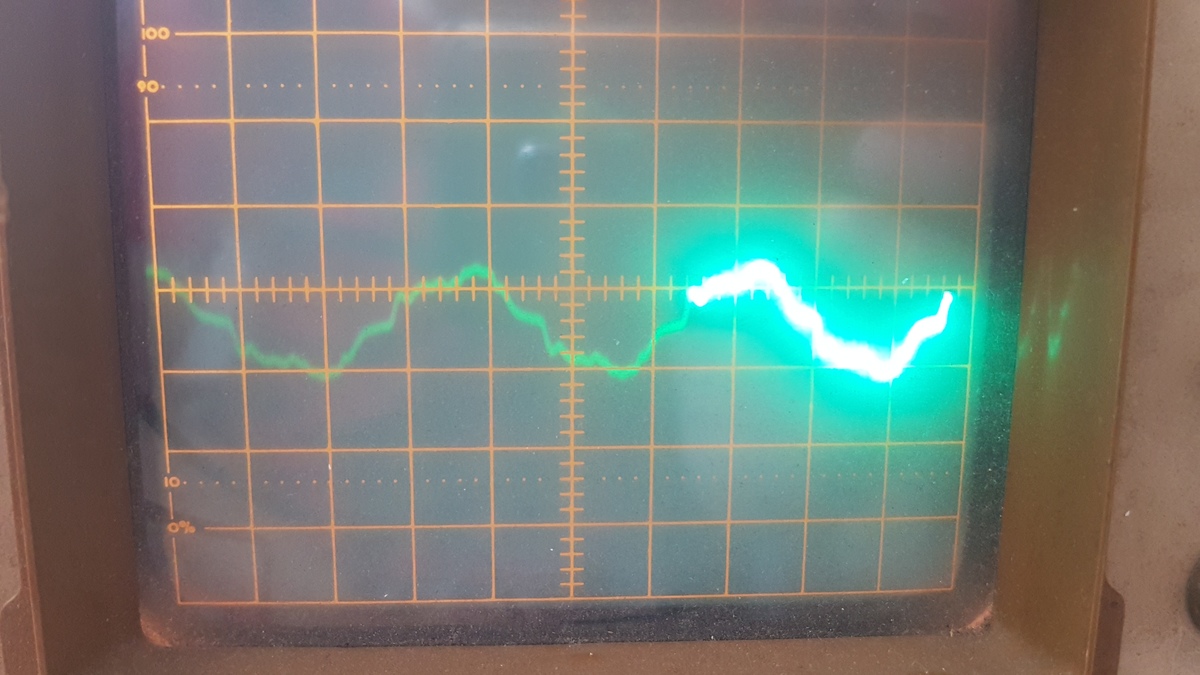
Hallo liebe Community, Ich habe von meinem Saugroboter, bei dem der Antrieb nicht mehr vernünftig funktioniert versucht den Fehler herauszufinden. Ich bin auf die Schlussfolgerung getroffen, dass entweder er Magnet für den Encoder der Positions bzw Geschwindigkeitserkennung oder die Hallsensoren um das Signal die Position zu erkennen ein Problem haben. Ich habe den Hall Sensor extern versorgt und mittels eines Oszilloskop das Signal aufgenommen. Sollte der Hallsensor kein Rechtecksignal erzeugen? (Siehe Bild) Es handelt sich um den ATS177. Ihr würdet mir sehr helfen das Problem zu lösen. Vielen Dank
Angehängte Dateien:
-

20180623_125426.jpg
230 KB
Hannes D. schrieb: > Sollte der Hallsensor kein Rechtecksignal erzeugen? (Siehe Bild) Das was du da siehst, ist einzig und alleine ein eingestreutes Netzbrummen - jedenfalls soweit man das ohne irgendwelche Angaben zu Zeit- und Y-Ablenkung erkennen kann. Hängt dein Oszi mit beiden Polen über der zu messenden Spannung? ;-)
Hannes D. schrieb: > Sollte der Hallsensor kein Rechtecksignal erzeugen? (Siehe Bild) nein, siehe Datenblatt.(ATS177) Der zieht nur gegen Masse, Pullup musst du selber einbringen.
Ich messe am GND und DO (also dem Outputsignal). Nachdem ich 5mV/Dekade bei 5ms einstellt habe messe ich wohl nicht das richtige Signal :(. Am Vcc und GND lege ich die gewünschte Spannung von 4,3V DC an.
Hannes D. schrieb: > Ich messe am GND und DO (also dem Outputsignal). Und wie groß ist dein Arbeitswiderstand aka Pull-Up? (R1 it "Typical Application Circuit" im Datenblatt)
Angehängte Dateien:
-

20171114_214456_4.jpg
230 KB
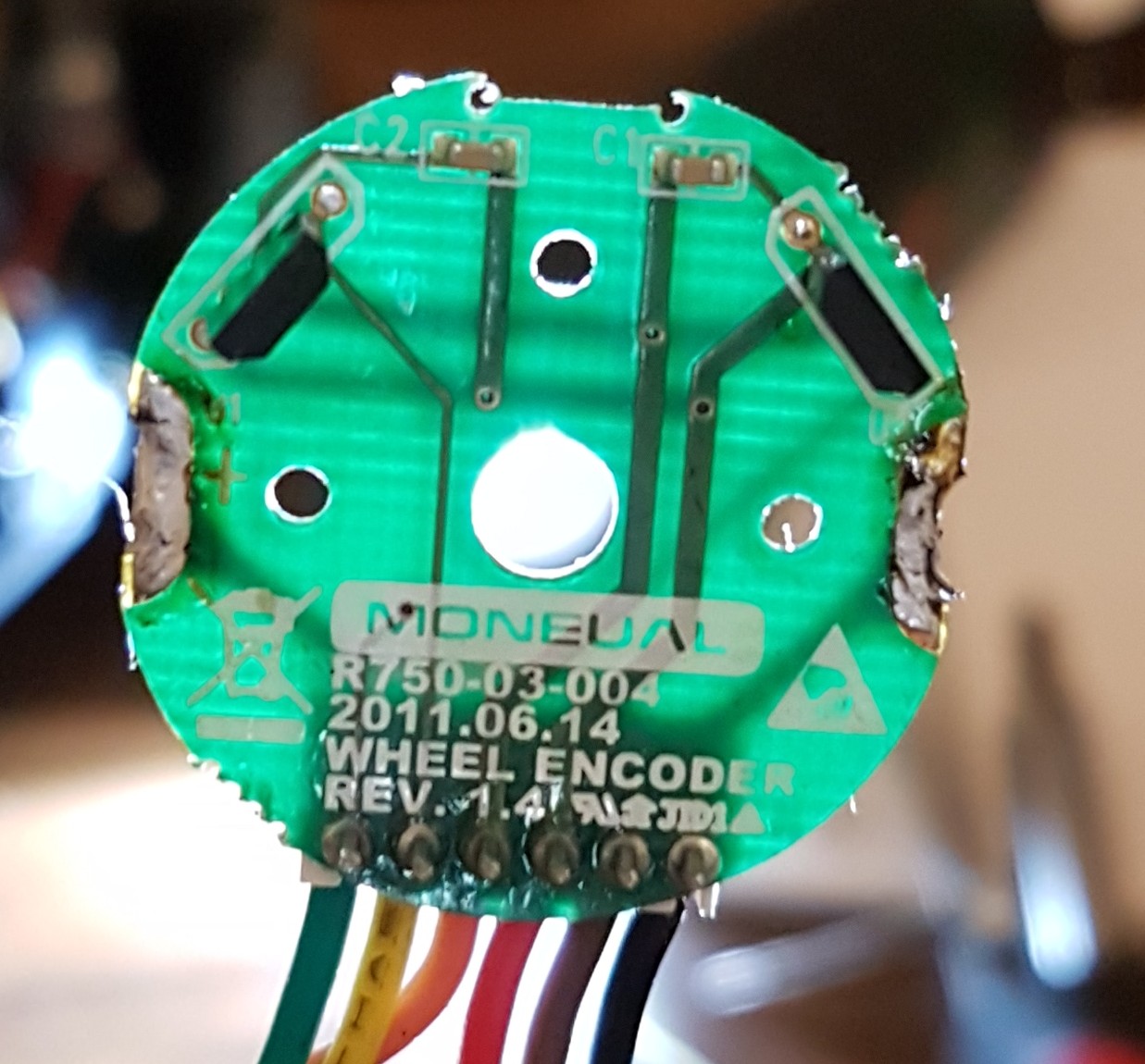
Ich habe direkt am Encoder Board gemessen. Darauf befindet sich lediglich ein Kondensator zwischen GND und Vcc. Kann es am fehlenden RL liegen? Dieser kann sich dann nur auf der Hauptplatine des Saugroboters befinden.
Hannes D. schrieb: > Ich habe von meinem Saugroboter, bei dem der Antrieb nicht mehr > vernünftig funktioniert Wie äußert sich denn seine Unvernunft? Wenn du ihm Vernunft beibringen willst, musst du schon vernünftig Datenblätter lesen. Ob und wo ein externer Pullup existieren kann dir hier keiner beantworten(Glaskugel nich mit angehangen). Vielleicht wird auch ein Pullup im Controller verwendet? Hall-Sensoren haben ja nichts zu Arbeiten, wie kommst du drauf, das die kaputt sind? Läuft der Motor ohne Hall-Sensoren auch, nur etwas unvernünftig?
Der Motor läuft nicht Rund, sondern bei kleinster Last beginnt er zu stottern. Ich werde die Messung mit dem im Datenblatt angegebene 820Ohm Pull-Up Widerstand noch einmal durchführen. Ich bin davon ausgegangen, dass sich auf einer Encoder Platine doch alle dafür nötigen Bauteile befinden. Wenn ich den Motor extern versorge, dann läuft dieser ohne Probleme, auch bei erhöhter Last beginnt er nicht zu zittern. Anfangs hatte ich dann den Magneten des rechten Antriebes genutzt und dann hat der linke Antrieb funktioniert. Jedoch hat dieser mittlerweile auch das selbe Problem, weswegen ich von einem veränderten Magnetfeld ausgehe. Dieses wollte ich mittels der Aufzeichnung am Oszilloskop kontrollieren.
Hannes D. schrieb: > Kann es am fehlenden RL liegen? Falls du damit R1 im Datenblatt meint, ja. Ein Open Kollektor-/Drain-Ausgang kann keine Spannung liefern.
Wolfgang schrieb: > Ein Open Kollektor-/Drain-Ausgang kann keine Spannung liefern. Das stimmt schon, trotzdem müsste dann auf dem Oszillogramm oben zeitweise eine saubere Nulllinie zwischendurch zu sehen sein. Ein ordentliches 'High' kann ohne Pullup nicht kommen, aber die Brummeinstreuungen müssen in der aktiven Phase wenigstens weg sein.
HildeK schrieb: > Das stimmt schon, trotzdem müsste dann auf dem Oszillogramm oben > zeitweise eine saubere Nulllinie zwischendurch zu sehen sein. Bei 5mV/div und ein bisschen Kabelei muss IMHO gar nichts mehr sauber sein ;-)
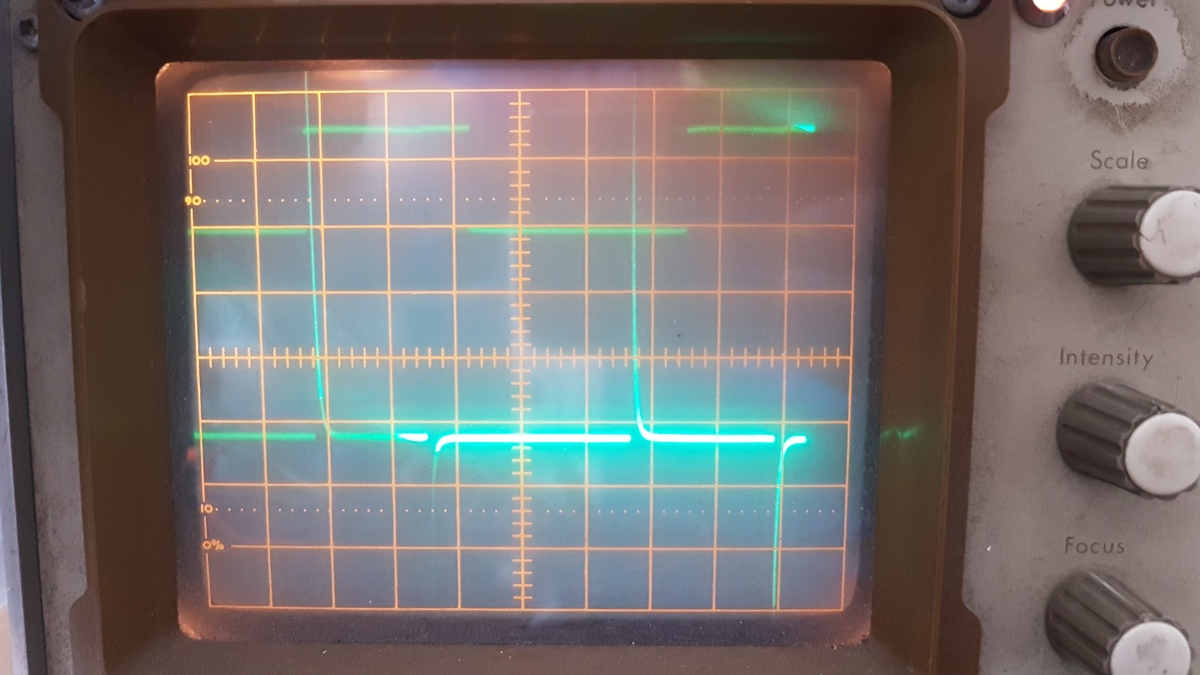
Ich habe jetzt ein Vernünftiges Signal mit 6V DC als Input aufgenommen. Wenn ich den Motor jetzt extern Versorge und das Signal vom Hall Sensor auslese sieht man im Video, dass die Signale nicht gleichförmig lang sind somit auch das Triggern nicht vernünftig möglich war. Dies würde meinen Verdacht, dass die Magneten einen Fehler haben bestätigen. Was würdet ihr dazu sagen?
Hannes D. schrieb: > 20180624_143549.mp4 (9,82 MB, 20 Downloads) > 20180624_143838.mp4 (6,62 MB, 14 Downloads) Muss man wirklich jeden Kram als "Katzenvideo" in der Welt verbreiten. Stell den Trigger vom Oszi vernünftig ein, mache einen aussagekräftigen Screenshot und gut ist.
Wolfgang schrieb: > Bei 5mV/div und ein bisschen Kabelei muss IMHO gar nichts mehr sauber > sein ;-) Den Unterschied würde man trotzdem sehen.
Angehängte Dateien:
-

20180624_153136.jpg
240 KB
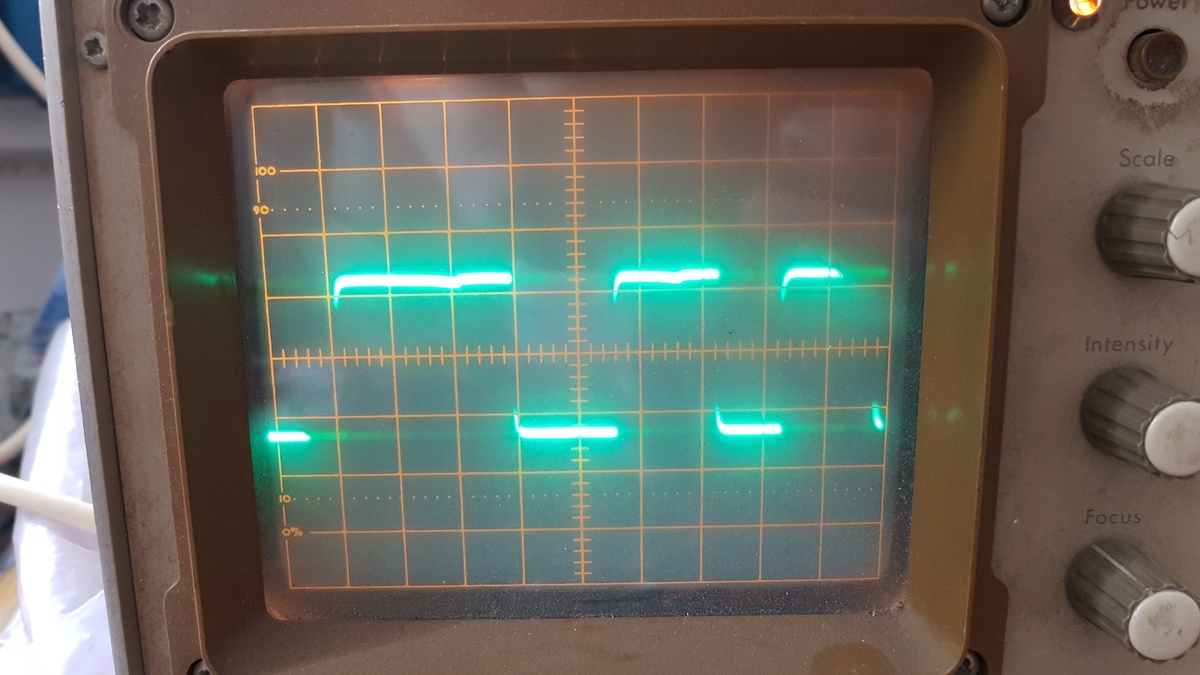
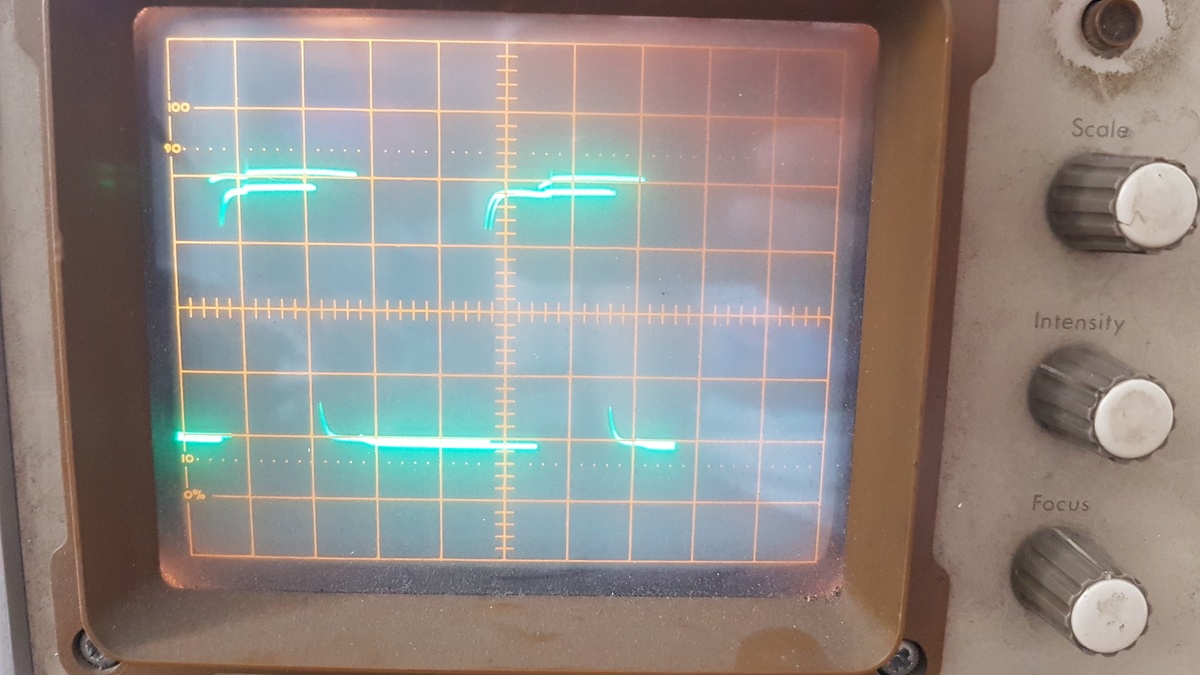
Forist schrieb: > Hannes D. schrieb: >> 20180624_143549.mp4 (9,82 MB, 20 Downloads) >> 20180624_143838.mp4 (6,62 MB, 14 Downloads) > > Muss man wirklich jeden Kram als "Katzenvideo" in der Welt verbreiten. > > Stell den Trigger vom Oszi vernünftig ein, mache einen aussagekräftigen > Screenshot und gut ist. Ich habe beabsichtigt diesmal kein Foto hochgeladen, da das Signal, wie zuvor schon erwähnt nicht besser zu triggern geht bei der gewählten Zeit. Die Signallänge ist nicht immer gleich weshalb auch das Signal hüpft. Ich habe es soeben noch einmal probiert, aber mehr konnte ich aus dem sehr alten Oszilloskop nicht herausholen. Ein hochmodernes Oszi, welches dir anscheinend zur verfügung steht habe ich leider nicht. Ich denke im Video sieht man schon die verschiedenen Signallängen schön. Dies folgt meiner Meinung nach aus den unterschiedlich langen Magnetfeldern. Anbei noch ein Foto, vom Signalverlauf. Man sieht, das erste Signal ist drei Dekaden Lang somit 6ms und die folgenden zwei nur über zwei Dekaden als 4ms.
Liege ich recht in der Annahme, das diese Zeitlichen Differenzen vom Encoder Magneten kommen?
Da liegst ziemlich daneben mit Deiner Vermutung. Der (permanent)-Magnet ist auch in seinem zeitlichen Verlauf permanent und liefert bestimmt keine unterschiedliche Impulszeiten. Aber vielleicht übst Du mal ein wenig mit Deinem Scope? Triggerschwelle... Zeitbasis, Syncr. usw. ? Evt mit einer anderen, bekannten Signalquelle oder so?
Beitrag #5467916 wurde von einem Moderator gelöscht.
Bernd schrieb: > Da liegst ziemlich daneben mit Deiner Vermutung. Der (permanent)-Magnet > ist auch in seinem zeitlichen Verlauf permanent und liefert bestimmt > keine unterschiedliche Impulszeiten. > Aber vielleicht übst Du mal ein wenig mit Deinem Scope? > Triggerschwelle... > Zeitbasis, Syncr. usw. ? Evt mit einer anderen, bekannten Signalquelle > oder so? Permanent Magneten können meines Wissens doch ihre magnetische Wirkung durch zb fallen lassen, oder eine starke externe magnetische Einwirkung verändern. Wodurch können sich dann die unterschiedlichen Impulszeiten ergeben? Diese sollten doch für die Erkennung die gleiche Impuszeit aufweisen. Ich nutze als Signalquelle ein DC Labornetzteil, das verursacht mit seichtheit kein Problem. Sorry, aber ich habe echt jede Funktion des Scopes durchprobiert, jedoch war das Signal nicht zu triggern. Kann auch daran liegend da das alte Skope Nut einen beschränkten Zeitverlauf aufnehmen kann und da siech die Impulslänge ändert muss es zwangsweise springen. Nun zur eigentliche Frage. Das letzte von mir aufgenommene Bild zeigt mir klar, dass unterschiedliche Impulsverläufe von den Hallsensorten anfgenommen wird. Wodurch kann dies sonst, wenn nicht durch die unterschiedlichen Magnetfelder verursacht werden??? Der Testaufbau beinhaltet nur einen Widerstand, Kondensator, Hallsensor und den Magneten. Vielen Dank für eure Hilfe.
Beitrag #5467965 wurde von einem Moderator gelöscht.
Hannes D. schrieb: > Permanent Magneten können meines Wissens doch ihre magnetische Wirkung > durch zb fallen lassen, oder eine starke externe magnetische Einwirkung > verändern. > > Wodurch können sich dann die unterschiedlichen Impulszeiten ergeben? > Diese sollten doch für die Erkennung die gleiche Impuszeit aufweisen. Scheint ja nur minimal zu sein(?). Wenn nicht mehr alle Spulen bestromt werden, könnte das genau so aussehen. Halte ich für wahrscheinlicher, als 1000 Stürze auf einen Amboss. ;)
Welchen Grund könnte es sonst noch haben, dass das Problem verursacht?
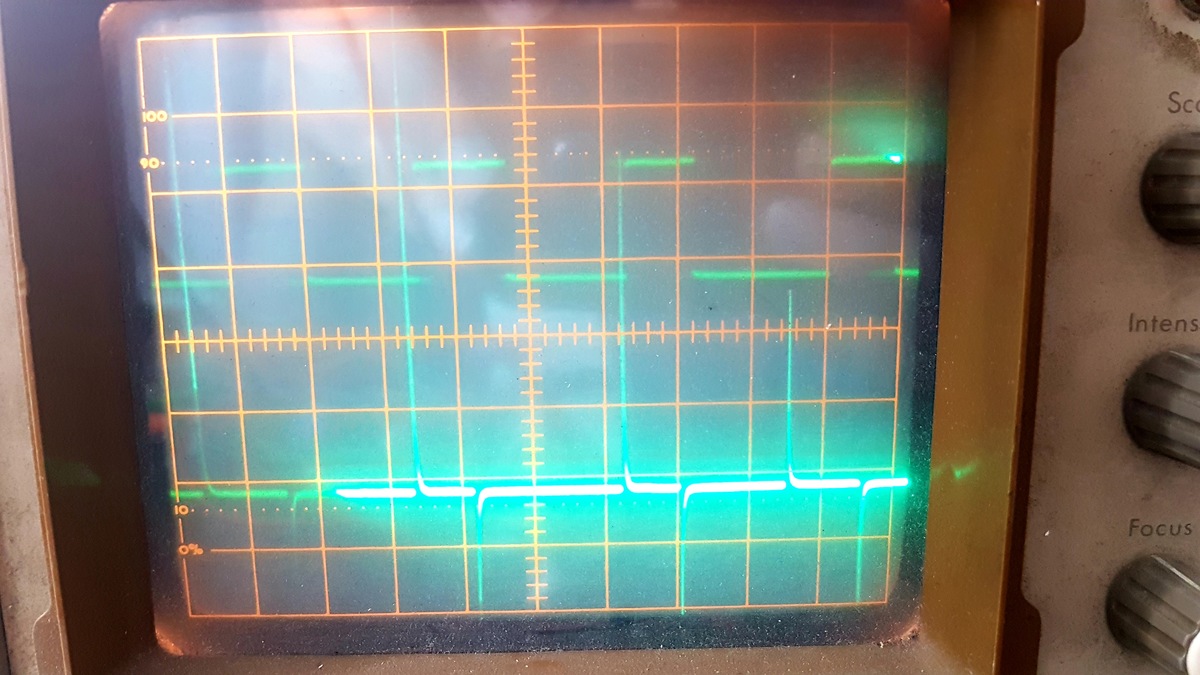
Hannes D. schrieb: > Welchen Grund könnte es sonst noch haben, dass das Problem verursacht? Wie wär's wenn Du den Encoder mal statisch durchprüfst? Kleb auf die Welle eine runde Pappscheibe, dreh das Ding von Hand langsam durch und mach immer einen Strich wenn sich am Ausgang der Pegel ändert. Dann kannst Du mit dem Geodreieck prüfen ob die Polteilung symmetrisch ist, bzw wenn nicht ob das Resultat sinnvoll erscheint. Ein längerer Puls oder Doppelpuls am Anfang der Umdrehung ist nicht unüblich wenn man neben der Relativbewegung auch eine Absolutposition braucht.
Angehängte Dateien:
-

20180627_124346.jpg
240 KB -

20180627_130009.jpg
240 KB

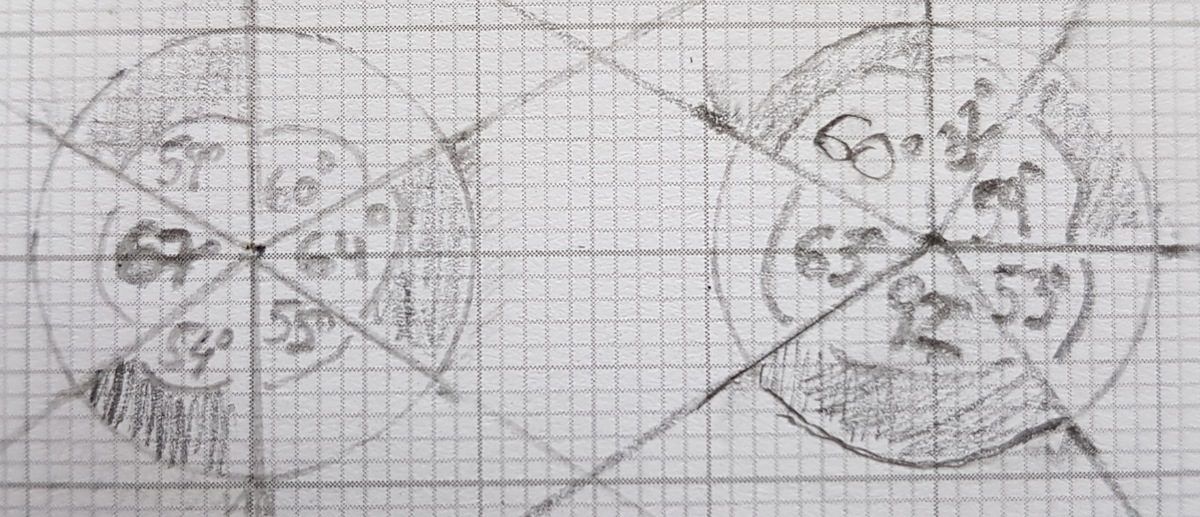
soul e. schrieb: > Hannes D. schrieb: > >> Welchen Grund könnte es sonst noch haben, dass das Problem verursacht? > > Wie wär's wenn Du den Encoder mal statisch durchprüfst? Kleb auf die > Welle eine runde Pappscheibe, dreh das Ding von Hand langsam durch und > mach immer einen Strich wenn sich am Ausgang der Pegel ändert. Dann > kannst Du mit dem Geodreieck prüfen ob die Polteilung symmetrisch ist, > bzw wenn nicht ob das Resultat sinnvoll erscheint. > > Ein längerer Puls oder Doppelpuls am Anfang der Umdrehung ist nicht > unüblich wenn man neben der Relativbewegung auch eine Absolutposition > braucht. Danke für den Tipp. Das wollte ich auch als nächstes messen. Bei den Bilder sieht man meine Ergebnisse. Ein Magnet rechts auf dem Bild hat meiner Meinung nach einen Fehler. Keine der beiden Magneten gibt den exakten Umsprung zwischen dem High und dem Low Pegel an. Diese sollten doch den selben Winkel jeweils aufweisen oder?
Interessant wäre die Signale beider Encoder zu sehen, für eine saubere Auswertung müssen diese Überlappen, d.h. es darf sich immer nur ein Signal ändern(Gray-Code). Ändern sich beide Signale gleichzeitig kommt die Auswertung durcheinander.
Mal eine kurze Zwischenfrage zum Thema, weiß jemand, wo man diese Encoder-Magneten für die Motorwelle einzeln bekommt? Ich kämpfe gerade mit einem Chinamotor mit 22 Polen auf der Encoderscheibe, 2 würden für die Anwendung völlig ausreich.
Welche von den ca. 23122 Bauformen benötigst Du denn für den China- Motor?
Rüdiger schrieb: > Welche von den ca. 23122 Bauformen benötigst Du denn für den China- > Motor? Der aktuelle Magnet hat eine Durchmesser von 13,5mm , Höhe 4mm und Loch für die Welle 2mm Durchmesser. Zwei Pole (Nord und Süd) wären völlig ausreichend, da dahinter noch ein Getriebe mit 500:1 kommt.
Hannes D. schrieb: > Ein Magnet rechts auf dem Bild hat meiner Meinung nach einen Fehler. > Keine der beiden Magneten gibt den exakten Umsprung zwischen dem High > und dem Low Pegel an. > > Diese sollten doch den selben Winkel jeweils aufweisen oder? Der Polteilungfehler ist schon ziemlich gigantisch. Mit sowas als Encoder für's ABS wäre Dein Auto schon zweimal von der Straße geflogen. Für eine einfache Drehzalmessung mag das aber immer noch taugen. Da werden die Impulse über einen längeren Zeitraum aufintegriert, z.B. 360 Takte in 100 ms.
Was auch zu unsymetrischen Impulsen führt ist wenn die Platine nicht mittig auf der Welle sitzt. Das kann leicht passieren, wenn die Motoranschlüsse etwas verbogen sind.
Julian B. schrieb: > Interessant wäre die Signale beider Encoder zu sehen, für eine saubere > Auswertung müssen diese Überlappen, d.h. es darf sich immer nur ein > Signal ändern(Gray-Code). > Ändern sich beide Signale gleichzeitig kommt die Auswertung > durcheinander. Danke. Ich muss schauen, ob ich noch einen zweiten Messkopf habe, dann kann ich beide Hallsensoren gleichzeitig messen. Julian B. schrieb: > Was auch zu unsymetrischen Impulsen führt ist wenn die Platine nicht > mittig auf der Welle sitzt. Das kann leicht passieren, wenn die > Motoranschlüsse etwas verbogen sind. Danke für den Tipp. Das werde ich mit der Schieblehre nachmessen.
Angehängte Dateien:
-

20180629_165029.jpg
210 KB -

20180629_165732.jpg
220 KB
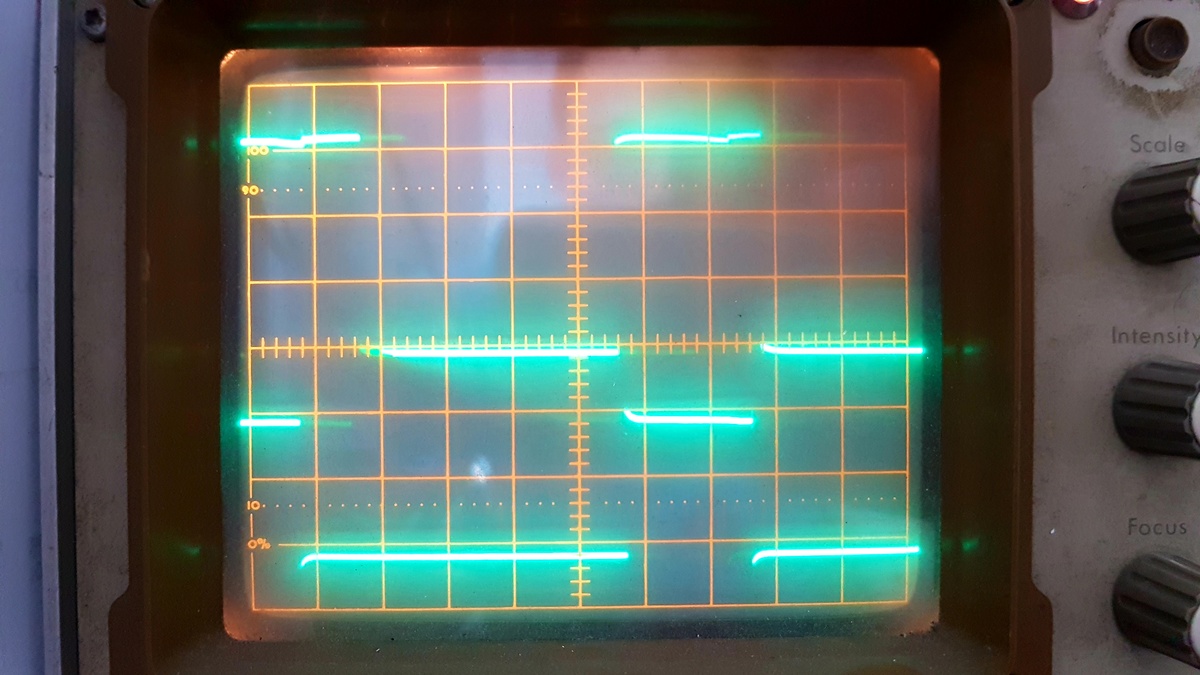
Ich habe jetzt den Original Magneten und einen selbst gebastelten gemessen. Der selbst gebastelten hat komischerweise fast ein durchgehendes High Signal auf einem Hallsensor und auf dem anderen Hallsensor wird das gewünschte pulsige Signal gemessen. Beim originalen Magneten sieht man auch unterschiedliche Signallängen, was mir nicht ganz schlüssig vorkommt, da doch beide Hallsensoren die nur Örtlich versetzt sind genau das selbe Signal nur Zeitversetzt ausgeben sollten. Mit der Schiebelehre habe ich die Hallsensoren ausgemessen und sie haben exakt den selben Abstand zum Mittelpunkt des Motors. Kann mir vielleicht jemand helfen? Ich würde so gerne den Saugroboter wieder nutzen.
Angehängte Dateien:
-

IMG_20180706_103305.jpg
210 KB
Vielleicht hat ein Hallsensor auch eine Macke, kannst du die Bezeichnung lesen? Bei den Encodern die ich in der Hand hatte waren Unipolare Sensoren verbaut die einen Open Drain Ausgang hatten. Wenn diese den Südpol sehen, schalten sie auf Low, beim allem anderen auf High. Aus diesem Grund sind die Low-Flanken meist kürzer. Ich habe mir gerade auch Encoder-Scheiben gelasert und Neodyn Magnete reingeklebt. Dabei habe ich z.B. 2 Magnete mit 180Grad Versatz und den Südpol nach außen, Nordpol nach innen. Hat sehr gut funktioniert. Allerdings überlappen die Impulse nicht richtig, weil die Hallsensoren 90 Grad Versatz haben.
Angehängte Dateien:
-

20171212_125207.jpg
260 KB
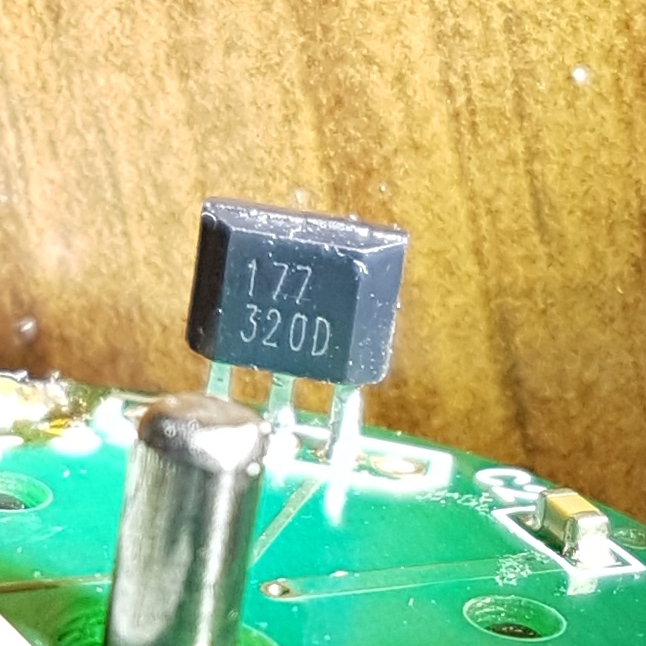
Julian B. schrieb: > Vielleicht hat ein Hallsensor auch eine Macke, kannst du die Bezeichnung > lesen? > Bei den Encodern die ich in der Hand hatte waren Unipolare Sensoren > verbaut die einen Open Drain Ausgang hatten. > Wenn diese den Südpol sehen, schalten sie auf Low, beim allem anderen > auf High. Aus diesem Grund sind die Low-Flanken meist kürzer. > Ich habe mir gerade auch Encoder-Scheiben gelasert und Neodyn Magnete > reingeklebt. Dabei habe ich z.B. 2 Magnete mit 180Grad Versatz und den > Südpol nach außen, Nordpol nach innen. > Hat sehr gut funktioniert. > > Allerdings überlappen die Impulse nicht richtig, weil die Hallsensoren > 90 Grad Versatz haben. Anbei ist ein Foto mit der Bezeichnung des Hallsensores. Ich finde nur komisch, dass das Problem nur bei meinem selbst gebauten Magneten auftritt und nicht beim Originalen.
Hannes D. schrieb: > 20180629_165732.jpg > > Ich habe jetzt den Original Magneten und einen selbst gebastelten > gemessen. Drehe dein Oszi doch einfach mal so hin, dass die beiden Kanäle vernünftig übereinander, i.e. einer oben und einer unten dargestellt werden und von beiden Signalen beide Pegel vernünftig sichtbar sind. Und dann stellst du die Zeitablenkung so ein, dass eine volle Periode drauf passt. Damit der nächste Schrieb wieder phasenrichtig drauf liegt, drehst du dann mal am Trigger-Hold-Off oder änderst die Drehzahl ein bisschen Bernd schrieb: > Aber vielleicht übst Du mal ein wenig mit Deinem Scope? Ack
Hannes D. schrieb: > Ich finde nur komisch, dass das Problem nur bei meinem selbst gebauten > Magneten auftritt und nicht beim Originalen. Vielleicht sind deine Magneten etwas schwächer oder falsch ausgerichtet, sodaß sie nur kurze Low-Impulse erzeugen. Der Hallsensor könnte der sein: http://www.gwtusa.com/ic/PDF/MH-177.pdf
Angehängte Dateien:
-

20180720_144718.jpg
220 KB -

20180720_144347.jpg
200 KB
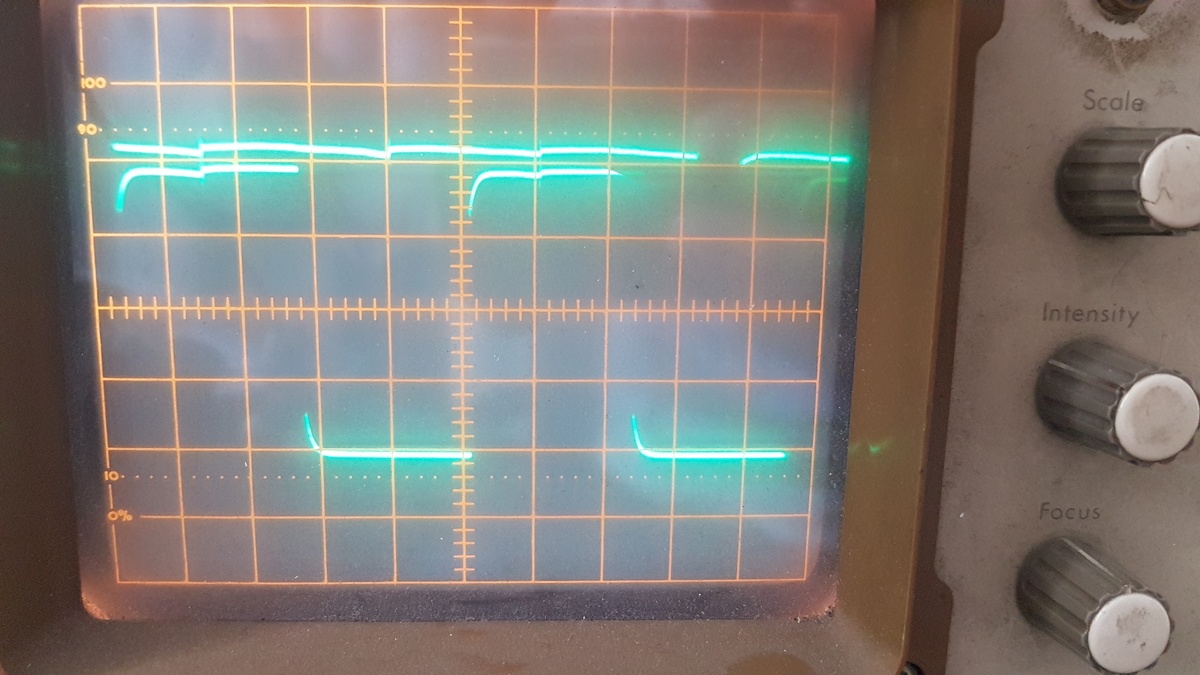
Wolfgang schrieb: > Hannes D. schrieb: >> 20180629_165732.jpg >> >> Ich habe jetzt den Original Magneten und einen selbst gebastelten >> gemessen. > > Drehe dein Oszi doch einfach mal so hin, dass die beiden Kanäle > vernünftig übereinander, i.e. einer oben und einer unten dargestellt > werden und von beiden Signalen beide Pegel vernünftig sichtbar sind. > > Und dann stellst du die Zeitablenkung so ein, dass eine volle Periode > drauf passt. Damit der nächste Schrieb wieder phasenrichtig drauf liegt, > drehst du dann mal am Trigger-Hold-Off oder änderst die Drehzahl ein > bisschen Ich habe die Signale jetzt übereinander angeordnet und auch die Eingangsspannung variiert. Dies führt jedoch nur dazu, dass das selbe Signal einen kürzeren Zeitverlauf und eine höhere Amplitude aufweist. Das untere Signal scheint mir doch sehr komisch. Kann es wirklich sein, dass der Hallsensor defekt ist?
Angehängte Dateien:
-

20180720_151202.jpg
210 KB -

20180720_151224.jpg
240 KB
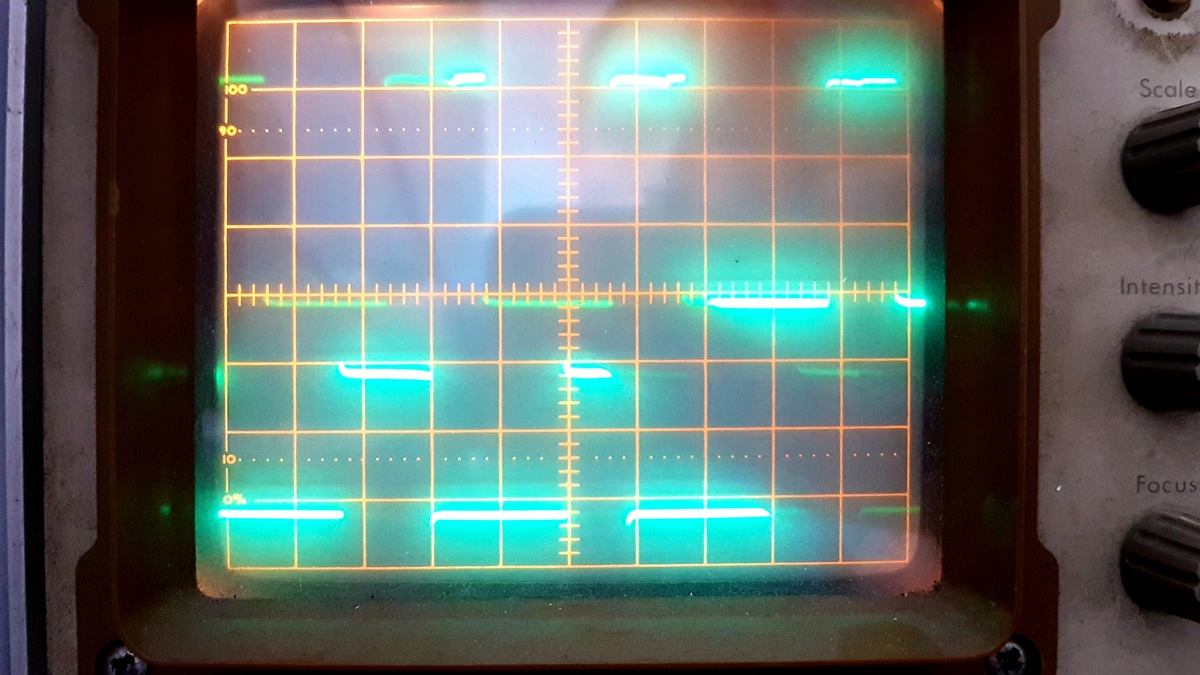
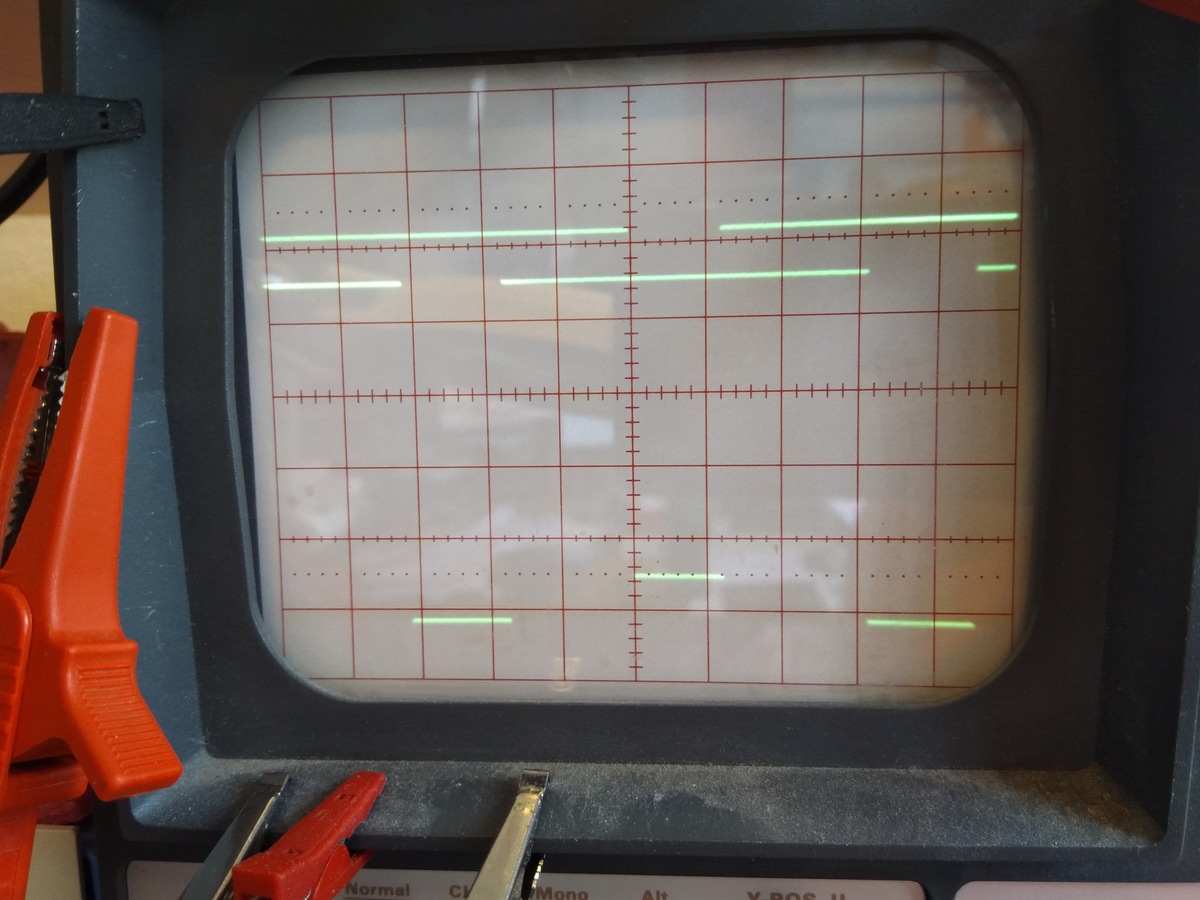
Edit: Die Fotos zuvor wurden mit 5mV/Dekade aufgenommen. Wenn ich die Einstellung auf 2mV/Dekade ändere erhalte ich vernünftige Signale.
Hannes D. schrieb: > Edit: Die Fotos zuvor wurden mit 5mV/Dekade aufgenommen. Wenn ich die > Einstellung auf 2mV/Dekade ändere erhalte ich vernünftige Signale. Die Ausgangssignale sollten sich zwischen 0 und VCC der Hallsensoren bewegen, deswegen verstehe ich nicht, warum du in einem Messbereich 2mV misst, hast du wirklich Pullups eingebaut?
Julinho schrieb: > Hannes D. schrieb: >> Edit: Die Fotos zuvor wurden mit 5mV/Dekade aufgenommen. Wenn ich die >> Einstellung auf 2mV/Dekade ändere erhalte ich vernünftige Signale. > > Die Ausgangssignale sollten sich zwischen 0 und VCC der Hallsensoren > bewegen, deswegen verstehe ich nicht, warum du in einem Messbereich 2mV > misst, hast du wirklich Pullups eingebaut? Sorry mein Fehler. Ich habe noch einmal nachgesehen. Der Regler war etwas dreckig. Es sind 2V/Dekade in meinem Zweiten Beitrag. Ja ich habe Pullups eingebaut
Angehängte Dateien:
-

hall.jpg
200 KB
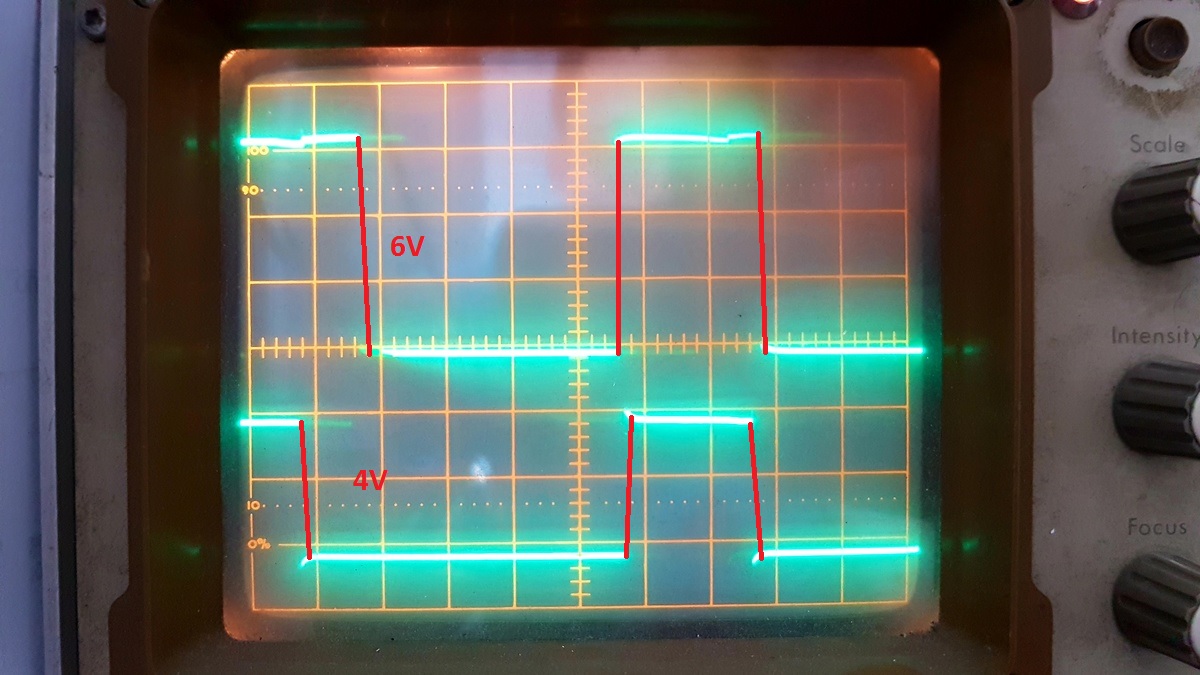
wenn du 2V pro Kästchen hast, dann hat ein Signal 6V und das andere 4V, kann das stimmen?
Julinho schrieb: > wenn du 2V pro Kästchen hast, dann hat ein Signal 6V und das andere 4V, > kann das stimmen? Ja, 6 oder 7V waren eingestellt. Der Motor und beide Hallsensoren werden über dieselbe Eingangsquelle versorgt. Die Pullup Widerstände betragen 2,4kOhm
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.