Ich möchte einen kleinen CAN-Adapter fürs Auto bauen, der, wenn er Betriebsspannung erhält, einfach nur eine einzige ID aussendet. Also quasi Digital zu CAN ;-) Da dachte ich jetzt an einen PIC oder kleinen AVR (Attiny45) in Kombi mit MCP2515 und MCP2551 oder TJA1050 Transceiver. Da das ganze möglichst klein sein soll wär meine Frage an Euch, ob es noch bessere Chips für eine solch triviale Aufgabe gibt? Das ganze soll so klein und günstig wie möglich werden. Danke schonmal für die Anregungen :-)
Olli Z. schrieb: > Ich möchte einen kleinen CAN-Adapter fürs Auto bauen, der, wenn er > Betriebsspannung erhält, einfach nur eine einzige ID aussendet. Also > quasi Digital zu CAN ;-) Wie "einfach nur eine einzige ID aussendet" ? Einmal ? Zweimal ? Alle xx sec. ? Auf Anfrage ?
Olli Z. schrieb: > Da das ganze möglichst klein sein soll wär meine Frage an Euch, ob es > noch bessere Chips für eine solch triviale Aufgabe gibt? Schon bei den von dir genannten Chips gibt es erhebliche Unterschiede in der Platinenfläche, alleine beim MCP2515 je nach Bauform einen Faktor 4,3 - es kommt drauf an, was du löten möchtest.
wenn es ein AVR sein soll nimm wenigstens einen mit integriertem can controller. tranceiver dran und fertig.
Marc V. schrieb: > Wie "einfach nur eine einzige ID aussendet" ? > Einmal ? > Zweimal ? > Alle xx sec. ? > Auf Anfrage ? Das spielt alles keine Rolle, aber es ist periodisch (alle 200ms). Im prinzip müsste das sogar mit einfachem Bitbangig gehen, aber um keine unnötigen Resends und Kollisionen zu produzieren wäre ein echter CAN-Controller schon gut.
TestX schrieb: > wenn es ein AVR sein soll nimm wenigstens einen mit integriertem can > controller. tranceiver dran und fertig. Da dachte ich an einen AT90CAN (gibts da überhaupt noch andere AVRs mit integriertem CAN-Controller?) Aber der ist relativ groß und braucht einiges an Beschaltung drumherum. Da ist so ein Attiny25/45 selbst mit MCP2515 nicht viel größer, aber viel billiger...
www.nxp.com/products/processors-and-microcontrollers/arm-based-processor s-and-mcus/lpc-cortex-m-mcus/lpc1100-cortex-m0-plus-m0/scalable-entry-le vel-32-bit-microcontroller-mcu-based-on-arm-cortex-m0-plus-m0-cores:LPC1 1C22FBD48
Dann eben ein PIC18F2xK80? (x= 5oder6) <edit>der 25k83 ist neuer und scheint auch billiger zu sein. Kostet gerade so viel, wie ein 2515</edit>
Schau dir mal ATmega16M1 an, wenn es auch Cortex-M sein darf gibt es den ATSAMC21. Haben beide 32 Pins.
Für die braucht man einen Transceiver. 2 ICs brauchst Du anscheinend immer. Der MCP 25625 hat den Tranceiver schon drin. Als QFN ca. 6x6mm2 Zusammen mit eine Tiny könnte das die kleinste Lösung sein
Olli Z. schrieb: >> Alle xx sec. ? >> Auf Anfrage ? > > Das spielt alles keine Rolle, aber es ist periodisch (alle 200ms). Natürlich spielt das eine Rolle. Auf Anfrage bedeutet, dass der Chip imstande sein muss, CAN-Messages zu empfangen und zu dekodieren. Alle xx sec. bedeutet, dass die Meldung ganz einfach rausgeschickt wird. > Im prinzip müsste das sogar mit einfachem Bitbangig gehen, aber um keine > unnötigen Resends und Kollisionen zu produzieren wäre ein echter > CAN-Controller schon gut. Kollision ist auch bei Bitbanging ganz leicht festzustellen. Und Resends bedeutet Bestätigung. Wer soll wem da was bestätigen ? Weißt du überhaupt was du willst und wovon du redest ?
Hi, wie klein muss es den sein? Frührer hatte ich immer eine Kombination aus 7805, Tiny13, MCP2515 und MCP2551 benutzt um den Video Eingang beim MB Command freizuschalten. Musste alle 500 ms eine Can Nachricht senden. Alle Bauteile in THT. Platine war glaube ich 50 x 35 mm und schnell per Hand bestückt. Gruß Rene
Kleiner und einfacher als der LPC11C22FBD48 wird's wohl kaum; Mikrocontroller, CAN-Controller und Transceiver in einem LQFP48-Gehäuse.
Rene Z. schrieb: > 7805, Tiny13, MCP2515 und MCP2551 benutzt um den Video Eingang beim MB > Command freizuschalten. Musste alle 500 ms eine Can Nachricht senden. > Alle Bauteile in THT. Platine war glaube ich 50 x 35 mm und schnell per Hand bestückt. Klingt interessant. Ausser den 7805 würde ich durch einen Lowdrop Regler ersetzen, da ich keine Heizung brauche und mit Drossel und Transil-Diode schützen. Ich hätte zum testen einen Attiny85 und ein solches CAN Shield hier.
Angehängte Dateien:
-

Can_001.png
19 KB
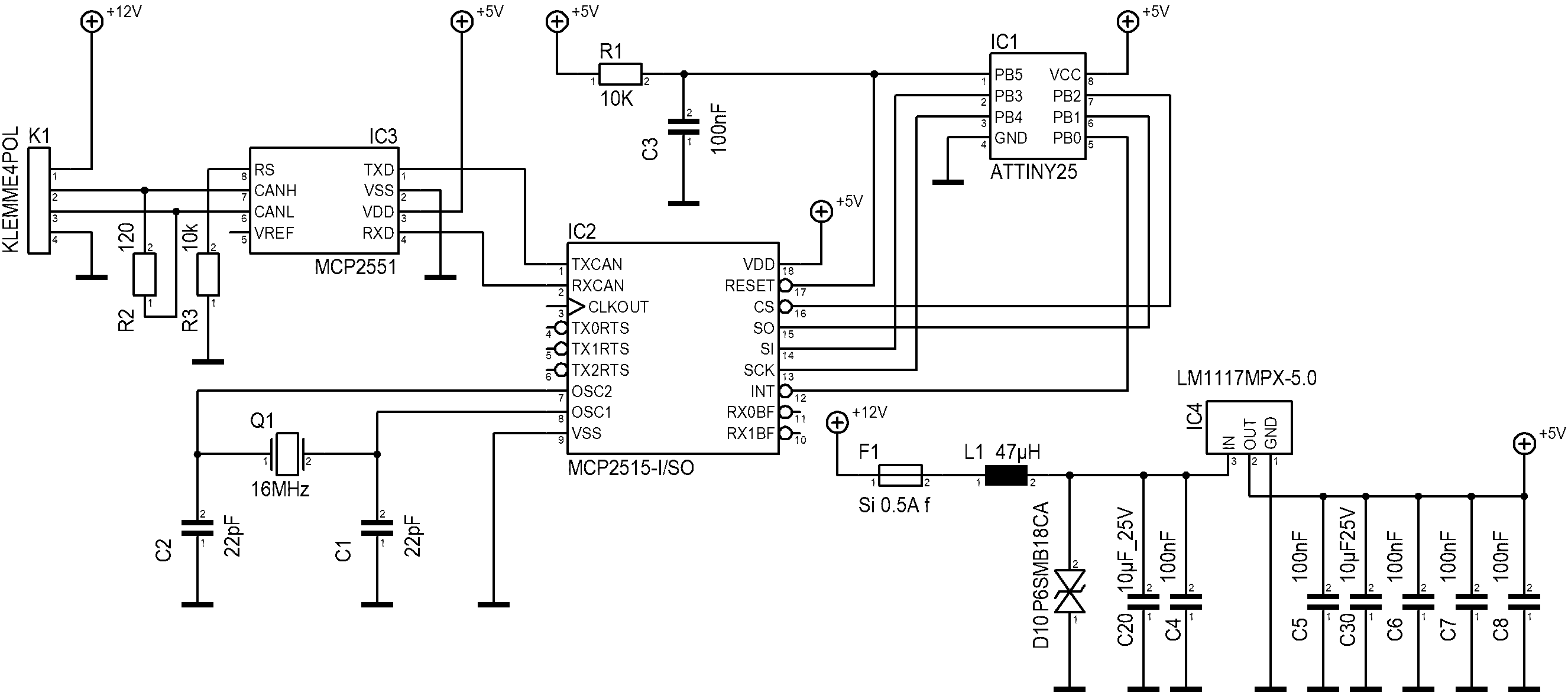
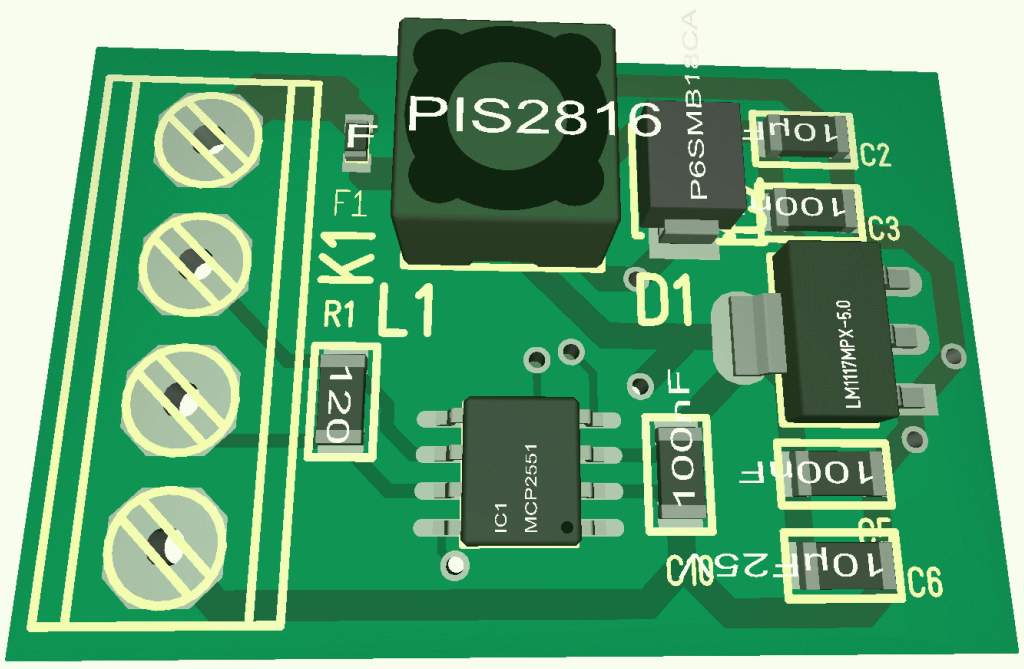
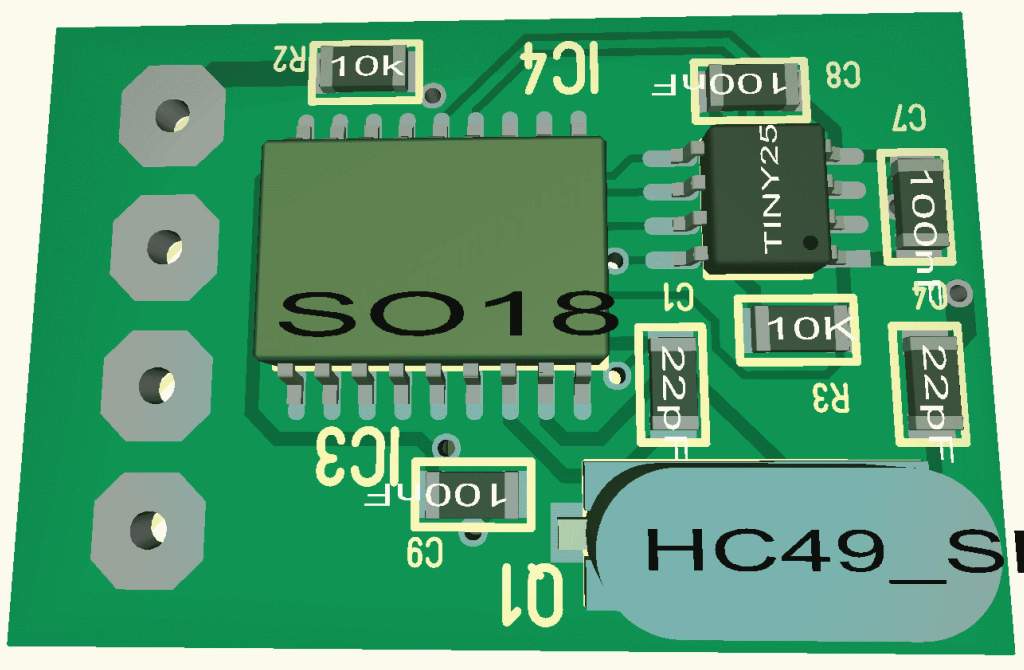
Hi, klar heute kann man da einiges ändern. Bei mir ist das locker 10 Jahre her. Habe damals geschaut was leicht aufzutreiben war. Anbei mal ein Denkanstoß. Ist noch Verbesserungswürdig aber so ähnlich kann es wohl aussehen. Gruß Rene
Olli Z. schrieb: > Klingt interessant. Ausser den 7805 würde ich durch einen Lowdrop Regler > ersetzen, da ich keine Heizung brauche Hast Du in Deinem Auto eine Spannung < 12V? Ein LDO kann mit einer niedrigeren Spannungsdifferenz zwischen Eingang und Ausgang (dem "Drop") auskommen. Wenn Du ihm aber eine höhere Spannungsdifferenz gibst (wie 12V auf 5V) dann ist der LDO aber nicht effizienter oder heizt weniger als ein klassischer Spannungsregler wie der 7805. Effizienter wird es erst wenn Du einen Schaltregler nimmst. Da aber so eine CAN-Schaltung typischerweise sehr wenig Strom verbrauchen wird, brauchst Du einen Schaltregler der auch bei Stromaufnahme im einstelligen mA-Bereich noch effizient ist. Die gibt es, muss man aber extra danach suchen.
Dr. Sommer schrieb: > Kleiner und einfacher als der LPC11C22FBD48 wird's wohl kaum; > Mikrocontroller, CAN-Controller und Transceiver in einem LQFP48-Gehäuse. Kommt drauf an. Ein stm32 o.ä im qfn32 hat 5x5 mm, dazu ein transceiver im qfn8 mit 2x3 oder 3x3 mm ist flächenmäßig schon Mal im Vorteil. Spannungsversorgung für den lpc ist auch 3.3 V und 5 V. Je nach Anforderung wäre auch hier ein 5V Controller oder ein 3.3V transceiver zu überlegen.
Rene Z. schrieb: > Habe damals geschaut was leicht aufzutreiben war. Anbei mal ein > Denkanstoß. > Ist noch Verbesserungswürdig aber so ähnlich kann es wohl aussehen. Witzig, fast genauso hab ich hier gerade einen Prototyp zusammengebaut! :-) Funktioniert auch soweit wie ich das brauche. Hatte nur noch einen Knonzeptfehler drin. Ich muss den Adapter dauerhaft betreiben, weil ein ausbleiben der CAN Botschaft, nachdem mal welche gesendet wurden, nicht zu einem zurückspringen führten. Ich muss explizit AN und AUS per CAN senden. Daher habe ich noch die Anforderung an einen 12V Eingang umgesetzt. Wesentlich aufwendiger war es die Libraries so anzupassen das alles läuft. Due AtTinys haben ja keinen vollwertige SPI, da wird alles über den USI gesteuert. Die Anpassungslib tinySPI muss aber erst mit der CAN_Library verheiratet werden. Und zu guter Letzt noch die Timingregister auf den 8 MHz Quarz des Shields zurechtstutzen. Aber jetzt läuft das Ding. Werde morgen mal die Spannungsversorgung und den Signaleingang in Angriff nehmen. Wenn das läuft, mal schauen wie klein ich das layouten kann.
Olli Z. schrieb: > Wesentlich aufwendiger war es die Libraries so anzupassen das alles > läuft. Due AtTinys haben ja keinen vollwertige SPI, da wird alles über > den USI gesteuert. Die Anpassungslib tinySPI muss aber erst mit der > CAN_Library verheiratet werden. Und zu guter Letzt noch die > Timingregister auf den 8 MHz Quarz des Shields zurechtstutzen. Wie schon oben empfohlen wurde ... einen µC mit integriertem CAN verwenden. Aber man kann es auch umständlich und kompliziert lösen ...
Markus M. schrieb: > Aber man kann es auch umständlich und kompliziert lösen ... Schaut so aus. STM32 mit CubeMx braucht 5 Klicks zum konfigurieren und dann noch 3 Zeilen zum Senden der Nachricht.
Markus M. schrieb: > Wie schon oben empfohlen wurde ... einen µC mit integriertem CAN > verwenden. > > Aber man kann es auch umständlich und kompliziert lösen ... Oder (was wahrscheinlicher ist) so schreiben als ob man es verstanden und gelöst hat. Olli Z. schrieb: > Wesentlich aufwendiger war es die Libraries so anzupassen das alles > läuft. Due AtTinys haben ja keinen vollwertige SPI, da wird alles über > den USI gesteuert. Na und ? Bis auf SS pin ist (fast) alles gleich. Olli Z. schrieb: > Die Anpassungslib tinySPI muss aber erst mit der > CAN_Library verheiratet werden. Was für ein Blödsinn. Warum sollte man das tun ? Seit wann werden verschiedene Libraries miteinander 'verheiratet' ? Olli Z. schrieb: > Witzig, fast genauso hab ich hier gerade einen Prototyp zusammengebaut! > :-) Olli Z. schrieb: > Aber jetzt läuft das Ding. Olli Z. schrieb: > Ich hätte zum testen einen Attiny85 und ein solches CAN Shield hier. Was denn nun - Das Ding läuft oder du hast Tiny zum testen da ? Wieder mal einer der keine Ahnung hat wovon er spricht, aber das Ding gleich kleiner als Fingernagel machen will. Und wo willst du das Ding im Auto überhaupt anschliessen ? Dass der Diagnosestecker an ein Gateway angeschlossen ist, weisst du, oder ? Dass die Betriebserlaubnis sofort erlischt wenn du irgendein CAN-Bus direkt anzapfst, weisst du auch, oder ? Lass die Finger von den Sachen von denen du nichts (oder nicht genügend) verstehst.
Hi, Spi hatte ich per Bitbanding realisiert. Reicht hier ja locker. Vergiss nicht das du auch permanent Botschaften erhälst die abgearbeitet und/oder gefiltert werden müssen! Meine SMD Version war 35 x 23 mm gross. > Dass die Betriebserlaubnis erlischt wenn du irgendein CAN-Bus direkt > anzapfst, weisst du auch, oder ? Das war so klar dass das kommt. Gruß Rene
Rene Z. schrieb: > Spi hatte ich per Bitbanding realisiert. Erstens heisst es Bitbanging (Bitbanding ist etwas gaaaaanz anderes) und zweitens ist USI weitaus einfacher und besser für so etwas. Hättest du es wirklich gemacht, wusstest du es auch. Rene Z. schrieb: > Reicht hier ja locker. > Vergiss nicht das du auch permanent Botschaften erhälst die abgearbeitet > und/oder gefiltert werden müssen! Jaja, sure, Tiny25 reicht ja locker für das alles. Botschaften vorbereiten, mindestens bis zur Adresse dekodieren, senden, empfangen, Fehlerprüfung, Bit stuffing... In der Zwischenzeit über SPI mit anderen Devices komunizieren, vorgesehene Aufgaben erledigen... Rene Z. schrieb: >> Dass die Betriebserlaubnis erlischt wenn du irgendein CAN-Bus direkt >> anzapfst, weisst du auch, oder ? > > Das war so klar dass das kommt. Selbstverständlich muss das kommen. Glaubst du, jeder kann sich mit seinen Spielereien an CAN-Bus dranhängen und munter Botschaften senden, womöglich ohne diese auf Kollision zu prüfen ?
Eine weitere Möglichkeit wäre das Olimexino-STM32: https://www.olimex.com/Products/Duino/STM32/OLIMEXINO-STM32/open-source-hardware Nicht die kleinste Variante, dafür aber geringer Aufwand, weil alles schon fertig aufgebaut ist (Mikrocontroller mit integriertem CAN-Controller, CAN-Transceiver, Schaltregler zur Versorgung aus 9-30V). Programmierbar mit Arduino-artiger IDE oder klassisch.
Hi, >Erstens heisst es Bitbanging (Bitbanding ist etwas gaaaaanz anderes) Wo du Recht hast, ... >Jaja, sure, Tiny25 reicht ja locker für das alles. >Botschaften vorbereiten, mindestens bis zur Adresse dekodieren, senden, >empfangen, Fehlerprüfung, Bit stuffing... >In der Zwischenzeit über SPI mit anderen Devices komunizieren, >vorgesehene Aufgaben erledigen... In meinem speziellen Fall reicht es. Läuft seit 10 Jahren in ca. 40 Geräten. Nein, es muss nur eine Id herausgefiltert werden und das macht der MCP2515. Auch die zu sendende Nachricht wird nur einmal eingestellt und danach immer nur das Komando zum senden der Nachricht abgesetzt. Der Tiny ist die meiste Zeit im Sleepmode. Gruß Rene
Dr. Sommer schrieb: > Eine weitere Möglichkeit wäre das Olimexino-STM32: > https://www.olimex.com/Products/Duino/STM32/OLIMEXINO-STM32/open-source-hardware > Nicht die kleinste Variante, dafür aber geringer Aufwand, weil alles > schon fertig aufgebaut ist (Mikrocontroller mit integriertem Genau. Oder etwas ähnliches. Das macht man sowieso beim testen. Eine (oder 5-10) Mini Platinen selbst beim billigsten Chinesen kosten mindestens so viel. Und dann Bauteile, bestücken, testen, Fehler, wegschmeissen... Rene Z. schrieb: > Meine SMD Version war 35 x 23 mm gross. Und wo ist die ? Ziemlich schöne Zeichnung, aber echte Platine ist wo ?
Angehängte Dateien:
-

20180722_115647.jpg
77 KB -

20180722_115707.jpg
90 KB
Hi, SMD habe ich nie produzieren lassen da die selbst hergestellte THT Version vollkommen ausreichte. Auf dem Bild ist eine frühe Version eines Prototypen zu sehen. Alle anderen sind "unterwegs". Die Platinen sind verbaut an MB Comand Navi. Dazu dann noch ein Composit nach RGB Wandler und für eine Rückfahrkamera oder DVD Player war alles an Board. Ist halt alles schon was her. Aber funktionierte und das reichte mir. Gruß Rene
Warum soll es eigentlich so super klein sein? Gerade im Auto hat man doch üblicherweise reichlich Platz. Willst du es verstecken? Wenn ja, vor wem?
Rene Z. schrieb: >>Erstens heisst es Bitbanging (Bitbanding ist etwas gaaaaanz anderes) > Wo du Recht hast, ... DAS ist auch das einzige was er will, sonst kommt nichts konstruktives, nur Beleidigungen, rumgenörgel und Klugscheißerei. Das hat man schon in den ersten Antworten gesehen. Jeder hats kapiert, nur er nicht. Einfach garnicht drauf eingehen, Rene! Der will nur eine „ich bin schlauer wie Du“ Debatte führen. Am Ende mahnt er noch die Rechtschreibung an.. einfach nur armselig. > In meinem speziellen Fall reicht es. Und mir würde das ebenfalls reichen. Paketempfang und Verarbeitung ist garnicht notwendig. Ich teagiere nur auf ein Schaltsignal und sende. Das ganze läuft natürlich nicht auf dem HSCAN der Motorsteuerung sondern dem Multimedia-CAN, also auch eher unkritisch. > die meiste Zeit im Sleepmode. Ich starte/stoppe den Sender per Zündungsplus (Kl. 15). Reicht in meinem Fall. Um „Stückzahlen“ gehts bei mir nicht, ich wollte einfach nur einen simplen aber halbwegs brauchbaren Ansatz. Habe schon Adapter gesehen die Schaltsignale aus dem Auto einfach mittels Vorwiderstand zum uC leiten. So weit wollte ich es nicht treiben. Die Schaltung sollte schon minimale Anforderungen im KFZ Bereich erfüllen.
Stefanus F. schrieb: > Warum soll es eigentlich so super klein sein? > Gerade im Auto hat man doch üblicherweise reichlich Platz. Willst du es > verstecken? Wenn ja, vor wem? Von Superklein war garnicht die Rede. Ich meinte auch klein in Sinne einer einfachen Schaltung.
Stm32f103c8t6 (auf bluepill Board) und can-transceiver (kann man auf Loch Raster unter dem BP verstecken) sind alles was du brauchst. Dazu einen 5V regler (78L05 reicht für eine Bastelei voll aus) und fertig ist die Laube. Billiger wird es nicht werden.
Olli Z. schrieb: > DAS ist auch das einzige was er will, sonst kommt nichts konstruktives, > nur Beleidigungen, rumgenörgel und Klugscheißerei. Das hat man schon in > den ersten Antworten gesehen. Sicher. Irgendwelchen Mist erzählen, danach behaupten, du hättest es gar nicht so gesagt oder gemeint. Wo habe ich dich beleidigt ? Ich mag sonstwas sein, aber ein talent habe ich - ich kann Lügner und Angeber sogar über Internet riechen - und wenn ich denen die Wahrheit sage, verwechseln diese das mit Beleidigungen. Marc V. schrieb: > Olli Z. schrieb: >>> Alle xx sec. ? >>> Auf Anfrage ? >> >> Das spielt alles keine Rolle, aber es ist periodisch (alle 200ms). > > Natürlich spielt das eine Rolle. Auf Anfrage bedeutet, dass der Chip > imstande sein muss, CAN-Messages zu empfangen und zu dekodieren. > Alle xx sec. bedeutet, dass die Meldung ganz einfach rausgeschickt > wird. > >> Im prinzip müsste das sogar mit einfachem Bitbangig gehen, aber um keine >> unnötigen Resends und Kollisionen zu produzieren wäre ein echter >> CAN-Controller schon gut. > > Kollision ist auch bei Bitbanging ganz leicht festzustellen. > > Und Resends bedeutet Bestätigung. Wer soll wem da was bestätigen ? > > Weißt du überhaupt was du willst und wovon du redest ? Olli Z. schrieb: >> Gerade im Auto hat man doch üblicherweise reichlich Platz. Willst du es >> verstecken? Wenn ja, vor wem? > > Von Superklein war garnicht die Rede. Ich meinte auch klein in Sinne > einer einfachen Schaltung. Olli Z. schrieb: > Da das ganze möglichst klein sein soll wär meine Frage an Euch, ob es > noch bessere Chips für eine solch triviale Aufgabe gibt? Das ganze soll > so klein und günstig wie möglich werden. Jemand, der nicht mal weiss, wie etwas funktionieren soll, es aber gleich so klein wie möglich haben will, ist weder imstande noch wird er das jemals fertig kriegen. Punkt.
> Der will nur eine „ich bin schlauer wie Du“ Debatte führen.
Es heißt "schlauer ALS du" :-)
SCNR
Olli Z. schrieb: > Klingt interessant. Ausser den 7805 würde ich durch einen Lowdrop Regler > ersetzen, da ich keine Heizung brauche und mit Drossel und Transil-Diode > schützen. wenn man irgendwoher 5,5V bekommt kann man über einen Low Drop Regler nachdenken wenn man aber 14V hat muss der genau so viel verheizen wie ein 7805.c
> Von Superklein war garnicht die Rede. > Ich meinte auch klein in Sinne einer einfachen Schaltung. Ach so, das ist schon ein Unterschied. > es aber gleich so klein wie möglich haben will Trifft nicht mehr zu. Das Bluepill Board enthält bereits einen Spannungsregler, vermutlich einen RT9193. Leider will dieser nciht viel mehr als 5V Eingangsspannung sehen. Ich würde mal schauen, ob diese kleinen "Zuckerwürfel" von Recom (R-78E5.0-0.5) geeignet sind.
Dr. Sommer schrieb: > Eine weitere Möglichkeit wäre das Olimexino-STM32: > https://www.olimex.com/Products/Duino/STM32/OLIMEXINO-STM32/open-source-hardware > Nicht die kleinste Variante, dafür aber geringer Aufwand, weil alles > schon fertig aufgebaut ist (Mikrocontroller mit integriertem > CAN-Controller, CAN-Transceiver, Schaltregler zur Versorgung aus 9-30V). > Programmierbar mit Arduino-artiger IDE oder klassisch. Ein solches Board habe ich sogar hier. Nur war es mir zu teuer und zu schade für eine solche triviale Anwendung :-)
Olli Z. schrieb: > . > > Ein solches Board habe ich sogar hier. Nur war es mir zu teuer und zu > schade für eine solche triviale Anwendung :-) Das Board ist doch wie dafür gemacht... Und viel billiger und zugleich so elegant aus einem Guss wird's nicht. Gerade der integrierte Schaltregler macht es attraktiv.
Max D. schrieb: > Stm32f103c8t6 (auf bluepill Board) und can-transceiver (kann man auf > Loch Raster unter dem BP verstecken) sind alles was du brauchst. Dazu > einen 5V regler (78L05 reicht für eine Bastelei voll aus) und fertig ist > die Laube. > Billiger wird es nicht werden. Auch ne gute Idee! Im Vergleich zum Arduino Nano hat der STM ja einen CAN Controller, d.h. man benötigt wirklich nur einen externen Transceiver. Eigentlich wollte ich das ganzr nicht als SMD aufbauen, sondern in THT und da halt „möglichst platzsparend“. Nicht um es zu verstecken, sondern damit es an die Stelle wo es rein soll auch hinpasst. Inzwischen bin ich aber auf dem Trichter das ich mir doch eine Platine route und alles in SMD ausführe. Mit dem 7805 bin ich irgendwie unglücklich. Aber meine Schaltung muss während dem anlassen nicht zwingend funktionieren. Ich denke ich werde aber eher auch einen AMS1117 nehmen. Fehlt nur noch der Signaleingang. Da schwebt mir derzeit ein Konstrukt aus Vorwiderstand, Kondensator und NPN-Schalttransistor vor.
Der ams1117 stirbt bei dem ersten Husten der LiMa. 78(L)05 verkraftet "übliche" Spannungen im Kfz ganz gut, nur die extremen testpulse würden Probleme bereiten. In der Praxis ist die Spannung eines modernen Kfz aber zahm genug. Der regler hat ~2V dropout, also darf deine batt bis 7 v einknicken. Das tut normal erst nach dem 10 startversuch im tiefsten Winter. Solange du also nur eine Bastelei brauchst die weitestgehend zuverlässig arbeitet ist ein robuster regler wie der 7805 die richtige Wahl. Wenn du es zertifizieren lassen willst/musst, dann brauchst du noch etwas Schutz davor. Als Eingang ist ein kleiner Transistor mit einem großen Basisvorwiderstand wohl mit das robusteste für den kleinen Geldbeutel. Wenn es Probleme mit Masse-Versatz gibt, kann ein Widerstand von der Basis zum emitter den schaltpunkt nach oben korrigieren.
https://www.nxp.com/support/developer-resources/hardware-development-tools/lpcxpresso-boards/lpcxpresso-board-for-lpc11c24-with-cmsis-dap-probe:OM13093 Dann noch ein Automotive zertifiziertes SR Modul (Traco, Recom, ..) fertig ist die Laube. Hast sogar gleich noch den Debugger dabei den du abtrennen kannst wenn du ihn nicht mehr benötigst. Die Sub9 Buchse kannst du auch gleich noch drauf löten.
Olli Z. schrieb: > Max D. schrieb: >> Stm32f103c8t6 (auf bluepill Board) und can-transceiver (kann man auf >> Loch Raster unter dem BP verstecken) sind alles was du brauchst. Dazu >> einen 5V regler (78L05 reicht für eine Bastelei voll aus) und fertig ist >> die Laube. >> Billiger wird es nicht werden. > > Auch ne gute Idee! Im Vergleich zum Arduino Nano hat der STM ja einen > CAN Controller, d.h. man benötigt wirklich nur einen externen > Transceiver. Du könntest einen dsPIC33FJ64GP802 nehmen. Das ist ein 28-Pinner, den es in unter anderem in SO28 oder in SDIP28 gibt. Das wäre auch lochrastergeeignet. > Mit dem 7805 bin ich irgendwie unglücklich. Aber meine Schaltung muss > während dem anlassen nicht zwingend funktionieren. Ich denke ich werde > aber eher auch einen AMS1117 nehmen. Der braucht dann aber noch einiges an Schutzschaltung. fchk
Ich würde für einen System-Basis-Chip wie z.B. den UJA1076A plädieren, der hat Spannungsregler (5V oder 3,3V), CAN-Transceiver, Watchdog und auch Wake-Inputs in einem Chip. Dazu einen Automotive-tauglichen Controller. Das ist jetzt zwar wohl nicht die kostengünstigste Lösung, aber zumindest eine, zu der ich einigermaßen Vertrauen hätte.
Interessanter Chip! Für um die 3,- jetzt auch nicht sooo überteuert ;-) Etwas schwer zu beschaffen vielleicht. Aber zumindest bei Farnell bekommt man den auch als Privatmann (Hobbybastler).
Der MIC2950 wäre ideal als Spannungsregler für meine Anwendung. Er ist klein, günstig, automotive geeignet (-20 bis +60V Eingangsspannung, strombegrenzt, überhitzungsgeschützt und fest gegen andere div. Störungen im Auto) und liefert bei 5V ca. 150mA. Für meinen Fall genau richtig. Schade nur das es den hierzulande nur bei Mouser gibt... http://ww1.microchip.com/downloads/en/DeviceDoc/mic2950.pdf
Hi, leider nicht eingeloggt. Bei TME gibt es auch den NUP2105. https://www.onsemi.com/pub/Collateral/AND8169-D.PDF Gruß Rene
Das ist doch noch alles viel zu groß! Nimm einen einfacher 8 Pin µC, der einen CAN Botschaft mit der niedrigsten ID via zwei Port Pins auf CAN_H und CAN_L sendet ;-)
>Schau mal hier. >Ebay-Artikel Nr. 263779810424 Das hat er doch schon auf dem Tisch liegen. Ich arbeite auch gern damit. >Nimm einen einfacher 8 Pin µC, der einen CAN Botschaft mit der >niedrigsten ID via zwei Port Pins auf CAN_H und CAN_L sendet ;-) Alles eine Frage der Bitrate.
Rene Z. schrieb: >>Schau mal hier. Ebay-Artikel Nr. 263779810424 Sowas habe ich auch genommen :-) Man muss nur auf die 8 MHz vom Qaurz achten. Die waren in China scheinbar billiger als die sonst gebräuchlichen 16 er. Jedenfalls fehlt vielen CAN Libs die entsprechende Takteinstellung dafür. Wie ich damit zum ersten mal gearbeitet hab, hat mich das ne Zeit gekostet dahinter zu kommen. :-/ >>Nimm einen einfacher 8 Pin µC, der einen CAN Botschaft mit der >>niedrigsten ID via zwei Port Pins auf CAN_H und CAN_L sendet ;-) > > Alles eine Frage der Bitrate. Nein, leider alles nur Bla bla. Klar wäre Bitbanging das einfachste, aber dann bitte mal Konkret, mit Codevorschlag, Hintergrundinfo und alles weitere und nicht bloss einen Brocken hinwerfen! Per Prinzip könnte man einen X-beliebigen CAN-Transceiver a la MCP2551, TJA1050, usw. nehmen und TX und RX der TTL Seite mit IO Pins verbinden. Wenn man das komplette Datagramm kennt, also mit allen Kontrollbits und Checksummen (könnte man z.b, mittels Logicanalyzer aufzeichnen) und auch das Timing einhält könnte das klappen. Hierzu sollte der Attiny dann wohl besser mit einem externen Quarz betrieben werden, was leider schon zwei Pins kostet, aber noch genug für die Funktion übrig bleiben. Man muss aber wenigstens grundlegende Funktionen des CAN Controllers implementieren. Z.b. die Kollisionserkenning (Arbitrating) indem man jedes gesendete Bit mit dem eingehenden auf dem RX Pin vergleicht und bei Abweichungen sofort das senden einstellt. Einen Versuch wäre es wert. Ich kann das Datagramm ja mal aufzeichnen und versuchen nachzuspielen.
Rene schrieb: > Hi, den gibt es bei TME.eu .Gruss Rene Leider schon etwas teuer, 6-8€ nur für den Regler. Ich glaub da ordere ich mir mal ein paar aus Übersee ;-)
Olli Z. schrieb: > Per Prinzip könnte man einen X-beliebigen CAN-Transceiver a la MCP2551, > TJA1050, usw. nehmen und TX und RX der TTL Seite mit IO Pins verbinden. Ich glaube er meinte das noch minimalistischer. Dominater Pegel: CAN_H Output High, CAN_L Output Low; rezessiver Pegel CAN_H und CAN_L als Input. Arbitrierung wird überbewertet, ansonsten wird zu Gegenlesen halt noch ein dritter Pin (dauerhaft Input) benötigt. Und dann noch die ersten paar Frames auf dem Bus zur Synchronisation ausmessen und damit den RC-Oszillator nachtrimmen ;-)
soul e. schrieb: > Ich glaube er meinte das noch minimalistischer. Dominater Pegel: CAN_H > Output High, CAN_L Output Low; rezessiver Pegel CAN_H und CAN_L als > Input. Arbitrierung wird überbewertet, ansonsten wird zu Gegenlesen halt > noch ein dritter Pin (dauerhaft Input) benötigt. Verstehe, zumindest in der Theorie ;-) D.h. ohne jeglichen Transceiver direkt (naja, nen kleinen Widerstand wohl noch) die IO-Pins an den Bus. Damit "dehnt" man die Spezifikationen aber schon gewaltig, nicht wahr? Im rezessiven und im Ruhezustand haben CAN_H und CAN_L ja 2,5V, im Dominanten hat CAN_H 3,5V und CAN_L 1,5V. Da würde man dann ohne zu zucken mit 5V und 0V arbeiten?! Oder einen Spannungsteiler, welcher im Ruhezustand (Logisch 0) einen 3,5V Pegel anlegt und im geschalteten einen Widerstand zusätzlich schaltet:
1 | +5V o---+ |
2 | | |
3 | [R4] |
4 | | |
5 | +-[ R2 ]--+------o CAN_H |
6 | | | |
7 | IO o---[ R1 ]---|< T1 | |
8 | | [R3] |
9 | | | |
10 | GND o--+---------+ |
11 | T1 = NPN |
12 | R1 = 1k |
13 | R2 = 450 Ohm |
14 | R3 = 680 Ohm |
15 | R4 = 270 Ohm |
Im Vergleich zu LIN oder sonstigen Leitungen im Auto ist der CAN ja meist relativ frei von Störungen und Spannungsschwankungen. > Und dann noch die ersten paar Frames auf dem Bus zur Synchronisation > ausmessen und damit den RC-Oszillator nachtrimmen ;-) Könnte ich mir vorstellen.
Olli Z. schrieb: > Damit "dehnt" man die Spezifikationen aber schon gewaltig, nicht wahr? Das kann man wohl so sagen... > Im rezessiven und im Ruhezustand haben CAN_H und CAN_L ja 2,5V, im > Dominanten hat CAN_H 3,5V und CAN_L 1,5V. Sagen wir lieber 3,0..4,25 V bzw 0,5..1,75V. Eine gewisse Toleranz ist vorhanden. Der Receiver bewertet nur die Differenz, der käme also auch mit 5 V und 0 V klar. > Im Vergleich zu LIN oder sonstigen Leitungen im Auto ist der CAN ja > meist relativ frei von Störungen und Spannungsschwankungen. Das dürfte die größte Schwachstelle sein. Einmal 12 V drauf und der Controller ist hin. Ein Transceiver steckt bis 27 V ohne Probleme weg.
Diese Transistorschaltung von Olli Z. berücksichtigt nicht, dass der Bus einen gewissen Wellenwiderstand hat und saubere Abschlusswiderstände benötigt. Das würde so bestenfalls mit einer simplen Punk-zu-Punkt Verbindung zuverlässig funktionieren. Also ich hätte große Hemmungen, an einem KFZ solche Experimente zu machen. Ich habe eine Familie zu versorgen.
Stefanus F. schrieb: > Also ich hätte große Hemmungen, an einem KFZ solche Experimente zu > machen. Ich habe eine Familie zu versorgen. Das ist doch dem Drittanbieter egal...
Stefanus F. schrieb: > Diese Transistorschaltung von Olli Z. berücksichtigt nicht, dass der Bus > einen gewissen Wellenwiderstand hat und saubere Abschlusswiderstände > benötigt. Das würde so bestenfalls mit einer simplen Punk-zu-Punkt > Verbindung zuverlässig funktionieren. Richtig. > Also ich hätte große Hemmungen, an einem KFZ solche Experimente zu > machen. Ich habe eine Familie zu versorgen. Das ist ja auch eher ein theoretisches Gedankenspiel und zeigt die Grenzen der Machbarkeit. Eine Schaltung ohne Transceiver und ggf. auch ohne Controller setzt ganz stark darauf das alle anderen Busteilnehmer sich an die Specs halten und einen solchen "Störenfried" tolerant behandeln. Unterm Strich wäre ein LPC11C24 in Kombination mit einem Automotive Spannungsregler wie z.B. dem MIC2950 eine gute Wahl. Der LPC hat neben einem CAN-Controller nämlich auch gleich einen Transceiver mit drauf. Da braucht es wirklich nur noch eine Mini-Stromversorgung für wenige Milliampere. Das Ganze dann auf einem kleinen SMD-Board. Ich weiß wohl das Elektronikmodule im Auto grundsätzlich kurzschlußfest, verpolungssicher, über- und unterspannungssicher, EMV geschützt, Stromsparend und Emissionsarm sein sollten. Hier soll aber kein professionelles, verkaufsfähiges Gerät entstehen sondern :-)
Olli Z. schrieb: > Ich weiß wohl das Elektronikmodule im Auto grundsätzlich kurzschlußfest, > verpolungssicher, über- und unterspannungssicher, EMV geschützt, > Stromsparend und Emissionsarm sein sollten. Du hast funktionssicher vergessen, je nachdem an welchem Bus du rumpfuschen willst.
Stefanus F. schrieb: > Also ich hätte große Hemmungen, an einem KFZ solche Experimente zu > machen. Ich habe eine Familie zu versorgen. Das ist auch mehr ein proof of concept als eine serientaugliche Lösung. Wie damals IgorUSB von Igor Češko. Der hat mit einem stinknormalen ATmega ohne jegliche Zusatzhardware lowspeed-USB gemacht.
Ich experimentiere gerade mit einem Aufbau: ATTiny85 mit 16MHz Quarz (für ein hoffentlich temperaturstabileres und präziseres Bit-Timing) und TJA1050 als Transceiver. Weiterhin habe ich herausgefunden das ich den EIN- und AUS-Zustand den ich übertragen möchte nur ein einziges Mal auf den Bus legen muss. D.H. ich könnte wieder meine ursprüngliche Idee angehen, den Attiny mit dem 12V Schaltsignal zu versorgen. Für einen sauberen Start bräuchte es vielleicht nur ein kleines RC-Glied am /RESET Pin, aber auch das sollte eigentlich nicht nötig sein und wäre eine reine Vorsichtsmaßnahme. Damit ich noch wenigstens ein paar AUS Botschaften übertragen kann, müsste ein Elko den Tiny und TJA noch kurz nach dem abschalten des 12V Signals versorgen. Der Tiny nimmt ca. 9 mA auf und der TJA auch. Also 20, sagen wir 50 mA für eine halbe Sekunde. Grad so lange um genügend Nachrichten zu senden das der Zustand auch wirklich ankommt. Vielleicht ein 1.000uF Elko sekundärseitig?!
Olli Z. schrieb: > Damit ich noch wenigstens ein paar AUS Botschaften übertragen kann, > müsste ein Elko den Tiny und TJA noch kurz nach dem abschalten des 12V > Signals versorgen. Sowas ähnliches habe ich schon mal bei einem Atmega328+MCP2515 gemacht: Die 12V KFZ-Eingangsspannung vor dem Spannungsregler per Spannungsteiler auf einen ADC-Pin gelegt und so die Versrogungsspannung mitgemessen. Bei Zündung aus fiel bei meinem Fahrzeug die Spannung über 150ms auf 0 ab, genügend Zeit um darauf zu reagieren. Mit ein paar Elkos lief der Atmega nochmals 100ms nach und ich konnte noch 10 CAN-Botschaften rausschicken. Für dein Vorhaben würde ja auch ein digitaler Pin-Interrupt auf Low oder ein Compare-Irq reichen.
Wenn Du schon bei AVR bleiben möchtest, weil eben bekannt und so, nimm wenigstens einen ATMega16M1 dafür statt Dir per Bitschubsen den CAN zu verseuchen.
Thomas F. schrieb: > Olli Z. schrieb: >> Damit ich noch wenigstens ein paar AUS Botschaften übertragen kann, >> müsste ein Elko den Tiny und TJA noch kurz nach dem abschalten des 12V >> Signals versorgen. > > Sowas ähnliches habe ich schon mal bei einem Atmega328+MCP2515 gemacht: > > Die 12V KFZ-Eingangsspannung vor dem Spannungsregler per Spannungsteiler > auf einen ADC-Pin gelegt und so die Versrogungsspannung mitgemessen. Bei > Zündung aus fiel bei meinem Fahrzeug die Spannung über 150ms auf 0 ab, > genügend Zeit um darauf zu reagieren. Mit ein paar Elkos lief der Atmega > nochmals 100ms nach und ich konnte noch 10 CAN-Botschaften rausschicken. > > Für dein Vorhaben würde ja auch ein digitaler Pin-Interrupt auf Low oder > ein Compare-Irq reichen. Ich habe das jetzt mal versucht, leider ist es nicht stabil. Mal klappts, mal nicht. Vom Setup her habe ich die Versorgungsspannung (ca. 12V) über einen 10k auf einen NPN-Transistor geführt. Dieser Schaltet dann über einen 10k Widerstand von +5V den Eingang. Auf der Sekundärseite des Spannungsreglers habe ich einen 1.000 µF Kondensator platziert. Auf dem Oszi sieht man nach abziehen der Stromversorgung schön wie es absinkt. Die Schaltung braucht ca. 20 mA (CAN-Transceiver und Attiny). Bis das der HIGH-Pegel vom 12V-Eingang erkannt wird dauert es max. 10 ms. Dann wird mit einem Abstand von 20 ms die CAN-Botschaft (AUS) gesendet. Soweit die Theorie.
Rudolph schrieb: > Wenn Du schon bei AVR bleiben möchtest, weil eben bekannt und so, nimm > wenigstens einen ATMega16M1 dafür statt Dir per Bitschubsen den CAN zu > verseuchen. Der 16M1 ist nicht schlecht, aber auch sehr teuer und schwer zu beschaffen. Fertige Boards sind ebenfalls rar. Bislang bin ich mit meiner Lösung Attiny85+TJA1050 ganz zufrieden. Sie tut wie sie soll. Bin gerade dabei das ganze auf AVR Studio zu portieren und dann in Assembler. Aber mit dem externen 16 MHz Quarz ist das Timing selbst in C schon perfekt. Perfekt genug jedenfalls für einen 125 kbaud Multimedia-CAN. Neben sturem senden, lese ich auch immer eub gesetztes rezessives Bit (HIGH) zurück und breche die Routine ggf. ab. Auch schaue ich vor dem senden das auf RX wenigstens für einige uS kein Traffic (0er) liegt. So gesehen verhalte ich mich schon ähnlich wie ein CAN-Controller ;-) Als Spannungsregler teste ich gerade den MIG2950 mit 5,0V. Der soll laut Datenblatt ca. 150 mA leisten, was für meine Schaltung mehr als genug ist und er ist automotive geeignet. Trotzdem erhält er primärseitig noch einen Varistor. Verpolungssicher ist der MIG von hause aus.
Olli Z. schrieb: > Der 16M1 ist nicht schlecht, aber auch sehr teuer und schwer zu > beschaffen. Naja, ich habe nur mal gerade bei Mouser rein gesehen, die haben 2361 Stück davon ab Lager und einer kostet 3,61€. Digi-Key hat 5351 Stück für 3,62€. Wie viele von den Geräten willst Du denn bauen? 1000? 25000? Oder doch nur 1? Die haben auch gleich schicke kleine Quarze dafür, NX3225 (644-1233-6-ND ), die waren für mich vor einiger Zeit noch nicht so leicht beschaffbar. Alles andere haben die auch und zig Teile mehr, die 50 Euro um Versandkostenfrei zu bestellen kommen da schnell zusammen und Paypal nehmen die auch noch. :-) Ich finde übrigens den MIC5233-5.0 ganz schick. Wobei ich auf den TLE4266-2G umgestiegen bin um einen höheren Isolationsabstand erreichen zu können. Für den CAN benutze ich aktuell TJA1043, im Kombination mit den Spannungsreglern lässt sich die Platine dann auch per Software abschalten und per CAN wecken. Als Stecker für sowas nehme ich gerade bevorzugt die MX34, für sowas etwa MX34005NF1 (670-2283-ND) plus MX34005SF1 (670-2284-ND)und M34S75C4F1 dazu (670-2268-1-ND). > Fertige Boards sind ebenfalls rar. In Zeiten von 5 Platinen für weniger als 10 Euro aus China ist das gar kein Argument mehr. Make! :-) > Bislang bin ich mit meiner Lösung Attiny85+TJA1050 ganz zufrieden. Na denn. > Perfekt genug jedenfalls für einen 125 kbaud Multimedia-CAN. Bäh, vielleicht auch noch LowSpeed? Dann passt der TJA1050 aber nicht wirklich. Aber da LowSpeed schon länger am Aussterben ist, hoffentlich HighSpeed auf niedrigerer Geschwindigkeit.
Danke für die wertvollen Tipps, Rudolph! Ja, das mit Mouser stimmt wohl. Es gibt ja praktisch nichts was die nicht haben ;-) Ich weiss das der TJA1050 eher unterfordert ist, aber laut Spec sind ab 10 kbaud alles möglich und günstig ist er auch. Aufwecken benötige ich bei meiner Aplikation nicht. Da ist es bei 125 kbaud fast egal was man nimmt... ich hatte hat grad solche da. Der MIC5223 kann aber nur max. 36V und würde einen Loaddump womöglich nicht überleben. Der MIG2950 geht bis 60V und -20V und braucht auch nur 1,5 uF zur Schwingunterdrückung.
Olli Z. schrieb: > Ich weiss das der TJA1050 eher unterfordert ist Es geht nicht um unterfordert, das ist ein HighSpeed Transceiver und 125kBit sieht erstmal nach LowSpeed aus. Auch wenn die Bezeichnung das vermuten lässt, die Datenrate ist nicht der wesentliche Unterschied dabei, die Pegel sind anders. In aktuelleren Fahrzeugen ist hoffentlich nur noch HighSpeed zu finden, wenn vielleicht mal mit niedrigerer Datenrate. > Der MIC5223 kann aber nur max. 36V und würde einen Loaddump womöglich > nicht überleben. Dafür packt man da eine Transientenschutz-Diode davor, bei 60V ist auch noch lange nicht Ende. > Der MIG2950 geht bis 60V und -20V und braucht auch nur > 1,5 uF zur Schwingunterdrückung. Dafür kommt der nicht mit Keramik-Kondensatoren klar, im Datenblatt steht Tantal oder Alu-Elko. Da steht zwar 5 Ohm oder weniger, das heisst aber noch lange nicht, dass der mit einem Keramik-C nicht schwingt. Wenn Du das mit einem Keramik-C planst, nimm vorsichtshalber 2µ2+ und einen 2R2 oder so in Reihe dazu.
Olli Z. schrieb: > Danke für die wertvollen Tipps, Rudolph! Tipps, wofür ? Ihr zwei diskutiert immer noch über etwas, das nie etwas war und nie etwas wird ? Olli Z. schrieb: > Ich habe das jetzt mal versucht, leider ist es nicht stabil. Mal > klappts, mal nicht. Olli Z. schrieb: > Bislang bin ich mit meiner Lösung Attiny85+TJA1050 ganz zufrieden. Sie > tut wie sie soll. Olli Z. schrieb: > Auch ne gute Idee! Im Vergleich zum Arduino Nano hat der STM ja einen > CAN Controller, d.h. man benötigt wirklich nur einen externen > Transceiver. Ja, ja, man will alles, nur können kann man nicht so recht... Olli Z. schrieb: > Klar wäre Bitbanging das einfachste, aber dann bitte mal Konkret, mit > Codevorschlag, Hintergrundinfo und alles weitere und nicht bloss einen > Brocken hinwerfen! Willst du nur Code oder soll man dir gleich einen programmierten uC (womöglich mit Transceiver auf einer Platine) Portofrei zusenden ?
Rudolph R. schrieb: > Auch wenn die Bezeichnung das vermuten lässt, die Datenrate ist nicht > der wesentliche Unterschied dabei, die Pegel sind anders. Du meinst bezüglich der Flankensteilheit und Über/Unterschwingen? Ich weiss das in anderen Modulen für den HSCAN häufig ein TJA1050 und für den MSCAN/MMCAN ein TJA1040 verbaut wird. >> Der MIG2950 geht bis 60V und -20V und braucht auch nur >> 1,5 uF zur Schwingunterdrückung. > Dafür kommt der nicht mit Keramik-Kondensatoren klar, im Datenblatt Kein Problem, ich habe hier einfach einen kleinen Elko liegend eingeplant. Das passt noch gut. Sag mal, ich experimentiere noch an der POWEROFF-Schaltung. Ich möchte ja bei Spannungsabschaltung noch ein paar Nachrichten versenden. Dazu muss ich zum einen die Eingangsspannung überwachen und bei unterschreiten von, sagen wir 9V einen Interrupt auslösen. In der Zeit in der mein LowDrop Spannungsregler mit dem nachgeschalteten Elko die CPU und den CAN-Controller noch versorgen kann sollen dann wenigstens noch 2-3 Abschalt-Nachrichten raus. Unterhalb von 5V wirds eng, weil da schon die Brown-Out-Detection vom Chip zuschlagen könnte. Eine Nachricht braucht ca. 800 us, mit Pause dazwischen also ca. 4-5 ms sollten schon drin sein. Die Schaltung benötigt ca. 20 mA Strom bei 5V. Um die Bordspannung zu messen muss ich diese unter den 5V Pegel bekommen, z.B. mit einem hochohmigen Spannungsteiler. Leider habe ich hier bislang noch keine stabile Schaltung zusammen bekommen. Mal klappts und dann wieder nicht. Wenn ich den Puffer-Elko zu groß wähle überlaste ich den Spannungsregler beim einschalten, oder bekomme den Elko nicht genügend aufgeladen um eine kurze Schaltsequenz zu überbrücken. Alternativ müsste ich die Schaltung mit Dauerspannung versorgen und Sleep-Modi implementieren. Aber das würde wieder zusätzlichen Verkabelungsaufwand nach sich ziehen...
Olli Z. schrieb: >> Auch wenn die Bezeichnung das vermuten lässt, die Datenrate ist nicht >> der wesentliche Unterschied dabei, die Pegel sind anders. > Du meinst bezüglich der Flankensteilheit und Über/Unterschwingen? Ich > weiss das in anderen Modulen für den HSCAN häufig ein TJA1050 und für > den MSCAN/MMCAN ein TJA1040 verbaut wird. Nein, die Buspegel sind unterschiedlich bei LowSpeed und HighSpeed: https://elearning.vector.com/index.php?&wbt_ls_seite_id=504216&root=376493&seite=vl_can_introduction_de Der TJA1040 ist ja nur etwas älter, aber ebenfalls ein HighSpeed Transceiver. Strom sparen bei Inaktivität geht am Besten über einen Wakeup fähigen CAN-Transceiver wie den TJA1043 und einen abschaltbaren Spannungsregler. Die Kombination aus ATMEGA16M1, TLE4266-2 und TJA1043 die ich hier gerade auf dem Tisch habe kommt auf 20µA im ausgeschalteten Zustand an 12V.
Rudolph schrieb: > Nein, die Buspegel sind unterschiedlich bei LowSpeed und HighSpeed: > https://elearning.vector.com/index.php?&wbt_ls_seite_id=504216&root=376493&seite=vl_can_introduction_de Ah, alles klar! Ich habe definitiv Highspeed-CAN-Busse, da diese alle 2,5V Ruhepegel (Rezessiv) haben. > Der TJA1040 ist ja nur etwas älter, aber ebenfalls ein HighSpeed > Transceiver. Richtig. Genauso wie auch der MCP2551 den ich auch noch hier hätte. > Strom sparen bei Inaktivität geht am Besten über einen Wakeup fähigen > CAN-Transceiver wie den TJA1043 und einen abschaltbaren Spannungsregler. > Die Kombination aus ATMEGA16M1, TLE4266-2 und TJA1043 die ich hier > gerade auf dem Tisch habe kommt auf 20µA im ausgeschalteten Zustand an > 12V. Das ist ganz ordentlich! Mein Ansatz wäre aber ohne Dauerplus auskommen zu können und damit keine Powersafe/Wakeup Funktionen implementieren zu müssen. Ich muss mal experimentell ermitteln, wie lange der Attiny85 in der Lage ist einen IO-Pin zu swappen, nachdem er sich nur noch aus einem Elko versorgt. Das sollte ich mit einer kleinen Testschaltung am DSO durchführen können. Andere haben es ja offensichtlich auch geschafft.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.