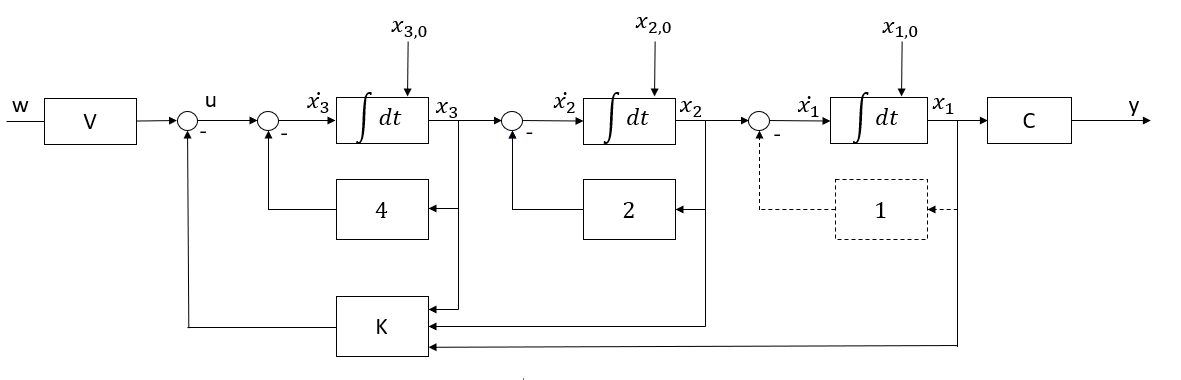
Hallo liebes µC-Forum, da ich keine Erfahrung im Bereich der Regelungstechnik habe, bräuchte ich eure Hilfe. Es soll die stationäre Genauigkeit einer Zustandsregelung mittels Matlab untersucht werden. In der ersten zu untersuchenden Variante ist der gestrichelte Zweig vorhanden, ansonsten fehlt dieser. Folgende Teilaufgaben sind für beide Varianten zu untersuchen: a) Aufstellung der Zustandsbeschreibung der Regelstrecke und des geschlossenen Kreises. Grafische Darstellung der regelstrecke mit normierter Sprungantwort unter der Annahme, dass alle Anfangsbebingungen Null sind. b) Prüfen der Vorraussetzungen für die Anwendbarkeit der Zustandsregelung. c)Entwurf der Zustandsregler nach dem Polvorgabeverfahren (Pollagen ergeben sich durch die Multiplikation aller Streckenpole mit dem Faktor 1,5). In der zweiten Variante sollen die Zahlenwerte der berechneten Pole aus der ersten Variante übernommen werden. d) Simulierung des Verhaltens des geschlossenen Kreises, wenn das Führungssignal ein Einheitssprung ist. Untersuchen, ob stationäre Genauigkeit vorliegt beim vernachlässigen des Vorfilters V. Falls dies nicht gegeben ist, Bemessung des Vorfilters. Vorfilterbemessungsvorschrift:
Bisher habe ich mich in die Materie bisschen reingelesen und Folgendes herausgefunden: Zur Aufgabe a) Das Signalflussbild kann in einen Regler und eine Regelstrecke unterteilt werden. In der Literatur fand ich ein Leitfaden zur Aufstellung eines Zustandsvariablen-Modells, welche wahrscheinlich ein Synonym für die Zustandsbeschreibung ist. Für die Regelstrecke schrieb ich die Zustandsgleichungen auf:
In der Matrix-Form:
Hier ergab sich die erste Hürde: Soll die Zustandsgröße des ersten Gliedes als erster Eintrag im Zustandsvektor stehen oder wie in der Literatur mit
beginnen? Habe mich fürs letztere entschieden. Für die Bestimmung der Eigenwerte habe ich das charakteristische Polynom von A mit folgenden Ansatz: N(s)= det(sI-A)aufgestellt. Die Determinante ergab ein Polynom dritter Ordnung, welches durch eine Polynom-Division und anschließende PQ-Formel leicht aufzulösen war. Das Resultat wurde in der Literatur als "Streckenpole" bezeichent und stimmen mit dem Matlab-Befehl "eig" überein.
Um Aufgabe a) zu lösen, muss ich jedoch die Zustandsbeschreibung des geschlossenen Kreises aufstellen. Wie gehe ich da vor? In der Teilaufgabe b) fand ich bisher nichts in meinen Büchern. Da die Steuerbarkeit und Beobachtbarkeit oftmals als nächster Punkt folgt, ging ich von, dass die Teilaufgabe b) genaug diese "Voraussetzungen" meint. Dazu nutzte ich diese Formeln: Steuerbarkeit:
Mit dem Matlab-Befehl "ctrb" erhielt ich die identische Steuerbarkeitsmatrix, deren Determinante ungleich 0 gewesen ist. Beobachtbarkeit:
Mein Vektor c war das oben definierte y=[C 0 0], mit der unbekannten Variable C. Weiter ist mir erstmal nichts zur Teilaufgabe b) eingefallen. In der Teilaufgabe c) multiplizierte ich die bereits ermittelten Streckenpole mit dem Faktor 1,5 und erhielt somit die Pollagen p1=1,5, p2=3 und 3=6. Damit konnte ich den Alpha-Vektor berechnen:
und schließlich den Reglervektor k:
Wie kann ich nun mit dem Reglervektor k den Zustandsregler entwerfen? Für Aufgabe d) fehlt mir die Information über den geschlossenen Kreis. Wie bestimme ich diesen? Über produktive Denkanstoße wäre ich sehr Dankbar MfG Manfred