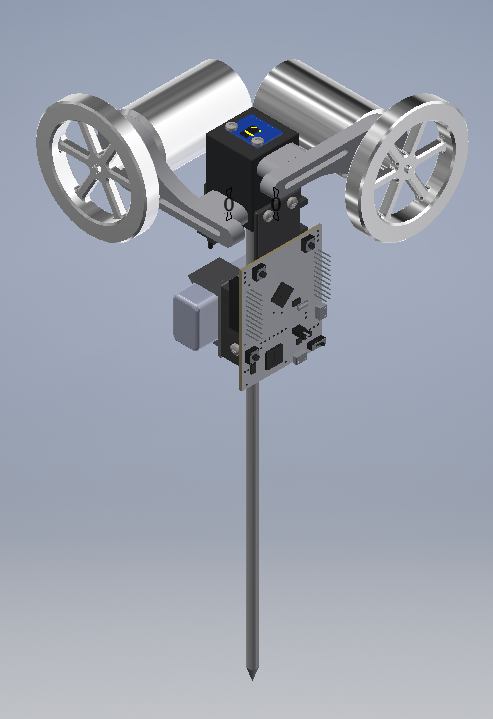
Hallo liebes Forum, mein Hobbyprojekt, eine Art inverses Pendel, ist nahezu fertig. Die Regler (wobei nur einer für das eigentliche balancieren verantwortlich ist) habe ich durch langes probieren eingestellt. Das balancieren funktioniert auch mehr oder weniger zufriedenstellen (momentan erst eine Achse in Betrieb), allerdings ist das Störverhalten grottenschlecht.. Meine Überlegung war daher den Regler mit "professionelleren" Methoden auszulegen. Methode 1: Mathematisches Modell -> scheitert leider, da sich im System mir unbekannte Motorregler befinden und ich somit die Strecke zwischen Motorreglereingang bis Motorausgang nicht kenne. Methode 2: Sprungantwort und Ziegler-Nichols. Das Ergebnis sollte somit zumindest etwas besser werden. Mein Problem hierbei ist, dass ich keine Ahnung habe wie bei einem inversen Pendel die Sprungantwort aufgenommen werden muss. "Nach unten hängen lassen und 100% auf den Motor" funktioniert leider nicht, da es eine Art balancierender Stab ist. Das Bild ist alt aber verdeutlicht mein Vorhaben :-) Für gute Vorschläge wäre ich sehr dankbar. :-) Grüsse, MiMa
Angehängte Dateien:
-

223033834_48011.jpg
27 KB
Wir haben das damals mit FUZZY logic gemacht :-)
Beitrag #5475811 wurde von einem Moderator gelöscht.
Random .. schrieb: > Wir haben das damals mit FUZZY logic gemacht :-) Aber dann habe ich doch wieder diese "Probierwerte" oder? Es sind sehr hochwertige Komponenten verbaut und mein Bauchgefühl sagt mir, dass da noch sehr viel Verbesserungspotenzial in meinem Regler steckt :-) Ich wage zu bezweifeln, dass mir ein erneutes "probieren" viel Verbesserung bringt Dustin L. schrieb im Beitrag #5475811: > Willst du das nicht-lineare System regeln oder nur um den Arbeitspunkt > Phi = 180° herum, also das linerarisierte Modell? Nunja, die Motorleistung genügt ca. um das Pendel bei +-4° um den oberen Totpunkt zu stabilisieren. Somit sollte ein linearisierter Regler genügen oder? Wenn sich aber Vorteile durch ein nichtlineares Modell ergeben, dann immer her damit :-)
https://www.youtube.com/watch?v=6WWqo-Yr8lA&t=8s Wenn man an den Motorachsen Schwungräder mit entsprechenden Massenträgheitsmomenten oder höhere Motordrehzahlen anwendet und das ganze um 90 Grad verdreht auf den Kopf stellt, könnte man evtl. die hier gezeigten Komponenten dafür verwenden?
Bei einem "Normalen" Regler nimmt man einen PD Regler mit D nur in der Rückführung. Sind also 2 Potis. Da hat man schneller dran gedreht als modelliert.
Ralf L. schrieb: > Youtube-Video "Another Arduino project - Your Arduino Balancing > Robot (YABR) - Part 1" > > Wenn man an den Motorachsen Schwungräder mit entsprechenden > Massenträgheitsmomenten oder höhere Motordrehzahlen anwendet und das > ganze um 90 Grad verdreht auf den Kopf stellt, könnte man evtl. die hier > gezeigten Komponenten dafür verwenden? Ich habe ja schon einen funktionierenden und sehr hochwertigen Aufbau. Mir fehlt nur eine GUTE Regelung :-)
Lifehacker schrieb: > Bei einem "Normalen" Regler nimmt man einen PD Regler mit D nur in > der > Rückführung. Sind also 2 Potis. > Da hat man schneller dran gedreht als modelliert. Die Regelung von diesem System lässt sich in keiner Weise mit der von einem Balance-Robot vergleichen. Und einen "Probier-Regler" habe ich ja bereits - allerdings mit sehr schlechter Reaktion auf Störungen von außen. Deshalb will ich ja einen besseren Regler
MiMa schrieb: > Mein Problem hierbei ist, dass ich keine Ahnung habe > wie bei einem inversen Pendel die Sprungantwort > aufgenommen werden muss. Nun ja, Du befestigst das inverse Pendel (in Betriebslage) nicht an einem ortsfesten Punkt, sondern auf einem kleinen Schlitten, der zwischen zwei Anschlägen definiert verschoben werden kann. Und dann verschiebst Du den Schlitten halt sprungartig.
Angehängte Dateien:
-

Balancing_Stick.png
59 KB -

Strom-Zeitdiagramm.png
39 KB

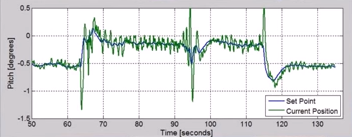
Bei diesem Balancing Stick wird im Video noch ein Strom-Zeitdiagramm gezeigt. Man kann erahnen, dass es sich um einen PD-Regler handelt. https://www.youtube.com/watch?v=woCdjbsjbPg
Possetitjel schrieb: > Nun ja, Du befestigst das inverse Pendel (in Betriebslage) > nicht an einem ortsfesten Punkt, sondern auf einem kleinen > Schlitten, der zwischen zwei Anschlägen definiert verschoben > werden kann. > Und dann verschiebst Du den Schlitten halt sprungartig. Es ist nur eine Art inverses Pendel. Hast du dir mein Bild angesehen? :-) Ralf L. schrieb: > Bei diesem Balancing Stick wird im Video noch ein Strom-Zeitdiagramm > gezeigt. Man kann erahnen, dass es sich um einen PD-Regler handelt. Dieses Video ist der Ursprung von meinem Projekt. Habe vor längerem mit den Entwicklern Kontakt aufgenommen und sie sagen selber, dass sie einen Zustandsregler verwenden und über 1 Jahr zum einstellen benötigt haben.
MiMa schrieb: > Habe vor längerem mit > den Entwicklern Kontakt aufgenommen und sie sagen selber, dass sie einen > Zustandsregler verwenden und über 1 Jahr zum einstellen benötigt haben. Also doch probieren mit Suchstrategie: Bau einen Möglichkeit ein, um den Regler definiert zu stören, lass deine Mimik die Regelgüte messen und dann lass sie an den Parameter drehen. Algorithmen für nichtlineare Optimierung wurden doch schon erfunden. Wenn das alles automatisiert abläuft, braucht man bestimmt kein Jahr dafür.
Wolfgang schrieb: > Also doch probieren mit Suchstrategie: > Bau einen Möglichkeit ein, um den Regler definiert zu stören, lass deine > Mimik die Regelgüte messen und dann lass sie an den Parameter drehen. > Algorithmen für nichtlineare Optimierung wurden doch schon erfunden. > > Wenn das alles automatisiert abläuft, braucht man bestimmt kein Jahr > dafür. Interessanter Ansatz. Die Umsetzung wäre auch nicht allzu schwierig - wenn auch aufwendig. Meine Angst hierbei ist allerdings, dass es mehrere Parameterkombinationen gibt welche stabil sind, aber keine "durchgehende Verbindung" dazwischen. Somit würde ich nie die optimale Stelle finden. Kommt das Ergebnis allerdings überhaupt in die Nähe von einem berechneten Regler?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.