Hi, ich benötige einen Servo, der möglichst schnell UND stark ist und so langlebig wie möglich. Konkret geht es um eine Maschine, in der der Servo ca. im Sekundentakt ein 1kg-Gewicht möglichst schnell heben und gleich wieder senken soll. (Anhebung um 1mm innerhalb von 0.2 Sek.) Mir ist schon klar, dass Kraft und Geschwindigkeit in einem gewissen Abhängigkeitsverhältnis stehen. Ich habe hier auch teilweise Einfluss, weil ich einen Hebel anlegen kann. Ich habe keine Servo-Erfahrungen und mich würden u.a. folgende Punkte besonders interessieren: 1. Wie lange hält ein Servo im Schnitt bzw. wie groß sind die Haltbarkeitsunterschiede zw. einem Servo um 20 und einem um 100 EUR? 2. Sind für solche Leistungs-Ansprüche generell 7.4V-Servos oder 6V. besser, oder gibt es bei beiden Varianten welche, die das schaffen? 3. Digital, analog, oder in diesem Zusammenhang egal?
Vielen Dank für den Tipp, hinz. Ich habe in meiner Maschine bisher genau mit einem Hubmagnet gearbeitet, weil der natürlich im Prinzip genau das macht, was ich brauche. Auf Dauer hat sich aber ein Nachteil bemerkbar gemacht, nämlich dass er zu schnell schaltet, was in Kombination mit der relativ starken Hubkraft zu einem lauten Klacken bzw. Vibrationen führt. Ich habe auch mit mechanischer Dämpfung experimentiert, aber mir ist nichts gelungen, was einerseits effizient dämpft und andererseits sich nicht relativ schnell wieder abnützt. Ich habe auch versucht, dem Magneten mittels pwm eine gewisse Weichheit im Schaltvorgang "beizubringen", das problem ist aber, dass er zur Überwindung der mechanischen Trägheit einfach die volle Leistung braucht. Ich konnte lediglich nach erfolgreicher Anhebung des Gewichts mittels pwm die Leistung drosseln, das Klacken selbst muss aber so hart bleiben. Der Servo ist zwar wieder fast auf der langsamen Kante, dafür deutlich "smoother". Wenn ich mal davon ausgehe, dass er gerade noch schnell genug ist, spricht sonst etwas gegen den Servo? hinz schrieb: > https://www.red-magnetics.com/de/
Beitrag #5694965 wurde von einem Moderator gelöscht.
Angehängte Dateien:
-

IMG_2516.JPG
220 KB
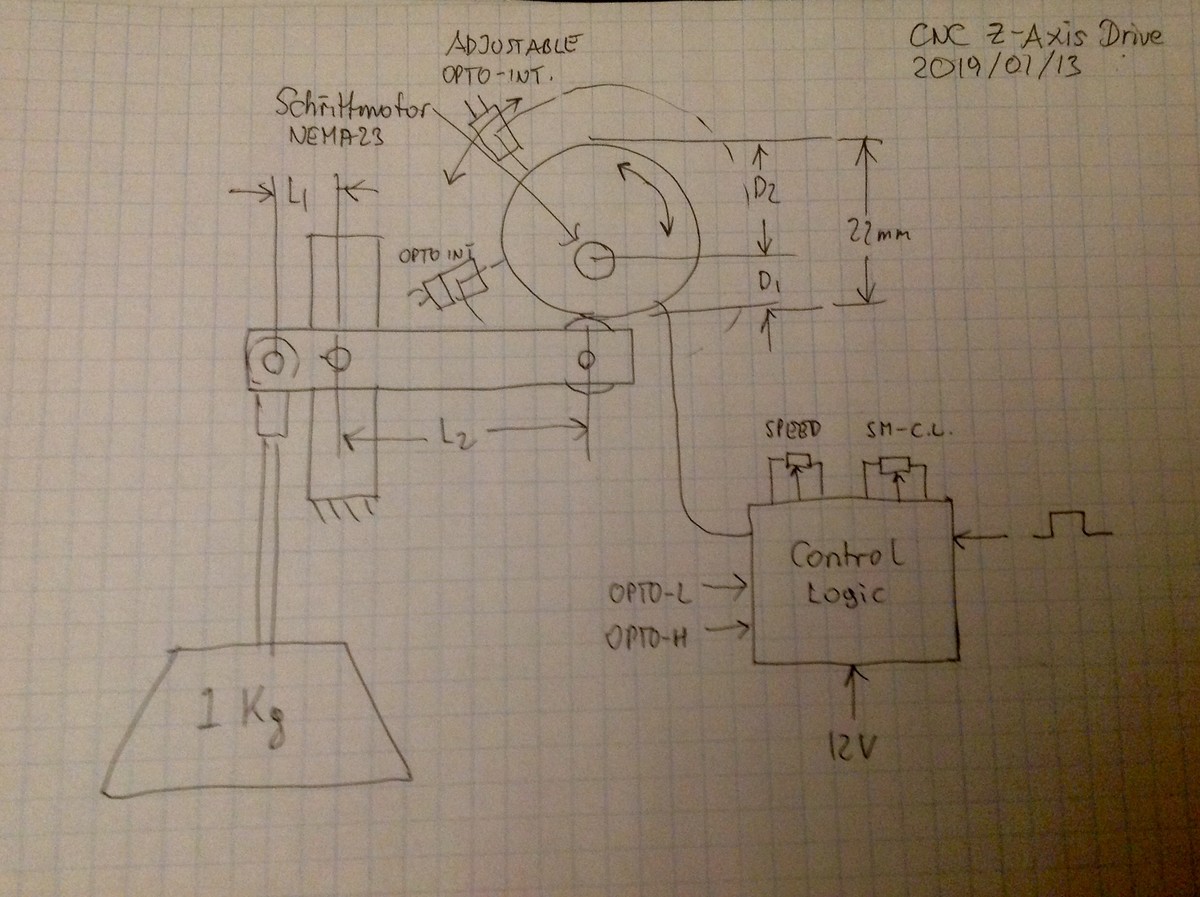
Hast Du schon mal an einen exzentrischen Scheiben Antrieb mit Abtasthebel mit einem Geschwindigkeitsprofil wie 0-90 Grad eines Sinus gedacht? Das hätte den Vorteil, daß der Anfahrdrehmoment fast gleich Null ist und der Drehmoment nur langsam bis zum Maximum bei 45 Grad ansteigt und dann am oberen Totpunkt wieder ein Minimum erreicht. Da dürfte sogar ein kleinerer (Schritt) Motor ausreichen. Dieses Prinzip habe ich für die Z-Achsen Bewegung meiner CNC Graviermaschine angewendet und bringe bis zu 2kg an Kraftübertragung über ungefähr 8mm Hub. Ein NEMA23 Schrittmotor treibt die Anordnung an. Optische End Sensoren bestimmen den erlaubten Hub. Ich entwarf eine spezielle Steuerelektronik, die am Eingang nur ein L/H bekommt. Die Steuerlogik steuert ein L297/298 Schrittmotor Chipset an. Die Drehrichtung ändert sich beim runterfahren um den Hub einstellbar zu machen. Das Exzenter Rad hat einen Durchmesser von rund 22mm und die Distanz vom Zentrum ist so gewählt, daß der notwendige Hub erreicht wird. Die Kraft wird über ein 5cm langes Hebelgestänge übertragen. Der Hebel hat für lange Lebensdauer ein kräftiges Kugellager am Abtastende. In der Praxis läuft diese Anordnung etrem leise und zuverläßig. Im Bohrbetrieb kann ich bis zu über 150 komplette Hübe in der Minute erreichen. Allerdings haben sich im praktischen Bohrbetrieb zwischen 50-80 Hübe pro Minute bewährt um zu vermeiden, daß die Bohrer gestoßen werden. Man hört außer dem leichten Summen des Schrittmotors keine Klackgeräusche. Die Geschwindigkeit läßt sich mit einem Poti einstellen. Heutzutage könnte ein uC die Steuerung erledigen. Ich baute das um 1995 herum und hatte noch keine Erfahrung und Zugang mit uC. Jedenfalls hat die Vorrichtung schon mindest eine Million Operationen hinter sich. Die Lebensdauer dürfte eine hundert Millionen Zyklen betragen. Das Bohrgeschwindigkeitsprofil ist so sanft, daß mindesten bis 0.13mm Bohrdurchmesser ohne Schaden verwendet werden können. Der Bohrer trifft auf die LP im 30-60 Grad Bereich des Profils. In zwanzig Jahren ist mir kein einziger Hartmetall Bohrer gebrochen. Denke es mal für Deine Anwendung durch. Es könnte durchaus eine geeignete Lösung für Deine Anwendung darstellen. Für mich war das eine optimale Lösung.
Hallo Gerhard,
Danke für deine ausführliche Schilderung deines Setups -ich finds
genial, v.a., weil es sich bei dir in der Praxis bewährt hat! Ich hab
mir das mit dem Schrittmotor auch schon mal überlegt. Es wäre auf diese
Weise natürlich billiger und vielleicht auch robuster, bei mir spricht
aber ein Platz- und Gewichtproblem dagegen. Wenn ich die Daten von
Schrittmotor und Servo vergleiche, bin ich eigentlich beim Servo näher
an dem, was ich suche:
Gewicht Haltemoment Geschwindigkeit 60°
Stepper 390g 59Ncm 0,016s *)
Servo 60g 360Ncm 0,16s
bei 600U/Min.
Eventuell könnte ich einen NEMA 14 nehmen, aber der ist natürlich vom
Drehmoment her schwächer.
Der Servo in dieser Preisklasse ist zwar langsamer, für mich aber immer
noch schnell genug (und über einen Hebel bin ich schnell unter einer
1/10s und immer noch wesentlich stärker).
Von der Anwendung her wäre der Servo vermutlich passender, aber wie
schätzt du die Haltbarkeit ein? Natürlich ist der Stepper unverwüstlich
im Vergleich, aber ich hätte gerne gewusst, wo ungefähr so ein Servo
steht. Ist das jetzt komplettes Spielzeug, oder kann man schon von einer
gewissen Haltbarkeit ausgehen?
Ich habe folgende Modelle für den Vergleich verwendet:
Stepper NEMA17 2A:
https://www.omc-stepperonline.com/nema-17-bipolar-59ncm-84ozin-2a-42x48mm-4wires-w-1m-cable-and-connector-17hs19-2004s1.html
Digital-Servo 6V:
https://www.conrad.at/de/savoex-standard-servo-sa-1230sg-digital-servo-getriebe-material-metall-stecksystem-jr-453683.html
Danke, hinz. Auch nicht in einer etwas besseren Ausführung, wie z.B. dem hier? Sind "Brushless", "doppeltes Kugellager" und Metallgetriebe nur Schlagworte und er hat trotzdem keine ernsthafte Haltbarkeit? https://www.conrad.at/de/savoex-spezial-servo-brushless-servo-sb-2272mg-doppelt-kugelgelagert-getriebe-metall-jr-369318.html hinz schrieb: > Ja, weder der Motor noch das Getriebe sind auf lange Lebensdauer gebaut.
Paul schrieb: > Von der Anwendung her wäre der Servo vermutlich passender, aber wie > schätzt du die Haltbarkeit ein? Natürlich ist der Stepper unverwüstlich > im Vergleich, aber ich hätte gerne gewusst, wo ungefähr so ein Servo > steht. Ist das jetzt komplettes Spielzeug, oder kann man schon von einer > gewissen Haltbarkeit ausgehen? Das Problem mit dem Servo ist hauptsächlich der DC-Motor. Da ist Verschleiß nach langer Gebrauchsdauer unvermeidlich. Auf der anderen Seite sind die Servos billig und man kann sich ja Ersatz planen und rechtzeitig besorgen oder gleich lagern. Ausreichenden Drehmoment hat der besagte Servo. Da nur 1mm gehoben werden muss, genügt ein dünnes aufgewickeltes Stahlseil, dass sich auf einer getrennten Achse aufwickelt. Dadurch werden die Servolager trotz hochqualitativer Lager geschont. Mechanisch am besten wäre eine getrennte Lagerung für das Gewicht und der Servo nur für die Drehmoment Bereitstellung. (Auch die Servo Kugellager können unter permanenter plastischer Verformung leiden (Brinelling) und deshalb nicht für direkte Gewichtslast geeignet sein, speziell wenn sie sehr klein für eine gegebene radiale Last sind). Dann verbleibt eigentlich nur noch die Bürstenlebensdauer des DC Motors. Je geringer die Motor Last ist, desto länger wird der Motor überleben. Für ein nicht-professionelles bzw. kommerzielles Produkt möglicherweise durchaus akzeptabel. Andrerseits würde ich auf alle Fälle mit einem BLDC oder Schrittmotor geeigneter Qualität und Daten arbeiten. Bei mir nahm ich einen NEMA23 SM mit doppelten Kugellagern was sich in der Praxis für mich bewährt hat. In Deiner Anwendung hilft Dir die Hebelübersetzung den Motor zu schonen und die radiale Last geringer zu halten.
Paul schrieb: > Danke, hinz. Auch nicht in einer etwas besseren Ausführung, wie > z.B. dem > hier? Sind "Brushless", "doppeltes Kugellager" und Metallgetriebe nur > Schlagworte und er hat trotzdem keine ernsthafte Haltbarkeit? > > https://www.conrad.at/de/savoex-spezial-servo-brushless-servo-sb-2272mg-doppelt-kugelgelagert-getriebe-metall-jr-369318.html > > hinz schrieb: >> Ja, weder der Motor noch das Getriebe sind auf lange Lebensdauer gebaut. Hier sind noch ein paar Hinweise über Kugellagerverschleiß: https://en.wikipedia.org/wiki/Brinelling https://www.linearmotiontips.com/how-bearings-fail-a-closer-look-at-brinelling/ Es ist ohne Berechnungen unmoeglich vorauszusagen wie lange die Kugellager halten werden und ob der Servo für Deine radiale Last direkt geeignet ist. An sich sind die Servo Lager billig und zumeist austauschbar. Dann fragt sich ob die internen Servo Zahnräder der andauernden Belastung gewachsen sind und das Ausgangszahnrad bei dem geringen Drehwinkel nur teilweise stark abgenutzt wird. Pragmatisch gesehen, dreht es sich letztlich darum ob ein Service alle paar Jahre akzeptabel ist.
Danke Gerhard für deine Einschätzung. Das klingt für mich eher nach Ausschluss der Servo-Variante, denn die Maschine sollte über viele Jahre wartungsfrei laufen und mindestens dreihunderttausend Schaltzyklen überstehen - das schafft der Servo dann wohl eher nicht... Angenommen, ich kriege den Stepper in mein Gehäuse, welche Möglichkeiten für die Übersetzung sind empfehlenswert/robust/spielfrei? Zahnriemen? Zahnräder? Seilzug? Hebel?
Paul schrieb: > Danke Gerhard für deine Einschätzung. Das klingt für mich eher > nach > Ausschluss der Servo-Variante, denn die Maschine sollte über viele Jahre > wartungsfrei laufen und mindestens dreihunderttausend Schaltzyklen > überstehen - das schafft der Servo dann wohl eher nicht... > > Angenommen, ich kriege den Stepper in mein Gehäuse, welche Möglichkeiten > für die Übersetzung sind empfehlenswert/robust/spielfrei? > > Zahnriemen? Zahnräder? Seilzug? Hebel? Hallo Paul, könntest Du eine Skizze machen über die Anordnung der Hauptteil oder ein paar Bilder von der betreffenden existierenden Anordnung? Vielleicht fallen dann noch andere Lösungen ein. Ich würde auf alle Fälle versuchen den Motor radial zu entlasten damit die Kugellager geschont werden und eine eigene Welle für das Gewicht vorsehen. Ob direkter Antrieb möglich ist, müsste rechnerisch ermittelt werden. Allerdings musst Du beim Schrittmotor beachten, dass der Drehmoment mit steigender Drehzahl immer niedriger wird. Dann kommt noch dazu, dass sich die Rolle wahrscheinlich bei fehlender Ansteuerung oder Abschalten durch das Gewicht der Last alleine dreht und das Gewicht dann aufliegt was möglicherweise nicht gewünscht ist. Die Hebel und Exzenter Anordnung hat das Problem nicht weil die Last den Motor nicht bewegen kann. Allerdings könnte man alternativ einen selbst blockierenden Schneckenantrieb erwägen. Ein Schneckenantrieb mit niedrigen Übersetzungsverhältnis (wegen der Drehzahl), mit einer Kurbelwelle versehen(Exzentrischer Stift eingelassen) könnte ohne Hebel die Last heben wenn der Durchmesser des Exzenter Umfangs kein Problem ist. Diese Anordnung ist auch selbst blockierend. Vielleicht ist Dir das nicht wichtig. Eine Lösung Deines Problems lässt sich pauschal nicht so leicht definieren. Vielleicht sollen sich mal die Mechanik Ingenieure im Forum melden und ihrerseits Vorschläge machen. Bin ja nur ein "Farmboy" und kein mechanischer Entwickler:-)
Angehängte Dateien:
-

Scan_12.jpeg
100 KB -

Scan_13.jpg
160 KB
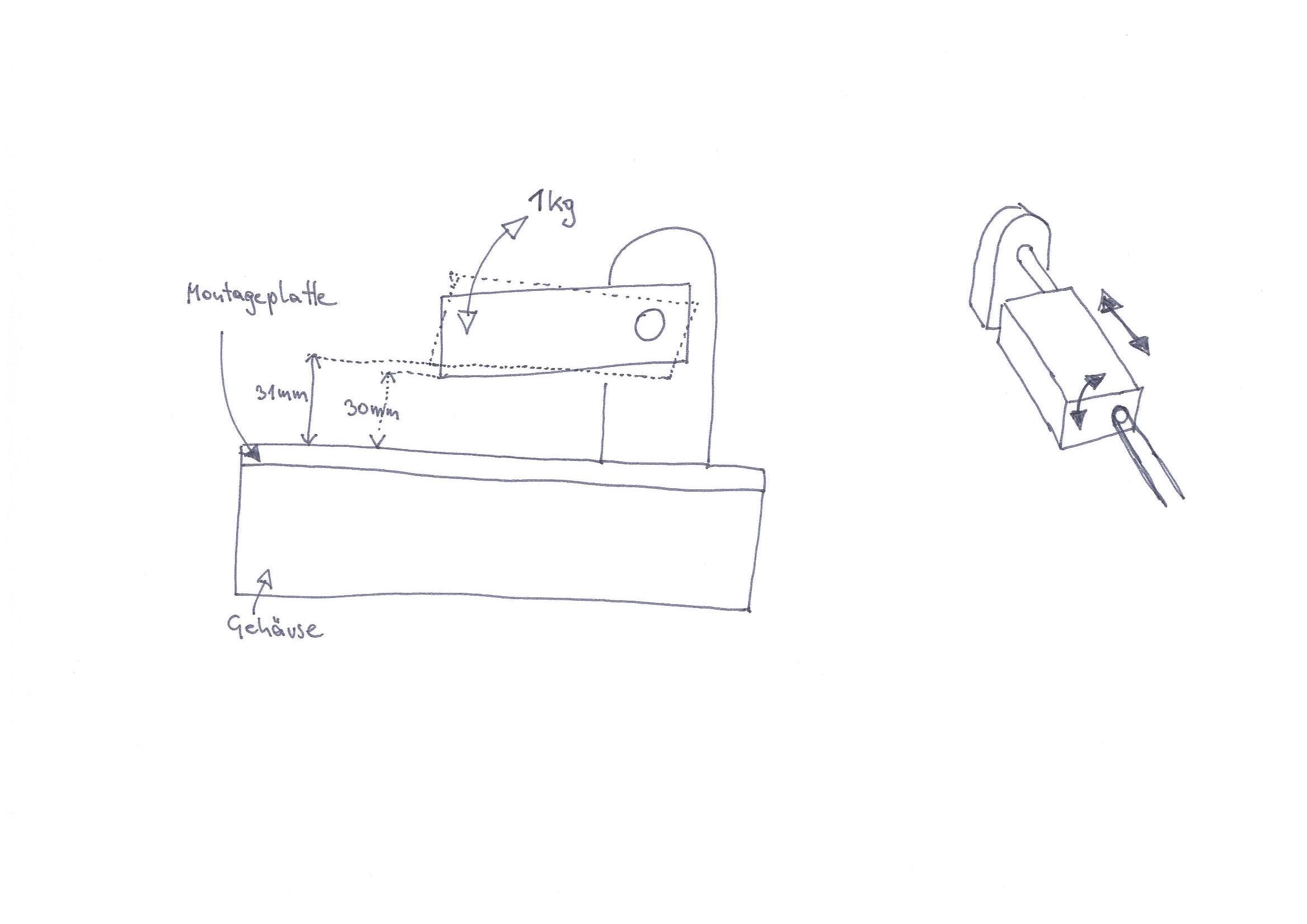
Das 1kg-Gewicht bewegt sich auf einem Linearlager hin und her und soll gleichzeitig sehr schnell um die besagte Höhe von 1mm angehoben werden können. Bisher habe ich es mit einem Magnetheber gemacht, der parallel zur Linearbewegung des Gewichts angeordnet war gemacht (siehe 2. Skizze)
Angehängte Dateien:
-

Entwurf1.jpg
160 KB
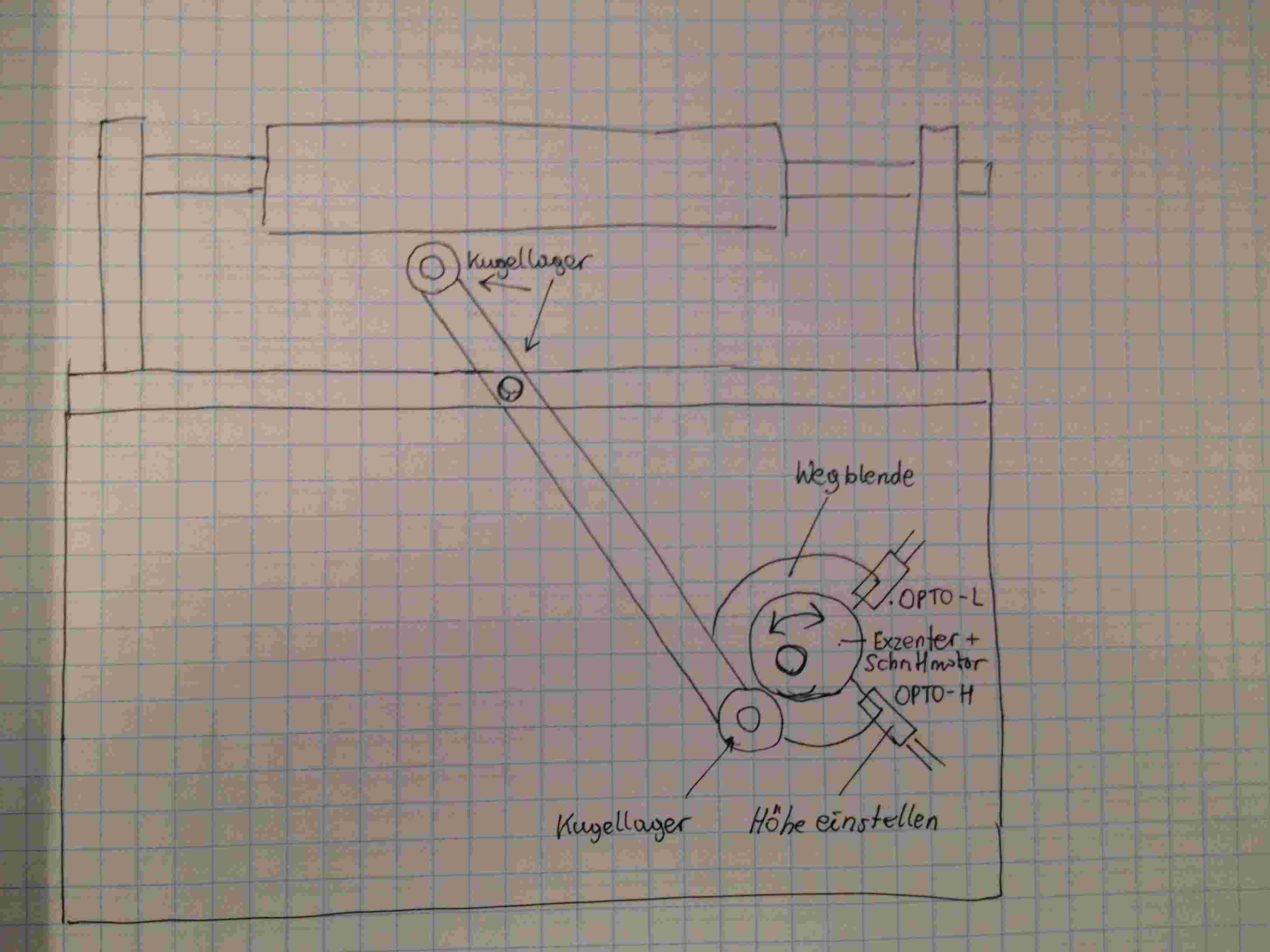
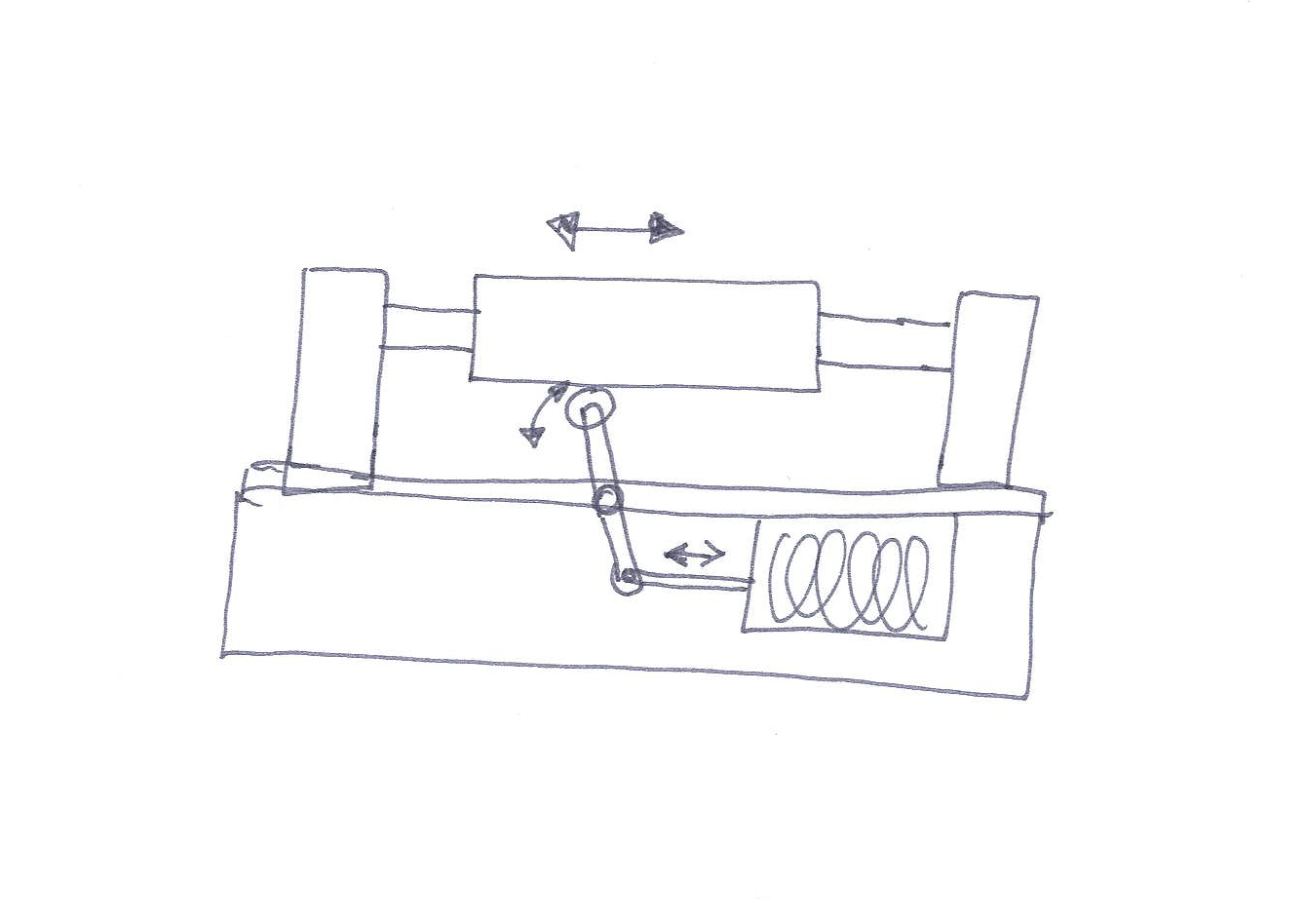
Paul schrieb: > Das 1kg-Gewicht bewegt sich auf einem Linearlager hin und her und > soll > gleichzeitig sehr schnell um die besagte Höhe von 1mm angehoben werden > können. Bisher habe ich es mit einem Magnetheber gemacht, der parallel > zur Linearbewegung des Gewichts angeordnet war gemacht (siehe 2. Skizze) Paul schrieb: > Das 1kg-Gewicht bewegt sich auf einem Linearlager hin und her und > soll > gleichzeitig sehr schnell um die besagte Höhe von 1mm angehoben werden > können. Bisher habe ich es mit einem Magnetheber gemacht, der parallel > zur Linearbewegung des Gewichts angeordnet war gemacht (siehe 2. Skizze) Wenn ich es mir noch einmal überlege würde ich die Hebelanordnung beibehalten und den Magneten mit dem Schrittmotor und Exzenter auswechseln. Eine auf dem Exzenter aufgebrachte Blendscheibe und zwei Opto-Interrupter dienen zur Wegbegrenzung. Ein uC kann alles erledigen. http://ocw.metu.edu.tr/pluginfile.php/6886/mod_resource/content/1/ch8/8-3.htm http://www.technologystudent.com/cams/cam10.htm Wenn das Hebelverhältnis gross ist, dann brauchen die Motorlager auch nicht viel radiale Last aushalten. Feder wird kaum notwendig sein wenn der Winkel einigermassen stimmt. Bei der Hebelachse genügt eine gesintertes Bronzelager. Ich sehe einen großen Vorteil im Exzenter durch den niedrigen Anfahrdrehmoment und an- und absteigende Kraftübertragung. In beiden Totpunkten ist der Drehmoment minimal. Da brauchst Du nicht einmal ein trapezförmiges Schrittmotor Geschwindigkeitsprofil. Ein Mikroschalter mit Rollen-Fuehlhebel Taster für die Rastposition könnte die Blendscheibe und die Optos ersetzen. Der uC weiss ja wieviel Schritte gefahren werden müssen. Dieser Mikroschalter reagiert dann auf die Minimalposition am Exzenter. Da brauchst Du nicht einmal viel Neues dazu bauen. Einen Motorwinkel auf die Unterplatte schrauben. Kleine Proto-boards für die Optos, mit einer Schere fertigst Du eine Kartonblendscheibe an - Fertig. Etwas uC programmieren und die Sache sollte testfaehig sein. Durch verschieben des Opto-H kannst Du die Weglänge genau einstellen.
Danke, Gerhard, geniale Idee, den Hebel über Exzenter zu betätigen. Ich hatte immer an eine Lösung über Keilriemen oder Zahnräder gedacht, die Exzenter-Variante ist aber noch viel eleganter:-). Bezüglich Optos und Schrittmotorsteuerungen habe ich alle Möglichkeiten, auch eine Rampe kann ich fahren, falls notwendig:-) Ich werde mich ans Werk machen und berichten...
Paul schrieb: > Danke, Gerhard, geniale Idee, den Hebel über Exzenter zu > betätigen. Ich > hatte immer an eine Lösung über Keilriemen oder Zahnräder gedacht, die > Exzenter-Variante ist aber noch viel eleganter:-). Bezüglich Optos und > Schrittmotorsteuerungen habe ich alle Möglichkeiten, auch eine Rampe > kann ich fahren, falls notwendig:-) > Ich werde mich ans Werk machen und berichten... Noch auf? Bitte berichte. Dein Projekt hält mich neugierig. Darfst Du Näheres über die Anwendung berichten? Oder ist das ein Demo irgendeiner Art? Jedenfalls, gut Geling!
Paul schrieb: > Danke, Gerhard, geniale Idee, den Hebel über Exzenter zu > betätigen. Ich > hatte immer an eine Lösung über Keilriemen oder Zahnräder gedacht, die > Exzenter-Variante ist aber noch viel eleganter:-). Bezüglich Optos und > Schrittmotorsteuerungen habe ich alle Möglichkeiten, auch eine Rampe > kann ich fahren, falls notwendig:-) > Ich werde mich ans Werk machen und berichten... Eine Rampe sollte überhaupt nicht notwendig sein weil der Motor beim Anfahren wegen der sanft ansteigenden Drehmomentkurve kaum Kraft aufwenden muß. Bei mir war es überhaupt nicht notwendig und der Motor läuft mit herunter geregelten Strom.
Mal ein paar Zahlenspiele: Paul: denn die Maschine sollte über viele Jahre wartungsfrei laufen und mindestens dreihunderttausend Schaltzyklen überstehen 300.000 Zyklen x 0,2s ~ <20h Laufzeit Das auf viele Jahre verteilt bekommst eher Standschäden als runtergerockte Bürsten oder fressende Lager. Beim Modellbauservo erst recht. 1mm in 0,2s entspricht einer Beschleunigung von durchschnittlich 2g. Soll das Gewicht genauso schnell wieder herunterkommen? Dann wäre fallen lassen zu langsam und braucht etwas Nachdruck. Maximales Drehmoment bei 1mm Hebel übrigens 0,02Nm, mit mechanischen Verlusten gerne das 3fache. Da braucht es keine Übersetzung mit Hebeln, das kann auch ein Winzmotörchen direkt mit Exzenter. Schrittmotor, nun wenn es lageregelbar sein soll, warum nicht. Wenn es vom Gewicht nicht reicht, Faulhaber DC-Motoren mit angeflanschtem Getriebe sind an Zuverlässigkeit eine Hausnummer (und im Preis). Wichtig für geringe Mechanikbelastung ist auch eine möglichst geringe Änderung der Beschleunigung (aka "Ruck"). Da sind v.a. die Exzenterlösungen klar im Vorteil. Beste Grüße, Matze
Angehängte Dateien:
-

Drosselklappenantrieb.jpg
250 KB -

Belastungstest.jpg
100 KB
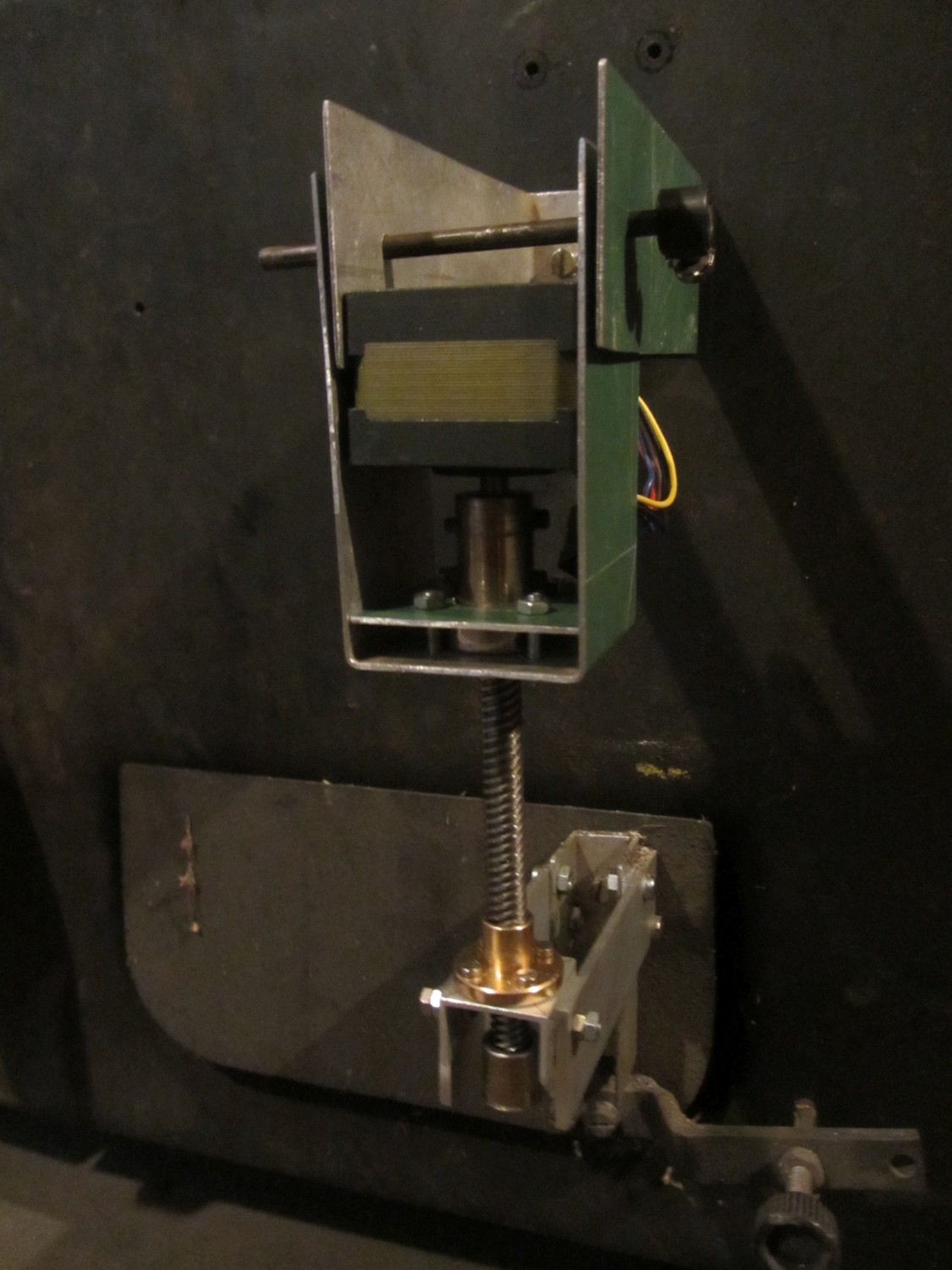

Paul schrieb: > Zahnriemen? Zahnräder? Seilzug? Hebel? Alles möglich, aber es fehlt noch die Spindel. Für die Luftklappe meines Feststoffkessels habe ich einen Nema17 aus einem alten Floppy-Laufwerk genommen. Die Klappe wiegt ca. 1kg. Mit geeigneter Ansteuerung schafft er meine Anforderungen gut. Etwas schwer erkennbar ist unten ein zusätzliches Lager eingebaut, da der Motor nicht für eine axiale Belastung gebaut ist. In einem primitiven Testaufbau (Bild2) habe ich Elektronik, Geschwindigkeit und Hubkraft gemessen. Das ganze wird über einen AVR gesteuert. Er fährt beim Einschalten mit geringem Strom gegen den unteren Anschlag und startet so mit der Nullposition ohne zusätzliche Wegmarkierungen. Die Sollposition bekommt er über I2C. Dies nur zur Ergänzung der Lösungsmöglichkeiten.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.