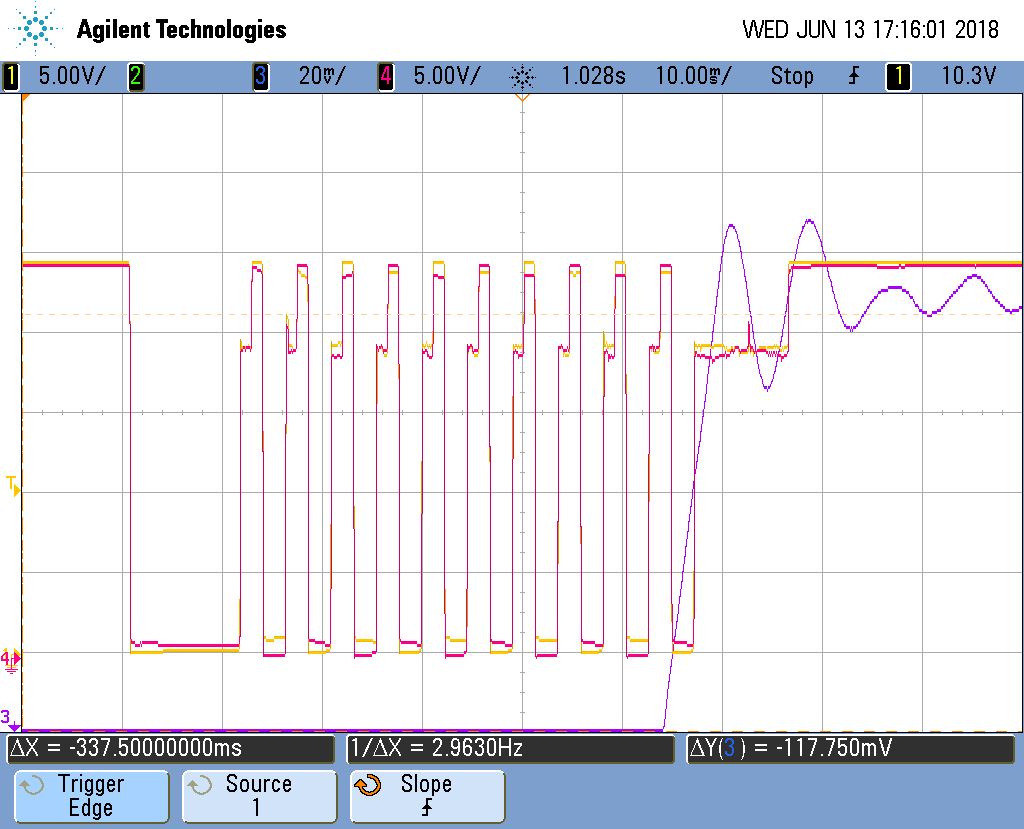
Hallo zusammen, ich habe ein kleines Problem bei einer Applikation bei der ein optisches Filterglas direkt getrieben durch einen Schrittmotor in einen Strahlengang eingeschwenkt wird. Das Trägheitsmoment ist sehr gering, der Schrittmotor kann bist zu 80mNm liefern, für die benötigte Geschwindigkeit wird das nicht ansatzweise ausgereizt. Das ganze ist ein open loop system, Halbschrit. Ich habe nun folgende Beobachtungen gemacht: -bei mittleren Schrittgeschwindigkeiten und hohem Phasenstrom fährt der Motor schnell auf die nächste Schrittposition und oszilliert dort. -bei höheren Schrittgeschwindigkeiten und geringerem Phasenstrom kann ein Punkt erreicht werden bei dem der Rotor dem Drehfeld ohne Schrittverlust folgt, jedoch immer ein kleiner Phase lag besteht. -Beim letzen Schritt jedoch, komme was wolle, ob mit Haltestrom oder Ohne, oszilliert die Motorachse mit dem Filter mit 110...130Hz was sich direkt im optischen Signal niederschlägt und ca. 100ms braucht um abzuklingen. Gibt es eine Möglichkeit dieses Schwingen zu beseitigen? Kann ich das System elektrisch besser bedämpfen? Ich hätte vermutet dass das mit dem Haltestrom skaliert, tut es aber nicht wirklich. Generell hätte ich ja gesagt mit geringerer Geschwindigkeit gegen Bewegungsende aber das Problem tritt ja selbst bei einem einzigen Schritt auf. Auch bei nur ein paar Steps, geringer Step rate und geringem Phasenstorm kommt es zu dieser Oszillation weswegen ich vermute, dass es sich über die Ansteuerung so nicht lösen lässt. Ziel wäre in <20ms auszuschwingen. Mir ist auch unklar wieso diese Schwingung nicht vom Haltestorm gedämpft wird. Ich dachte es wäre auslenkung gegen das Magnetfeld des Haltestroms aka "Feder"-Masse Pendel.
Angehängte Dateien:
-

Schwingen.png
12 KB
Edit: Gelb und Pink sind die Phasenströme am Treiber-Shunt der beiden Wickliungen Lila: optische Signalstärke als Maß für die Vibration des Filterglases
Cab_leer schrieb: > Das Trägheitsmoment ist sehr gering, > der Schrittmotor kann bist zu 80mNm liefern, für die benötigte > Geschwindigkeit wird das nicht ansatzweise ausgereizt. Da sehe ich das Problem. Ein Schrittmotor benötigt immer eine Mindestlast um schwingungsarm zu laufen. Versuche mal ein zusätzliches Gewicht an die Achse zu hängen.
Andreas B. schrieb: > Cab_leer schrieb: > Das Trägheitsmoment ist sehr gering, > der Schrittmotor kann bist zu 80mNm liefern, für die benötigte > Geschwindigkeit wird das nicht ansatzweise ausgereizt. > > Da sehe ich das Problem. Ein Schrittmotor benötigt immer eine > Mindestlast um schwingungsarm zu laufen. > Versuche mal ein zusätzliches Gewicht an die Achse zu hängen. Kannst du mir das näher erklären? Es geht nicht um Schwingung während des Fahrens. Es geht um den letzten Schritt. Wenn ich das Gewicht erhöhe wir die Schwingfequenz niedriger. An der amplitude tut sich fast nichts
Für Schrittmotore gibt es Schwingungsdämpfer, die Resonanzen vermindern sollen. Bietet der Hersteller des Steppers soetwas an? Gegen Resonanzen helfen auch Mikroschritte, aber vermutlich bist Du auf Halbschritte festgelegt?
Cab_leer schrieb: > An der amplitude tut sich fast nichts Das ist ein verlustfreies System, deshalb kann es lange schwingen. Je "fester" du die Position hältst (mehr Strom), um so höher wird die Schwingfrequenz. Je größer du die Masse machst, um so niedriger wird sie. Was du brauchst, um die Schwingung zu dämpfen, ist ein Verlust in diesem System. Wenn du den mit einem Finger (oder sonstwie) "bremst", dann wird das Ding nicht so lange/weit schwingen, weil die Energie nicht ins "Schluss-brrrrrrr", sondern in die Bremse geht.
> Für Schrittmotore gibt es Schwingungsdämpfer, die Resonanzen vermindern > sollen. Ich denke man kann mit einem Gewicht die Resonanzfrequenz verschieben und damit damit fuer eine bestimmte Anwendung verhindern kann. Ich glaub aber nicht das dies hier viel helfen wird. In dem Fall braeuchte der Schrittmotor eher eine bedaempfung, also etwas das die Mechanische Energie vernichtet die im System steckt. Olaf
Wie schon erwähnt wurde, helfen Mikroschritte deutlich, einen schwingungsarmen Betrieb zu realisieren. Aber auch im Halbschrittbetrieb sollte das machbar sein... Fährst du den Motor etwa von Start bis Ziel mit konstanter Schrittfrequenz? Hier ist es entscheidend, geeignete Beschleuniguns- und Bremsrampen zu verwenden, also die Schrittfrequenz aus dem Stand langsam auf Fahrgeschwindigkeit zu steigern und rechtzeitig vor Erreichen der Endposition wieder bis zum Stop zu verringern. gewöhnlich reichen lineare Rampen. Vorteilhaft für schwingungsarmen Betrieb wäre auch ein Schrittmotor mit möglichst vielen Schritten pro Umdrehung, also möglichst kleinem Schrittwinkel. Die üblichen Motoren mit 2° Vollschrittwinkel, also 180 Schritten pro Umdrehung, sollten passen. Das wären dann 180 Halbschritte für die 180° Rotation zum Einschwenken des Filters...
Hallo Cab_leer, irgendwie sehen die Ströme komisch aus: 1. gleiche Phase, 2. Stufe vor Maxwert 3. Stufe vor Ausschwingen Kannst Du die Ströme selber steuern? Gruß Bernd
Cab_leer schrieb: > Kann ich das > System elektrisch besser bedämpfen? Ich hätte vermutet dass das mit dem > Haltestrom skaliert, tut es aber nicht wirklich. Aus dem Bauch raus: Zum elektrischen Dämpfen braucht man etwas das Energie absorbiert, etwas an dem die Spule Arbeit verrichten kann wie im einfachsten Fall ein ohmscher Widerstand. Wenn der Haltestrom an ist wäre das der Innenwiderstand des Treibers. Hast Du mal ausprobiert wie/ob sich das Verhalten ändert wenn Du den erhöhst? Ansonsten fällt mir noch ein den Aufbau mechanisch zu dämpfen (Reibung).
Seite B-300 zeigt "Clean Damper": http://www.orientalmotor.com/products/pdfs/SteppingMotors/Acc_B297-B307.pdf
Bernd K. schrieb: > Wenn der Haltestrom an ist wäre das der Innenwiderstand des Treibers. Eine Konstantstromquelle (das ist ein Stromregler für den Haltestrom) hat theoretisch einen unendlich hohen Innenwiderstand... m.n. schrieb: > Seite B-300 zeigt "Clean Damper" Ich könnte mir auch eine Aluscheibe mit einem Magneten vorstellen: Wirbelstrombremse.
m.n. schrieb: > Für Schrittmotore gibt es Schwingungsdämpfer, die Resonanzen vermindern > sollen. Bietet der Hersteller des Steppers soetwas an? > Gegen Resonanzen helfen auch Mikroschritte, aber vermutlich bist Du auf > Halbschritte festgelegt? Die Aufgabe der Schwingungsdämpfer ist es ja eher den Fahrbetrieb ruhig zu gestalten und nicht das Einschwingen der Position beim letzen Schritt zu dämpfen. Abgesehen davon habe ich dafür auch keinen Platz. Lothar M. schrieb: > Das ist ein verlustfreies System, deshalb kann es lange schwingen. Je > "fester" du die Position hältst (mehr Strom), um so höher wird die > Schwingfrequenz. Je größer du die Masse machst, um so niedriger wird > sie. > > Was du brauchst, um die Schwingung zu dämpfen, ist ein Verlust in diesem > System. Wenn du den mit einem Finger (oder sonstwie) "bremst", dann wird > das Ding nicht so lange/weit schwingen, weil die Energie nicht ins > "Schluss-brrrrrrr", sondern in die Bremse geht Ich habe interesanterweise keinen Unterschied in Schwingungsamplitude und Dauer messen können, egal ob mit oder ohne haltestorm. Ich kann den in 6 Bit Variieren. Es bringt keine Verbesseurng. Das Bremsen also eine Bedämpfung über Reibung könnte eine Idee sein. Nur die Frage wie man das langlebig und zeitstabil implementiert. Solange man dabei die Beschleunigung / Vmax nicht zu sehr verringert. Thosch schrieb: > Wie schon erwähnt wurde, helfen Mikroschritte deutlich, einen > schwingungsarmen Betrieb zu realisieren. > > Aber auch im Halbschrittbetrieb sollte das machbar sein... > Fährst du den Motor etwa von Start bis Ziel mit konstanter > Schrittfrequenz? > Hier ist es entscheidend, geeignete Beschleuniguns- und Bremsrampen zu > verwenden, also die Schrittfrequenz aus dem Stand langsam auf > Fahrgeschwindigkeit zu steigern und rechtzeitig vor Erreichen der > Endposition wieder bis zum Stop zu verringern. > > gewöhnlich reichen lineare Rampen. > > Vorteilhaft für schwingungsarmen Betrieb wäre auch ein Schrittmotor mit > möglichst vielen Schritten pro Umdrehung, also möglichst kleinem > Schrittwinkel. Die üblichen Motoren mit 2° Vollschrittwinkel, also 180 > Schritten pro Umdrehung, sollten passen. > Das wären dann 180 Halbschritte für die 180° Rotation zum Einschwenken > des Filters... Ich bin nicht auf Halbschritt festgelegt. (Nutze den Allegro A3992)Ich werde definitiv noch den Mikroschrittbetrieb testen. Allerdings hilft mir das Thema Beschleunigungsrampe nicht weiter, weil es ja selbst bei einem einzigen Schritt zu dieser Vibration kommt. Ich habe das Phänomen unabhängig von der Step rate. Der Motor hat 1.8° Schrittwinkel. Ist ein NMB, also kein Billigschrott. Bernd B. schrieb: > Hallo Cab_leer, > > irgendwie sehen die Ströme komisch aus: > > 1. gleiche Phase, > 2. Stufe vor Maxwert > 3. Stufe vor Ausschwingen > > Kannst Du die Ströme selber steuern? > > Gruß > > Bernd Ja kann ich. Allegro A3992. Du hast recht mit den Strömen. Das in diesem Bild war noch die Messung der Phasenspannung. Die Stormmessung hate ich erst ein paar Bilder später angeschlossen. Sorry für die Verwirrung. Die Stufe vor dem Ausschwingen war zeitlich begrenzter Haltestorm. Ist mittlerweile konstant und unbegrenzt. Bernd K. schrieb: > Aus dem Bauch raus: Zum elektrischen Dämpfen braucht man etwas das > Energie absorbiert, etwas an dem die Spule Arbeit verrichten kann wie im > einfachsten Fall ein ohmscher Widerstand. Wenn der Haltestrom an ist > wäre das der Innenwiderstand des Treibers. Hast Du mal ausprobiert > wie/ob sich das Verhalten ändert wenn Du den erhöhst? > > Ansonsten fällt mir noch ein den Aufbau mechanisch zu dämpfen (Reibung). Haltestrom wurde von 0 bis max variiert. Keinen nennenswerten Einfluss
Cab_leer schrieb: > Haltestrom wurde von 0 bis max variiert. Keinen nennenswerten Einfluss Klar hat der eingestellte Strom keinen Einfluß, ist doch logisch, der ändert ja nichts am Innenwiderstand der Quelle. Deshalb schlug ich ja vor mal den Ohmschen Widerstand zu variieren den der Motor sieht, an dem er dann Arbeit verrichten kann. Wenn der Treiber eine hochohmige Stromquelle ist dann müsstest Du einen Widerstand parallelschalten.
Du kannst das "Regelungstechnisch" in den Griff kriegen, indem Du soweit vorher abschaltest, dass er dort wo Du willst zum Stillstand kommt. Oder indem Du um den Stillstandspunkt jeweils in die Gegenrichtung ziehst. Oder indem du kurz nach der ersten Umkehrung abschaltest bzw. auf 0 runter fährst.
Bernd K. schrieb: > Klar hat der eingestellte Strom keinen Einfluß, ist doch logisch, der > ändert ja nichts am Innenwiderstand der Quelle. Deshalb schlug ich ja > vor mal den Ohmschen Widerstand zu variieren den der Motor sieht. Wenn > der Treiber eine hochohmige Stromquelle ist dann müsstest Du einen > Widerstand parallelschalten. Probiere ich gerne mal. Kannst du mir da vllt noch mehr zum Hintergrund erklären. Mein bisheriges Verständnis war dass die Magnetische Feldstärke der Windungen proportional zum Windungsstrom, im Fall des Stillstandes also dem Haltestorm ist. Die Kinetische Energie die noch im Rotor Steckt lenkt diesen innerhalb des Magnetfelds von seiner Sollposition aus -> Kraftwirkung erhöht sich und treibt den Motor zurück Richtung magnetischer Sollposition. Diese Oszillation sollte doch in ihrer Frequenz von magnetischer Feldstärke und Massenträgheitsmoment des Rotors, und in ihrer Amplitude von der initialen kinetischen Energie abhängen oder liege ich da total falsch? Was den Widerstand betrifft: Parallel zur Windung?
Mir fielen spontan diese beiden Ideen ein: 1) Eine Regelung: du kannst das Ausgangssignal ja messen, also auch die Schwingung. Da du die Schwingung messen kannst, kannst du auch gegenan regeln. Die Auslegung eines Reglers hierfür ist aber eine "interessante Herausforderung". 2) Du "imitierst" einen sogenannten Dead-Beat-Regler, aber ohne zu regeln. Dieser tut im Wesentlichen das: erstmal Volldampf geben bis das Ausgangssignal einen bestimmten Wert erreicht hat, dann negativ etwas weniger Dampft drauf geben, um zu bremsen. Danach den Wert annehmen, der das Ausgangssignal auf dem Endwert hält. Hier würde das bedeuten: wurde der letzte Schritt getan, warte weniger als die Dauer des letzten Schrittes und springe einen Schritt zurück. Dann nach noch kürzerer Zeit springe wieder einen Schritt vor. So kannst du vor dem Überschwingen bremsen und durch das Zurückspringen auf den Endwert das Ausgangssignal stabilisieren. Ich vermute, dass hier einiges an Experimentieren nötig ist und nicht sicher ist, dass es so funktionieren kann. Aber da sich dein System mit Spiegel am Stepper nicht ändert (sprich die Masse nicht variiert), könnte sich ein einmal ermitteltes Ergebnis auf andere gleiche Systeme übertragen lassen...
Sehe ich das richtig, dass wir hier primär ein mechanisches Problem haben, dass man mit elektrischen Mitteln zu lösen versucht? Wenn dem so ist, bin ich der Meinung, dass man es mechanisch lösen sollte, denn dann ist man näher an der Problemursache. Wenn man versucht, die Schwingung elektrisch zu bedämpfen, hat man eine weitere Komponente mit Schwingneigung dazwischen, nämlich die magnetische Koppelung.
Cab_leer schrieb: > Die Aufgabe der Schwingungsdämpfer ist es ja eher den Fahrbetrieb ruhig > zu gestalten und nicht das Einschwingen der Position beim letzen Schritt > zu dämpfen. Hier irrst Du! Cab_leer schrieb: > Allerdings hilft mir das Thema Beschleunigungsrampe nicht weiter, weil > es ja selbst bei einem einzigen Schritt zu dieser Vibration kommt. Auch hier. Klopfe mal mit einem Hammer gegen ein Glocke und dann mit einem Nagel. Die Vibrationen bei unterschiedlicher Anregung sind gleich? Wohl kaum!
> Sehe ich das richtig, dass wir hier primär ein mechanisches Problem > haben, dass man mit elektrischen Mitteln zu lösen versucht? Du hast beides. Daher ist Microschritt sicher schonmal eine gute Idee weil man weniger differenzielle Energie im letzten Schritt haben wird. Wenn das was dann ueber bleibt aber zu gross ist dann wird man doch auch zusaetzlich zu einer mechanischen Loesung greifen muessen. Und es ist vermutlich auch sinnvoll den Motor nur so gross zu waehlen wie noetig, aber nicht groesser. Olaf
Angehängte Dateien:
-

solaris_filt14.png
15 KB
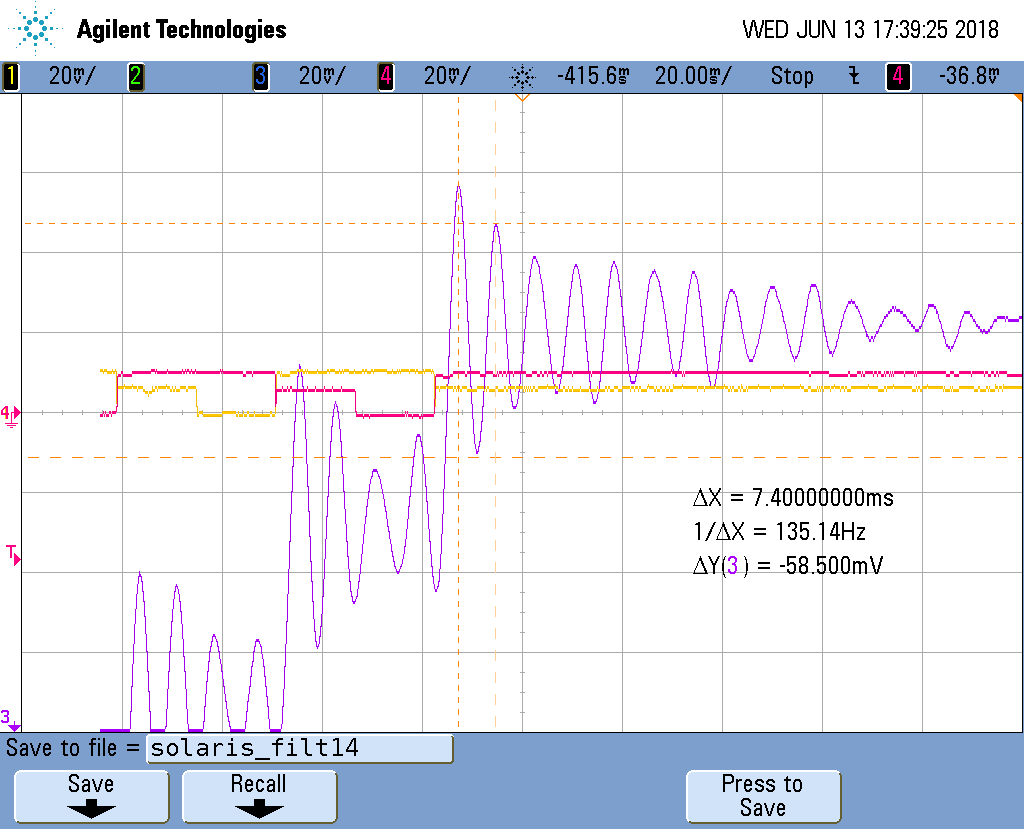
Felix schrieb: > 1) Eine Regelung: du kannst das Ausgangssignal ja messen, also auch die > Schwingung. Da du die Schwingung messen kannst, kannst du auch gegenan > regeln. > Die Auslegung eines Reglers hierfür ist aber eine "interessante > Herausforderung". Nicht wirklich. Das Ausgangssignal ist nur für diesen Versuch konstant. In der tatsächlichen Applikation ist es von der Messgröße des Gesamtgerätes moduliert. taugt also nicht als Regelgröße. Ausserde wird regeln innerhalb eines Schrittes wohl sportlich. Die Dead Beat Idee klingt spannend. Allerdings unter der Vorraussetzung dass die Geräte hinreichend gering voneinander abweichen und nicht für jedes Gerät neue Regelparameter gefunden werden müssen. m.n. schrieb: > Cab_leer schrieb: >> Allerdings hilft mir das Thema Beschleunigungsrampe nicht weiter, weil >> es ja selbst bei einem einzigen Schritt zu dieser Vibration kommt. > > Auch hier. Klopfe mal mit einem Hammer gegen ein Glocke und dann mit > einem Nagel. Die Vibrationen bei unterschiedlicher Anregung sind gleich? > Wohl kaum! Jein. Ich setze den Strom so, dass ich in der Lage bin Vmax zu erreichen. Verrringere ich jetzt die Schrittrate aka Bremsrampe, erreicht der Motor in einem Bruchteil der Schrittzeit seine Sollposition und beginnt dort zu oszillieren. Ich müsste also wenn nicht einfach nur die Schrittrate verringern sondern auch den Windungsstrom verkleinern. Im Bild sieht man was bei deutlich kleinere Schrittfrequenz passiert. Dann oszilliert es zusätzlich noch bei jedem Schritt, nicht nur beim letzen. Ich muss aber Vmax UND die schnelle Einschwingzeit befriedigen. Sonst könnte ich ja einfach Steprate UND Windungsstrom deutlich verringern.
Ich muss mal blöd fragen: Wenn der Filter seitlich in den Strahlengang eingeschwenkt wird, und er am Ende der Schwenkbewegung noch etwas wackelt, weshalb sollte die Strahlenintensität schwanken? Der Filter sollte doch einigermaßen homogen sein, d.h. eine seitlich Verschiebung ändert nichts an der Durchlässigkeit. Ist nicht vielleicht so, dass das gemessene optische Signal aufgrund der schnellen und hohen Intensitätsänderung ein Überschwingen in der Empfangselektronik provoziert? Oder vlt. ist auch nur so, dass die Bewegung des Filters ein Vibrieren des opt. Empfängers verursacht. Die könnnen auch stark empfindlich sein, was Einstrahlwinkel und -position betrifft. Dann sollte man den Motor mechanisch vom Rest entkoppeln bzw. dämpfen.
Ich vermute auch, dass hier ein mechanisches Problem vorliegt, welches man mit dem verwendeten Motor und dessen Ansteuerung nicht in den Griff kriegt (bzw. nicht regeln kann, aufgrund zu geringer Schrittauflösung, ...). Die unerwünschte Schwingung zeigt sich scheinbar unbeeindruckt von den bisherigen Verbesserungsversuchen. Heißt in vielen Fällen, dass die Lösung des Problems an anderer Stelle zu suchen ist. Kannst du eine Skizze oder noch besser ein Foto des Aufbaus hochladen. Vielleicht sticht dann etwas ins Auge. lg Flo
Flo schrieb: > Die unerwünschte Schwingung zeigt sich scheinbar unbeeindruckt von > den bisherigen Verbesserungsversuchen. Wenn Dämpfer und Mikroschritte nicht verwendet werden (können/dürfen), ist das ja auch kein Wunder ;-)
Kann es sein daß Dein ganzer Aufbau schwingt, die Grundplatte, einfach alles? Stampf mal mit dem Fuß auf den Boden, klopf mal an anderer Stelle. Häng den ganzen Motor samt allem was dran hängt an Gummidämpfern auf.
Christian S. schrieb: > Ich muss mal blöd fragen: Wenn der Filter seitlich in den Strahlengang > eingeschwenkt wird, und er am Ende der Schwenkbewegung noch etwas > wackelt, weshalb sollte die Strahlenintensität schwanken? Der Filter > sollte doch einigermaßen homogen sein, d.h. eine seitlich Verschiebung > ändert nichts an der Durchlässigkeit. > Ist nicht vielleicht so, dass das gemessene optische Signal aufgrund der > schnellen und hohen Intensitätsänderung ein Überschwingen in der > Empfangselektronik provoziert? Oder vlt. ist auch nur so, dass die > Bewegung des Filters ein Vibrieren des opt. Empfängers verursacht. Die > könnnen auch stark empfindlich sein, was Einstrahlwinkel und -position > betrifft. Dann sollte man den Motor mechanisch vom Rest entkoppeln bzw. > dämpfen. Der Filter wird nicht Linear verschoben sondern dreht sich, die Schwingung verursacht also einen Winkelfehler die sowohl einen Strahlversatz als auch Modulation der Fresnellreflektionen verursacht. Der Aufbau ist so ausgesteift dass da nichts vibriert. (ist mit dem Filterhalter ohne Glas getestet). Das system hat 24 Bit Dynamikumfang und einen Photomultiplier. Gussgehäuse etc.... also da kommt nichts aus der Mechanik. Und die Signale sind hinreichend sauber und Stabil. Die Bandbreite des ADd der Messelektronik sind 300kHz,die Signalkette davor eine Größenordnung darüber. also auch ausreichend. m.n. schrieb: > Flo schrieb: >> Die unerwünschte Schwingung zeigt sich scheinbar unbeeindruckt von >> den bisherigen Verbesserungsversuchen. > > Wenn Dämpfer und Mikroschritte nicht verwendet werden (können/dürfen), > ist das ja auch kein Wunder ;-) Mikroschritte werden jetzt implementiert. Dämpfer ist keine Option wegen des Platzbedarfs und des zusätzlichen Massenträgheitsmoments. Bernd K. schrieb: > Kann es sein daß Dein ganzer Aufbau schwingt, die Grundplatte, einfach > alles? Stampf mal mit dem Fuß auf den Boden, klopf mal an anderer > Stelle. Häng den ganzen Motor samt allem was dran hängt an Gummidämpfern > auf. Nein. Absolut Steif. Und das Gerät steht zusätzlich noch auf einem luftgelagerten optischen Tisch.
... man müsste sicher sein, dass die Schwingungen nicht aus der Elektronik kommen. Wer weiss, was dort für ein Verstärkersystem am Multiplier ist. Bernd
Achim S. schrieb: > Du kannst das "Regelungstechnisch" in den Griff kriegen, indem Du soweit > vorher abschaltest, dass er dort wo Du willst zum Stillstand kommt. Oder > indem Du um den Stillstandspunkt jeweils in die Gegenrichtung ziehst. > Oder indem du kurz nach der ersten Umkehrung abschaltest bzw. auf 0 > runter fährst. Das wird eher dazu führen, dass Zufall ins Spiel kommt. Das muss aktiv gesteuert werden.
Wieso verursacht die Einschwenkbewegung einen Winkelfehler am Filter? Bei allen derartigen Mechanismen, die ich aus optischen Geräten kenne, verläuft der Strahlengang parallel zur Motorwelle, der bzw. die einzuschwenkenden Filter sind in ein Rad montiert, das auf der Motorwelle sitzt, bzw. untersetzt von dieser angetrieben wird, z.B. durch einen darumgelegten Zahnriemen... Für schwingungsarmen Betrieb sind so die Vorraussetzungen auch günstig, weil die bewegten Massen nah an der Motorwelle liegen. Außerdem entsteht so eben kein positionsabhängigrr Winkelfehler.
Ich sage ja: Es ist primär ein mechanisches Problem. Selbst Stimmgabeln aus massivem Stahl schwingen stark. https://www.barthelmes.info/files/images/produkte/musik/440-432-hz-stimmgabel.jpg
{kind=link}
muss es denn ein schrittmotor sein? um etwas ein und auszuschwenken würde ein zugmagnet oder ein drehmangnet reichen
Ich würde ja auch darauf tippen das durch die geringe Masse einfach jedwede mechanische Dämpfung fehlt. Am besten einfach mal bei einem der Deutschen Hersteller nachfragen und denen das genaue Problem schildern. z.B.: https://de.nanotec.com/produkte/288-daempfer/
Stefanus F. schrieb: > Ich sage ja: Es ist primär ein mechanisches Problem. Bei dem geschilderten Aufbau: Unwahrscheinlich. Ich sehe - wie immer - das Problem eher auf der mentalen Ebene. Die Wurzel des Bösen (sollte ich vielleicht im Kontext von Motoren eher sagen: Die ACHSE des Bösen?) liegt in der verbreiteten Formulierung: "... der Schrittmotor macht einen Schritt." Wenn man nämlich der Frage nachspürt: "Warum macht ein Schrittmotor Schritte?", dann kommt man zu der saudämlichen, aber sachlich richtigen Antwort: "Weil er SCHRITTWEISE ANGESTEUERT wird!" Nehme ich mir eine beliebige andere rotierende elektrische Maschine und steuere sie mit derart rustikalen Impulsen an, wie das bei Schrittmotoren gemacht wird, so wird auch diese andere rotierende elektrische Maschine in spastische Zuckungen verfallen. Umkehrschluss: Wenn man dem "Schrittmotor" ein vernünftiges, einigermaßen gleichmäßiges Drehfeld anbietet, gibt es keinen Grund, dass er "Schritte" macht. Aus mir unbekannten Gründen ist die "komplizierte" Vorstellung eines mit ggf. variabler Geschwindigkeit rotierenden Drehfeldes für Anwender von Schrittmotoren nicht akzeptabel. Ich meine... jeder Umrichter für Drehstrom-Asynchronmotoren kann das heute. Aber nein -- es MÜSSEN Schritte sein, und man MUSS sich anschließend mit den Problemen herumärgern, die durch diese unzulässig vereinfachte Vorstellung hervorgerufen werden. Anders wäre es nicht "professionell". Da könnte ja jeder kommen.
Das ein Schrittmotor nicht "digital" von einer Schrittposition zur nächsten springt oder dreht, sollte eigentlich einleuchten. Bei höheren Drehzahlen ergibt sich noch eine quasi-kontinuierliche Drehbewegung, bei niedrigen Schrittraten oder Einzelschritten sieht das ganz anders aus. Ich habe vor ein paar Jahren mal einige Messungen dazu gemacht, Voll- und Halbschritt, mit und ohne Dämpfer: http://www.schrittmotor-blog.de/einschwingverhalten-von-schrittmotoren/ Lösungsmöglichkeiten sind ja schon genannt worden. Alles zielt darauf, die Stärke der Sprünge in der Bewegung zu reduzieren: - Mikroschritt statt Halbschritt - Brems- und Beschleunigungsrampe - Motor mit höherer Auflösung (0,9° Vollschritt) - Einbringen zusätzlicher Dämpfung durch Reibung oder ein Dämpferelement - Reduzieren des Motorstroms soweit wie möglich - Stoppen auf Position kurz vor dem Ziel, dann nochmal 1-2 Schritte einzeln fahren Für einen Motor mit Getriebe dürfte kein Platz sein, wenn schon ein Dämpfer nicht unterzubringen ist. Ich würde noch Ausgleichsmassen ins Spiel bringen, die ähnlich wie bei einem Kran oder einer Bahnschranke dafür sorgen, dass die Mechanik in den Endlagen in einem stabilen Gleichgewicht ist. Mit freundlichen Grüßen Thorsten Ostermann
Im Stillstand ist der Motor nicht auf einer Position fixiert, sondern kann etwas um die Position schwingen, als eine Drehschwingung. Eine Reduktion des Motorstromes verringert vor allem die Frequenz bringt aber eher keine extra Dämpfung - ein hoher Motorstrom und die damit höhere Frequenz kann eher vorteilhaft sein. Entsprechend sollte man auch nicht extra viel Masse haben. Für extra Dämpfung wäre ggf. die Idee mit dem parallelen Widerstand möglich - die Dämpfung ist aber auch begrenzt. Wenn man immer auf Halbschritten stehen bleibt könnte man ggf. die unbestromte Windung aktiv kurzschließen. Mikroschrittbetrieb sorgt für weicheren Lauf und reduziert die Anregung der möglichen Schwingung, bringt aber keine extra Dämpfung. Wirklich effektiv wird der Miroschritt-betrieb mit einer passende Rampe am Ende.
Kann mir mal einer erklären wie man mechanische Schwingungen oszilloskopieren kann? Rechteckimpulse kommen vom Treiber. Sinusschwingungen dagegen deuten auf EMK der Motore hin, aber die müssten von den Freilaufdioden der Treiber-Fets (A3992) gekillt werden. In der Endposition muss der Motor auch bestromt (Haltemoment) werden. Ich vermute da eher ein Softwareproblem. Man kann übrigens Motorstörungen ausschließen, wenn man zur Messung der Treibersignale stattdessen Lastwiderstände statt des Motors anschließt. Ein mechanisches Problem sehe ich da nicht, aber ich lasse mich gern vom Gegenteil überzeugen.
Hallo Cerberus, Cerberus schrieb: > Kann mir mal einer erklären wie man mechanische Schwingungen > oszilloskopieren kann? ... > Ein mechanisches Problem sehe ich da nicht, > aber ich lasse mich gern vom Gegenteil überzeugen. Mit einem geeigneten Messsysstem, z.B. einem Encoder oder einem Potentiometer. Die Messungen in meinem Blogbeitrag hast du dir angesehen? Wenn das zu deiner Überzeugung nicht ausreicht weiß ich nicht, was du noch benötigst. Mit freundlichen Grüßen Thorsten Ostermann
Cerberus schrieb: > Kann mir mal einer erklären wie man mechanische Schwingungen > oszilloskopieren kann? Cab_leer schrieb: > Lila: optische Signalstärke als Maß für die Vibration des Filterglases Beispielweise mit einer Lichtschranke, deren Strahl auf der Zielposition halb von einen mitlaufenden Blende unterbrochen wird. Die durchgelassenen Intensität ändert sich an der Kante mit der genauen Lage der Blende, der Strahldurchmesser legt die Steilheit des Übergangs fest.
Ups, da ich habe mich wohl zu allgemein ausgedrückt. Ich bezog mich natürlich auf das Problem des TO und das er seine Oszillogramme durch Sensoren von der Mechanik erhält, dafür gibt es keine Beschreibung. Deswegen wollte ich eben wissen, wie die Messdaten entstanden und zu interpretieren sind.
Es gab in der DDR Typeradscheibmaschinen und Typenraddrucker (Daisy Wheel) die recht schnell waren. Für die Positionierung des Typenrades und des Druckwagens wurden da Reluktanz-Schrittmotoren verwendet. Die Ansteuerung erfolgte kombiniert Digital-Analog, d.h. es wurden Schritte gefahren und nach Stop analog gedämpft. Dazu war es notwendig das auf der Motorachse jeweils an Positionsgeber saß, auf der Typenradachse war dieser optisch und auf der Wagenmotorachse kapazitiv und lieferte jeweils 2 sinusförmige analoge Signale. Damit war es möglich für einen Daisywheel Printer recht hohe Geschwindigkeiten von 40 Zeichen/sek zu erzielen. Wenn den TO Schaltungsdetails interessieren kann ich sicher was raussuchen, Schreibmaschine hieß S6001, der Drucker SD1152 (Exportversion CBM8028 z.B.), die Schrittmotorendstufen waren dort allerdings "zu Fuß" aufgebaut. Gruß, Holm
Holm T. schrieb: > Dazu war es notwendig > das auf der Motorachse jeweils an Positionsgeber saß, Dafür oder für einen Dämpfer scheint ja wohl kein Platz mehr vorhanden zu sein. Ein Umbau auf BLDC wird vermutlich auch zu aufwendig. Übrig bleibt wohl allein, die Lager mit "Dämpfpaste" zu schmieren, damit sich die Achse nicht wie geschmiert bewegen/schwingen kann ;-)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.