Hallo zusammen, ich habe einen Motor namens "Motorcraft Outrunner brushless Motor BO 4560/12" und möchte diesen für ein Projekt verwenden. Allerdings konnte ich im Internet kein DB finden, mein Recherche hat ergeben, dass dieser wohl im Modellbaubereich vertreten sei. Frage: Kennt jemand diesen Motor, hat im Idealfall ein Datenblatt für mich oder kennt generell einen Regler der den Motor fahren kann? Ich möchte mit dem Motor einen Demo aufbauen, wie sich ein Elektromotor bei verschiedenen Lasten (Schwungmassen) verhält. (Ein-/Überschwingen der Regelung) Falls jemand einen alternativen Motor ~500W - 1kW kennt, der im Idealfall mit einem Nucleo IHM08M1 betrieben werden kann, wäre ich ebenfalls dankbar. Danke für Eure Hilfe! MfG
Das scheint wirklich nicht so einfach zu sein. Es gibt einen Bürstenmotor namens Makita 4560, der ist es also sicher nicht. Und einen Modellbaumotor RIMfire GPMG4560 mit 160 Watt https://www.freakware.de/p/rimfire-400-brushless-motor-950kv-electrifly-gpmg4560-a98512.htm Mach ein Foto
"Modelcraft" ist IIRC die Modellbau-Hausmarke von Conrad. Schreib da doch einfach mal in freundlichem Tonfall hin...
ein Kollege las immer "Huckes Eierkraft" statt Hughes Aircraft. Ich kenne von Conrad nur Voltcraft, aber lasse mich gern belehren.
Äh, das nützt natürlich nix, wenn statt "modelcraft" an dem Motor "Motorcraft" dransteht... Nee, dann war mein Tipp mit Conrad sinnlos.
https://www.ebay.com/itm/Speed-ORM-4560-12-12T-Outrunner-Brushless-Motor-473rpm-V-/261802398957?_trksid=p2349526.m4383.l4275.c1#viTabs_0 ist es vielleicht so Einer?
Matthias L. schrieb: > Äh, das nützt natürlich nix, wenn statt "modelcraft" an dem Motor > "Motorcraft" dransteht... Ob das wirklich auf dem Motor draufsteht? Mit der Typenbezeichnung und "modelcraft" findet Google einige Hinweise, und auch der Titel dieses Threads enthält ein klar lesbares Modelcraft. Dein Ratschlag war also schon passend. Christoph db1uq K. schrieb: > Ich kenne von Conrad nur Voltcraft, Conrad hat diverse Eigenmarken, die wahlweise auf "-craft" oder "-force" enden, aber allesamt irgendwie diesen haut-gout des leicht ... conradigen mit sich tragen. Aktuell werden "Voltcraft", "Toolcraft" und "renkforce" von Conrad selbst als Eigenmarken aufgelistet, "Modelcraft" taucht zwar in der Liste der Eigenmarken nicht auf, wird aber für viele Produkte genutzt. Andere "-force"-Varianten fallen mir glücklicherweise gerade nicht ein.
Angehängte Dateien:
-

DB-456012.jpg
200 KB -

Motor1.jpg
32 KB -

Motor2.jpg
27 KB
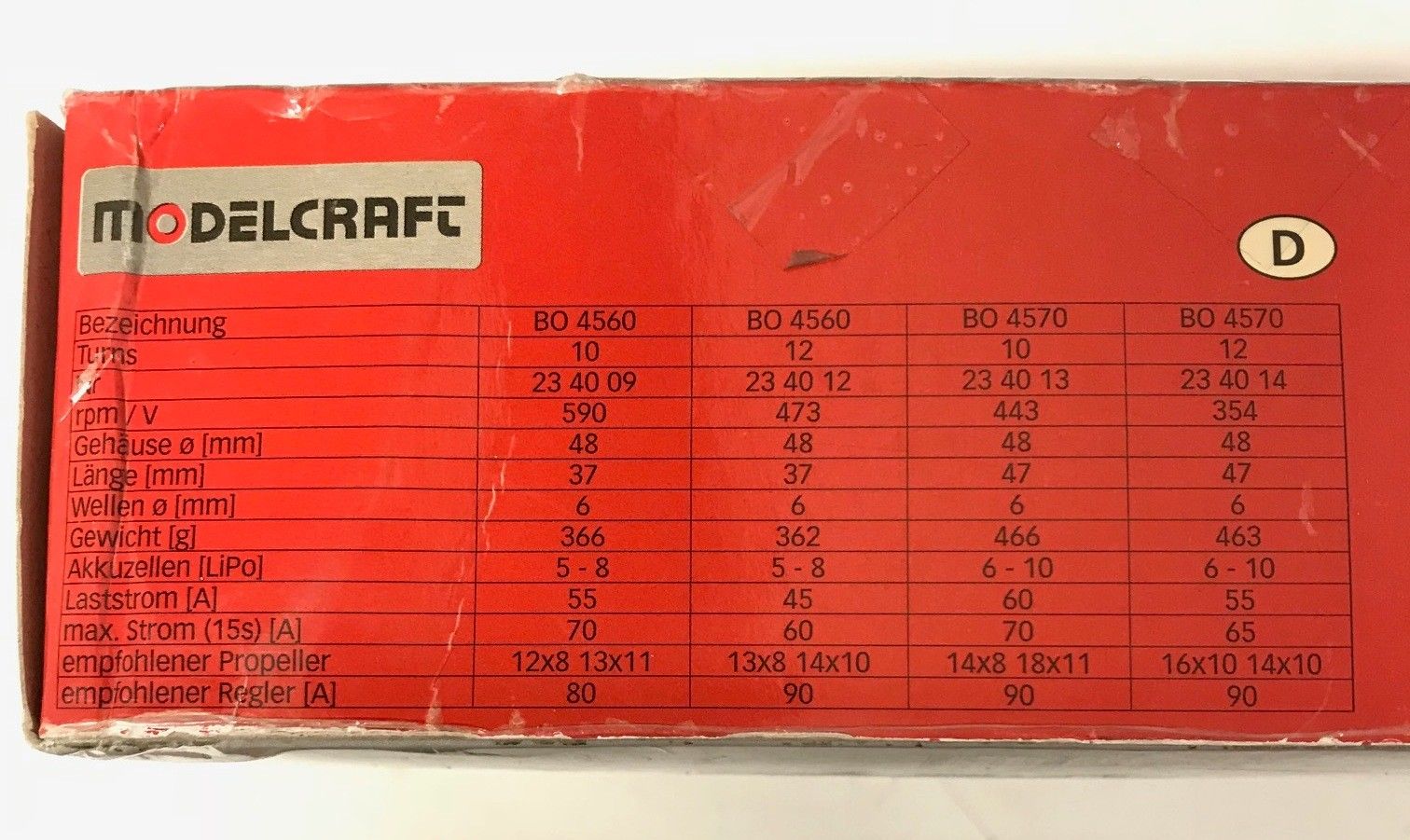


Ich habe mit einem Verkäufer auf Ebay Kontakt aufgenommen und folgendes "Datenblatt" erhalten: (siehe Anhang) DB-4560/12 Anscheinend ist das eine Baureihe mit ver. Baugrößen / Polen. Sieht für mich jedoch eher nach China aus und nicht nach was offiziellem von einem namhaften Hersteller. Anbei auch noch Bilder von dem Motor wie er vor mir liegt, ich entschuldige mich für die Fotografie, ist halt rund das Ding :-)
Leo45 schrieb: > Sieht für mich jedoch eher nach China aus und nicht nach was > offiziellem von einem namhaften Hersteller. Ist es ja auch, aber halt von Conrad importiert und unter eigenem Namen verkauft. Soviel steht fest.
Lt. der Packung ist der Laststrom für Dein Modell max. 45A. Beim Nucleo ist allerdings angegeben: 15 A(RMS) output current Passt das zusammen?
Wieviel Watt hat das denn? Ich sehe nur den Strom und die Anzahl der LiPo-Zellen. Dazu eine seltsame Maßeinheit "rpm/V", sollen das Umdrehungen pro Minute pro Volt sein? Wikipedia sagt zu LiPo: Nennspannung von 3,6 V. Für 5 Zellen und 45A wären das 810 Watt, bei 8 Zellen 1296 Watt.
Also doch modelcraft. Bei Conrad anfragen... Christoph db1uq K. schrieb: > Dazu eine seltsame Maßeinheit "rpm/V", sollen das > Umdrehungen pro Minute pro Volt sein? Ich bin auch nicht der Brushless-Spezialist, aber IIRC ist die Angabe nicht "seltsam", sondern gibt das typische Delta an Drehzahl pro Volt Betriebsspannung an, wenn man den BLDC nicht als Drehstrommotor versteht, sondern als Gleichstrommotor, der nur elektronisch kommutiert ist.
Naja, das ist ein normaler Modellflugmotor. Der Schrift nach ("Stop" von
Linotype, war in den 80ern futuristisch) ein älteres Schätzchen.
Derlei gibt es wie Sand am Meer z.B. bei Hobbyking.
Die Daten hast Du in der schönen roten Tabelle, mehr wirst Du kaum
finden. Die rpm/V ist die Angabe für die Gegen-EMK (oder Back-EMF), 436
rpm/V meint, dass Du mit 10 V auf 4360 U/min Leerlaufdrehzahl kommst.
Er hat die üblichen Eigenschaften: Für Kurzzeitbetrieb gedacht, braucht
gute Lüftung (Propeller), eher kurze Lebensdauer, keine Hallsensoren. Du
musst also sensorlos kommutieren (kein Problem mit Propeller, für alles
andere anspruchsvoll).
Das IHM08M1 ist nur ein Board mit Endstufe drauf, kein Motorcontroller.
Da fehlt noch ein Prozessor (STM32F4 wäre mein Liebling) und die
Software dazu. Willst Du eine Motorsteuerungssoftware entwickeln? Du
schreibst etwas von Regelung - da kommt noch ein Encoder dazu?
- Martin
Martin schrieb: > Das IHM08M1 ist nur ein Board mit Endstufe drauf, kein Motorcontroller. > Da fehlt noch ein Prozessor (STM32F4 wäre mein Liebling) und die > Software dazu. Willst Du eine Motorsteuerungssoftware entwickeln? Du > schreibst etwas von Regelung - da kommt noch ein Encoder dazu? Korrekt ja, zur Steuerung habe ich einen STM32F302R8 bereits da, funktioniert mit kleinerer Endstufe und an kleinerem Motor auch schon. Zwar nicht so einfach wie von ST angegeben mit Plug and Play aber es funktioniert. Als nächsten Schritt würde ich gleiches mit der größeren Endstufe auf besagtem Motor probieren. Deswegen die ursprüngliche Frage nach Datenblatt etc. 2. Teil ist auch so. Die Motorsteuerung soll in der Lage sein Drehzahl-geregelt zu fahren, daher habe ich einen Encoder von Lenord+Bauer mit ich glaube 20bit Auflösung. Kennst du dich mit der Programmierung von den ST Boardsaus? Ich habe bisher nur die grafische Oberfläche "Motor Control Workbench" verwendet, dort kann ich denke ich aber nicht das machen, was ich letztendlich brauche. Der erzeugte C-Code ist so umfangreich, dass ich das kaum überblicken kann ohne wochenlange Einarbeitung.
Was den Motor betrifft: Wird er sich drehen: ja. Darüberhinaus musst Du Deine Anforderungen spezifizieren. Normalerweise legt man die fest (Drehmoment, Drehzahl) und sucht den passenden Motor. Das erfordert natürlich ein brauchbares Datenblatt, wie hier z.B. https://de.nanotec.com/produkte/651-db87l01-s/ Leo45 schrieb: > Kennst du dich mit der Programmierung von den ST Boardsaus? Was willst Du wissen? Was willst Du erreichen? Wie ist Dein Budget (Zeit, Geld)? Wie ist dein Wissensstand? Was die Motor control library von ST betrifft: Hab auch mal kurz reingeschaut. Sehr viele Funktionen, aber wenn man etwas spezielleres braucht, ist man aufgeschmissen - wie Du schon festgestellt hast. Zumal ich gar nicht sicher bin, ob der Quellcode der Library überhaupt offen liegt. Für meine Anwendung habe ich mit einem Kollegen zusammen ein FOC selber implementiert. - Martin
Im ersten Schritt würde es mir reichen mit dem Motor drehzahlgeregelt zu fahren --> ich suche also eine Möglichkeit am besten in der grafischen Oberfläche von der Motor Control Bench meinen Geber anzubinden, eine Schaltfläche für den Drehzahlsollwert zu erstellen und dann die Firmware zu exportieren und auf mein F302R8 zu flashen. Bringt die Oberfläche (Motorcontrol bench) das mit? Falls nicht (was ich befürchte) müsste ich den Firmwarecode selber umschreiben um mein Feedback an einem Analogeingang einlesen. mein Geber löst die 360° auf +-10V auf. Ggf. dann mit Spannungsteiler runterteilen, damit mein IO nicht abraucht... Das sollte bis Ende 2018 laufen. Budget bin ich frei, hab den Großteil der Hardware ja bereits. Falls die Lösung nicht grafisch nativ in der ST-Umgebung geht, erscheint mir die Deadline sowieso unrealisitsch, da ich mich dann in den für den STM32 exportierten Firmwarecode einarbeiten müsste, wie bereits erwähnt sind das mehrere 1000Zeilen + Bibliothek. Kenne mich gut mit C/C++ aus, habe schon Arduino programmiert etc. Das ganze ST-Zeug ist mir komplett neu. Daher eher die Fragen in Richtung ST-Workbench
Hallo Leo45, das Motor control SDK kenne ich nur flüchtig. Habe eben ins "Getting Started" reingeschaut. https://www.st.com/content/ccc/resource/technical/document/user_manual/group0/ba/91/77/2e/0e/4c/4c/74/DM00484271/files/DM00484271.pdf/jcr:content/translations/en.DM00484271.pdf Auf Seite 21 sieht man ein GUI, das genau das machen sollte, was Du willst. Leo45 schrieb: > mein Geber > löst die 360° auf +-10V Das hört sich seltsam an. Drehgeber sind idR inkremental (oder auch absolut) mit Digitalausgang, entweder basic A/B/I oder mit einem Encoder-Busprotokoll. Was die Software von ST betrifft scheint es verschiedene Versionen zu geben, einmal die MC-Library und neu das X-Cube-MCSDK. Welche Variante was kann...? In jedem Fall würde ich mich versuchen, so nah wie möglich an eine direkt unterstützte (IDE, STM32-Board) HW-Konfiguration zu halten, wenn es schnell gehen soll. So wie es ich anhört hast Du auch noch keine IDE, das steht Dir also auch noch bevor. Auf die Schnelle scheint sich Atollic anzubieten, kenne ich allerdings nicht (ich arbeite mit IAR).
Anbei ein Link zum Datenblatt von meinem Geber: ich habe die Variante mit analoger Ausgangsspannung 0..10V. https://www.lenord.de/fileadmin/kundenbereich/produkte/gel2351/ti2351_e.pdf Das „Getting Started“ habe ich schon mal durchgeführt und getestet. Allerdings mit einem kleinen Drohnenmotor der im Beispiel explizit unterstützt wird. Die Schritte sind auch in einem YT-Tutorial erklärt, habe mich also an das Original von ST gehalten. Analog werde ich jetzt einfach mal den großen Motor anschließen und schauen ob ich was zum drehen kriege. Melde mich dann wieder wenn Probleme auftreten. Vielen Dank nochmal für die schnelle und rücksichtsvolle Hilfe Leon
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.