Moin, für die Steuerung eines Regelventils wird ein Schrittmotor gesucht, der mit einem Arduino angesteuert werden soll. Voller Regelbereich sind nur drei Umdrehungen. (Und nein, leider kann man so etwas nicht fertig kaufen.) Zwei Motore wurden bisher getestet (ohne Last) - Stepper 28BYJ-48 5V mit Treiberplatine ULN2003 - der Trinamic PD57 mit Treiber Trinamic 1161 Der Trinamic ist natürlich toll und bietet eine Menge Konfigurationsmöglichkeiten (der Treiber kann per Assembler programmiert werden), aber das Ding ist ein Klotz (da muß die Mechanik entsprechend stabil ausgelegt werden) und braucht ziemlich hohe Ströme. Leider ist er auch ziemlich teuer ca. 180 Euro und es werden vier bis sechs Stück benötigt. Der kleine Stepper 28BYJ-48 kostet samt Treiberplatine keine 5 Euro und könnte von der Kraft und der Geschwindigkeit - dank Untersetzungsgetriebe - fast genügen. Allerding wirkt er schon sehr filigran, so daß doch leichte Zweifel an der Lebenserwartung aufkommen. Ideal wäre ein Stepper, etwas größer als der 28BYJ-48, samt Steuerungsplatine, der stabiler ist und vielleicht nicht mehr als 50 Euro pro Stück kostet. Vielleicht hat jemand einen Praxistip für mich.
Die allseits beliebten NEMA's? In Kombination mit dem DRV8825 hängt das Teil auch in den meisten 3D-Druckern
Hallo Chris, was sind denn die "allseits beliebten Nemas"? Nema ist eine amerikanische Standardisierungsorganisation [1]. "Nema 17" und "Nema 23" sind genormte Baugrößen für Schrittmotoren, keine Hersteller- oder Artikelbezeichnungen [2]. Mit freundlichen Grüßen Thorsten Ostermann [1] https://de.wikipedia.org/wiki/National_Electrical_Manufacturers_Association [2] http://www.schrittmotor-blog.de/nema-schrittmotor-was-ist-das-eigentlich/
Hallo Svensson, ist das eine kommerzielle (Serien)-Anwendung, oder ein privates Projekt? Muss der Treiber unbedingt auf dem Motor sitzen, oder können Motor und Treiber auch getrennt sein? Und wie soll das ganze gesteuert werden, über einen µC, eine SPS,...? Mit freundlichen Grüßen Thorsten Ostermann
Hallo Thorsten, das ist für ein wissenschaftliches Experiment. Gebraucht werden maximal 2 Stück Steuerungen -> also im Prototypenbereich. (Ist bei uns eigentlich immer so.) Jeweils ein µC (Arduino Nano) wird wohl einen Sensor auswerten und dann zwei (oder auch drei?) Motore ansteuern. Die Sensorauswertung habe ich heute getestet, funktioniert. Fehlt noch eine kleine Datenloggerfunktion, aber das ist softwaretechnisch wohl kein Problem. Die ganze Regelstrecke ist sehr träge, d.h. eine Messung alle 5 Minuten dürfte reichen. Damit ist der µC dann massiv unterfordert. Natürlich könnten Motor und Steuerung auch von einander getrennt sein. Es wäre nur ganz praktisch, wenn die Ansteuerung möglichst einfach vom µC erfolgen könnte. Die beiden oben genannten Kombinationen erfüllen diesen Wunsch.
Hallo Thorsten, am einfachsten und günstigsten ist es, einfach eine RAMPS wie sie in jedem 3D-Drucker verbaut ist, zu kaufen. gesteuert wird sie mit GRBL.
Moin, den PD57 habe ich auch schon mit dem "Motor-Shield" von Velleman betrieben. Das geht aber mehr schlecht als recht, denn der Motor läuft sehr rauh und zieht unheimlich viel Strom (bis 4A), so daß die Treiber heiß werden. Was ich noch vergaß zu schreiben: natürlich soll/muß das Ganze bis Ende Januar betriebsbereit sein, was bedeutet, daß ich nicht zu viele Sackgassen einschlagen darf. ;-))
Scheibenwischermotoren werden für solche Aufgaben auch gern genommen. Wenn du keine Zwischenschritte brauchst und die Endschalter selbst baust...
Da scheint ein Mißverständnis vorzuliegen. Das Regelventil wird immer nur in Teilen von einem Grad auf- oder zugedreht, da die Zielgröße 500 ppm (Teile pro Million) beträgt. Daher sollen eben Schrittmotore - oder alternativ Getriebemotore mit großer Untersetzung - verwendet werden. Schon die Sensoren sind unglaublich träge T90 = 5 min und haben nur eine Genauigkeit von 50 ppm. Letztlich geht es wohl nur darum, sich langsam ändernde Umweltbedingungen (vor allem wohl Luftdruck und Druck der Gasflaschen) auszugleichen. Bisher wird das händisch gemacht, soll aber automatisiert werden, weil es so viel Zeit kostet.
wie schon erwähnt, nimm ein DRV8825 oder A4988 (oder ein anderes modell) als Treiber, such nach "3D printer stepper driver" ein beliebiger Nema17 könnte reichen 1.8° Schrittwinkel 120-500 mNm torque 0.5-2A 12V im Mittel, such halt einen der deinen Anforderungen genügt. gibts für billig aus China, für wenig mehr aus Deutschland (wenns schnell sein muss). svensson schrieb: > den PD57 habe ich auch schon mit dem "Motor-Shield" von Velleman > betrieben. wenn das eins mit L298 ist, ist dass schon etwas veraltet (BJT Treiber), ein neuer Treiber mit Mosfet wird u.U. nicht so warm. total Drop beim L298 bei 2A sind 4.9V, das macht fast 10W die der verheizt, das geht besser.
Moin, hier die Rückmeldung - könnte vielleicht den einen oder anderen interessieren. Es sind die Trinamic PD42-2 mit dem angebauten Treiber Trinamic 1060 geworden. Zu dieser Kombination aus Schrittmotor und Treiber ist folgendes zu sagen. - Selbst mit einem Ruhestrom von nur 40mA@12V (einstellbar) hat er noch eine erstaunliche Haltekraft. - Durch den geringen Ruhestrom findet nahezu keine Erwärmung im Haltebetrieb statt. - Der Schrittmotor ist erstaunlich leise und steppt sehr sanft. - Microstepping bis 256 Schritte ist möglich. - Es existiert eine Schnittstelle für die direkte Kommunikation mit einem µC über per eingebauten Optokopplern. Für Anwendungen, die keine Haltekraft benötigen, kann der Treiber auch ganz abgeschaltet werden. - Der Motor kann über 5V-TTL konfiguriert und ggf. auch gesteuert werden. Alternativ sind die Schnittstellen 232 und 485 erhältlich. Wir haben ein USB-TTL (3 polig) Kabel mit FTDI232R benutzt. Nachteilig gegenüber dem größeren Treiber 1161 ist, daß sich keine kleinen Programme per Assembler speichern lassen. Dafür ist die Optokopplerschnittstelle sehr praktisch, an die direkt die DIO des Arduino angeschlossen werden können. So ein Motor/Treiber kostet etwa 87 Euro bei R. Da wir aber doch nur zwei Stück statt der geplanten vier bis sechs benötigen, war der Preis okay.
Angehängte Dateien:
-

Gasregler_fertig.png
370 KB
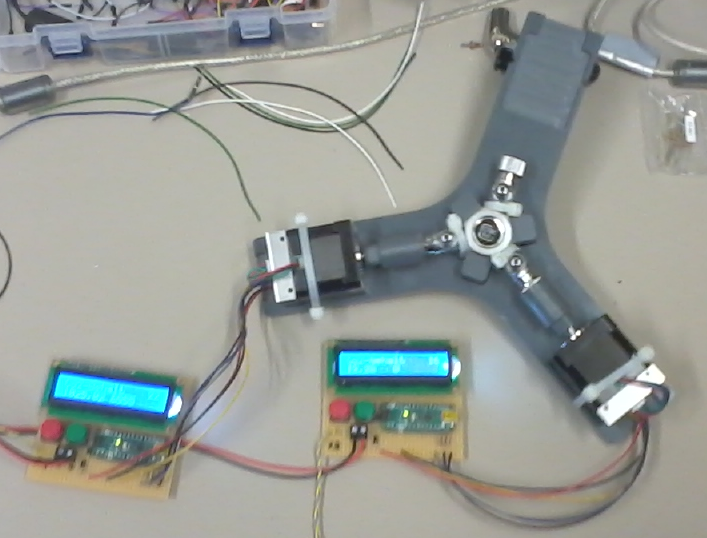
Moin, inzwischen scheint das Ding seinen Zweck zu erfüllen. Im Anhang ein Bild, wie man sich das Ganze vorzustellen hat. Inzwischen sind beide Motore an einem Regler gelandet. Zwei Steuerungen für zwei Motore war die Vorgabe (ich hätte es mit einer gemacht). Die Nutzer haben meine Anregung "Einbau in ein Gehäuse" durch zwei Gefrierbeutel umgesetzt. ;-))
svensson schrieb: > Gasregler_fertig.png Was mag wohl der Hinweis auf die Bildformate bedeuten? Für ein Photo ist PNG denkbar ungeeignet. Bei einer derart matschiges Aufnahme zeugt es von absoluter Inkompetenz, sorry.
Die "matschige" Aufnahme liegt an der Kamera, leider habe ich keine bessere Aufnahme. Fokussiert ist hier auf den Regler und den linken Schrittmotor. Und den Hinweis hatte ich so verstanden, daß PNG und GIF immer gehen, JPG nur für Fotos und Scans.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.