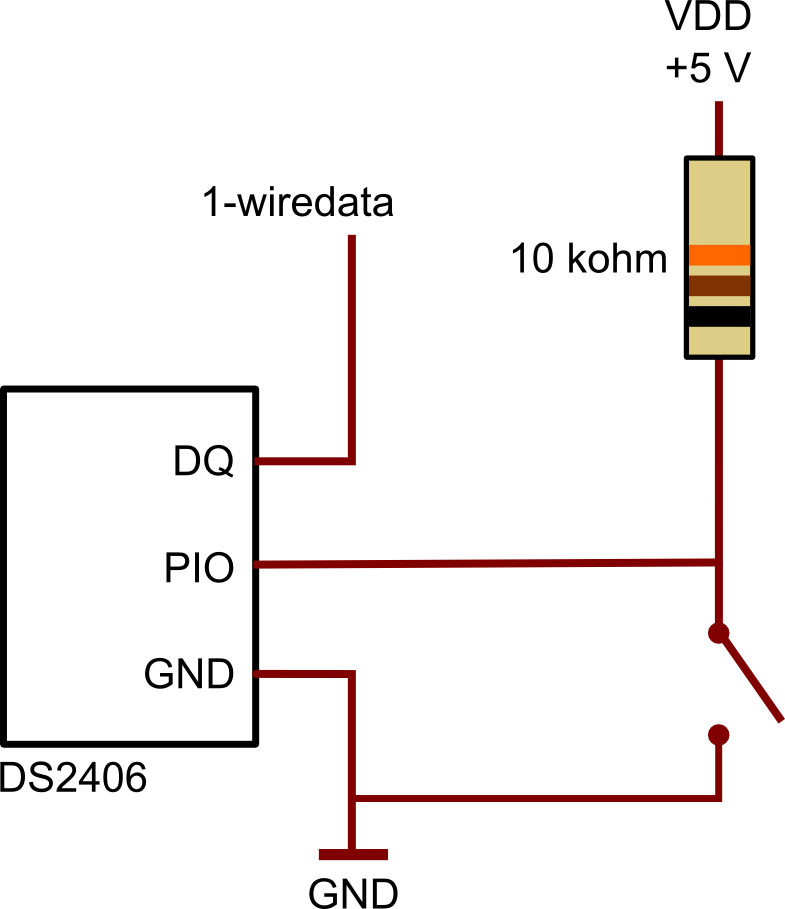
Hallo zusammen . Ich würde gerne auf meinen Rennkart ein Telemetriesystem einbauen . Ja ja ich weis gibt es fertig zu kaufen. Will ich aber nicht. Plan : Arduino plus SD card zum loggen und 1 wire bus für die Sensoren wie tempfühler Geschwindigkeit Drehzahl/IR für reifentemp./uws Später dann 1Sheeld (https://1sheeld.com ) für Arduino um mein Smartphone als Display zu verwenden. Für Drehzahl und Geschwindigkeit wären Hallensenoren optimal. Wäre es möglich eine Standard Hallsensor mit einen DS 2406 zu kombinieren ( siehe Bild, quasi statt den eingezeichneten Schalter den Hallsensor einsetzen) und so auf den 1 wire bus zu kommen. LG wranox
Angehängte Dateien:
-

DS2406-Ing_ng.png
28 KB
>Hallenser für 1 wire bus Wieviele Hallenser hast Du denn dazu befragt und vor Allem: auf welcher Strecke soll denn der 1-Wire Bus eingesetzt werden? Ich würde ihn als Ersatz für die Straßenbahnlinie 5 vorschlagen. Dann könnte man vvom Markt bis nach Buna platzsparend vorankommen. https://www.havag.com/fahrplan/liniennetz-und-tarifzonenplan
Wraneschitz A. schrieb: > Wäre es möglich eine Standard Hallsensor mit einen DS 2406 zu > kombinieren > ( siehe Bild, quasi statt den eingezeichneten Schalter den Hallsensor > einsetzen) und so auf den 1 wire bus zu kommen. Wie "schnell" sind denn die Signale vom Hallsensor und wie schnell die Übertragung auf dem Bus? Passt das zusammen?
1-Wire bzw. One-Wire oder Eindraht-Bus beschreibt eine serielle Schnittstelle der Firma Dallas Semiconductor Corp., die mit einer Datenader (DQ) auskommt, die sowohl als Stromversorgung als auch als Sende- und Empfangsleitung genutzt wird. Der Begriff 1-Wire ist irreführend, weil zudem noch eine Masse-Verbindung (GND) erforderlich ist. Da der 1-Wire-Bus im Gegensatz zu vielen anderen Bussystemen keine separate Leitung für das Taktsignal besitzt, muss ein vorgegebenes Timing eingehalten werden. Die Synchronisation erfolgt bei jedem Bit mit der vom Master erzeugten fallenden Flanke. Um eine logische 1 zu schreiben, wird der Bus vom Master für 1 bis 15 μs auf Low-Pegel gezogen, bei einer logischen 0 für 60 bis 120 μs. Zum Lesen zieht der Master wie beim „Write 1“ Signal den Bus für 1 bis 15 μs auf Low-Pegel und der Slave hält für die Übertragung einer logischen 0 den Bus darüber hinaus auf Low. Für einen Reset sendet der Master ein Low-Pegel mit einer Dauer von 480 μs. Ein Slave zeigt seine Anwesenheit an, indem er innerhalb von 60 μs danach den Bus für mindestens 60 μs auf Low zieht. Die 1-Wire-Geräte besitzen zusätzlich noch einen Overdrive-Modus, der es ermöglicht, weitaus höhere Übertragungsraten zu erzielen. Um im Overdrive-Modus eine logische 1 zu erzeugen, muss nur noch lediglich für 1–2 μs ein Low-Pegel anliegen, für eine logische 0 sind im Overdrive-Modus schon 6μs ausreichend. Um einen Reset zu erzeugen, reichen schon 48 μs aus. Ist das Reset-Signal länger als 80 μs, so gehen die 1-Wire-Geräte in den regulären Betriebsmodus, ansonsten bleiben sie im Overdrive-Modus. Im regulären Betriebsmodus sind durch die oben aufgeführten Timingbedingungen Datenraten von bis zu 16,3 KBit/s möglich. Der Overdrive-Modus beschleunigt dies auf bis zu 142 KBit/s.
Hallsensorgeschwindikeit für Speed 11" reifen= 26,95mm Durchmesser 26,95x3,14=84,62mm Umfang = 0,8462 m V Mav 160kmh = 160000m/h 160000:60 = 2666,6 meter/min 2666,6x0,8462= 2256,5 2256,5:60= 37,6 U/sek Also knapp 38 pulse pro sek. Drehzahl motor RPM MAX 13500 U/min 13500:60= 225 u/sek Also 225 pulse pro sek.
Wraneschitz A. schrieb: > Im regulären Betriebsmodus sind durch die oben aufgeführten > Timingbedingungen Datenraten von bis zu 16,3 KBit/s möglich Und wie lange dauert es damit, bis ein Eingangswert übertragen ist? Wraneschitz A. schrieb: > Also 225 pulse pro sek. Und wie ist das Tastverhältnis?
Wraneschitz A. schrieb: > Im regulären Betriebsmodus sind durch die oben aufgeführten > Timingbedingungen Datenraten von bis zu 16,3 KBit/s möglich. Der > Overdrive-Modus beschleunigt dies auf bis zu 142 KBit/s. Wraneschitz A. schrieb: > 13500:60= 225 u/sek > > Also 225 pulse pro sek. Soweit ich das sehen kann, wird das aber schon etwas eng mit der Datenübertragung bei 16,3 KBit/s (im Datenblatt des DS2406 steht übrigens 15,4 KBit/s drinnen)... Du müsstest zum Abfragen des Sensors folgende Daten senden: - 8 Bytes: 64-Bit Adresse des 1-Wire-Bausteins - 1 Byte : Eines der ROM-Kommandos - 1 Byte : Status Lesebefehl - 2 Bytes: Addressierung des Memory - 1 Byte : Rückantwort Statusregister 7 (enthält wohl den Status der Pins) - 2 Bytes: Rückantwort CRC-Info => 15 Bytes Gesamt, macht 120 Bits insgesamt Bei den 15,4 KBit/s wird damit 15400 / 120 = 128,3 Abfragen pro Sekunde Wird für die 225 Pulse pro Sekunde etwas wenig sein. Und Die 1-Wire-Geräte benötigen auch etwas Zeit um den internen Kondensator wieder aufzuladen. Daher wirden wohl deutlich weniger Abfragen pro Sekunde möglich sein. Wenn du schon einen Arduino verbaust, was spricht denn dagegen, die Taktsignale direkt mit einem der Portpins abzufragen? Die Leitungslänge sollte sich ja in Grenzen halten und mehr Kabel zum Sensor müssen auch nicht gelegt werden.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.