker 2W verbrate. Kann es sein, dass der Stealth Chop Mode aufgrund der hohen frequenz zu mehr Verlusten führt als bei einem herkömmlichen Schrittmotortreiber?
ich habe die TMC2130 noch nie ohne kühler in betrieb gesehen. oft werden zusätzlich sogar lüfter verwendet. die thermal vias die du gemacht hast sind sowieso pflicht. Über ein TO-220 Gehäuse kann man 1W ohne Kühlkörper ganz gut abführen. Wie viel willst du gleich nochmal über dieses winzige QFN abgeben (ohne Kühlkörper)??
Wenn du schon ein nur 2-lagiges Layout nehmen musst, würde ich versuchen, die Massefläche auf der Oberseite so weit es geht zu vergrößern. An den Ecken kommst du damit auch zwischen den Pins durch und kannst dann außerhalb des IC-Gehäuses weitere Fläche belegen. Zusätzlich kannst du dort weitere Vias unterbringen, um die Wärme auch nach unten wegzubringen. Auch die Führung der 4 Ausgangsleitungen auf der Unterseite ist ungünstig, weil du dir damit deine Kühlfläche unnötig abschnürst. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten O. schrieb: > Auch die Führung der 4 Ausgangsleitungen auf der Unterseite ist > ungünstig, weil du dir damit deine Kühlfläche unnötig abschnürst. Ich habe die Abwärme ein wenig unterschätzt, da ich bisher nie thermische Probleme mit Schrittmotortreibern anderer Hersteller hatte. Nun habe ich aber den Shunt auf 0.6A eingestellt und zusammen mit dem Kühlkörper komme ich auf maximal 45°C, was ich so akzeptieren kann, da ich auch nicht mehr Leistung an den Motoren brauche. Für zukünftige Entwicklungen wäre sicher ein 4 Layer Layout besser, wobei mann dann mindestens 2 Masseflächen wählt und auch auf der Oberseite sollte mehr Massefläche vorhanden sein und evtl. auch die Leiterbahnen direkt nach dem IC um einiges vergrössern, so 30mil. Ich habe auch bemerkt, dass unterschiedliche Schrittmotoren den Treiber sehr unterschiedlich beanspruchen, so wird bei einem Motor fast die ganze Leistung im Treiber verbraten und bei einem anderen im Motor selbst, wobei sich dann der Treiber natürlich fast nicht erwärmt. Die Motoren sind beide mit 1A für den Treiber ausgelegt, woher kann das kommen?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.