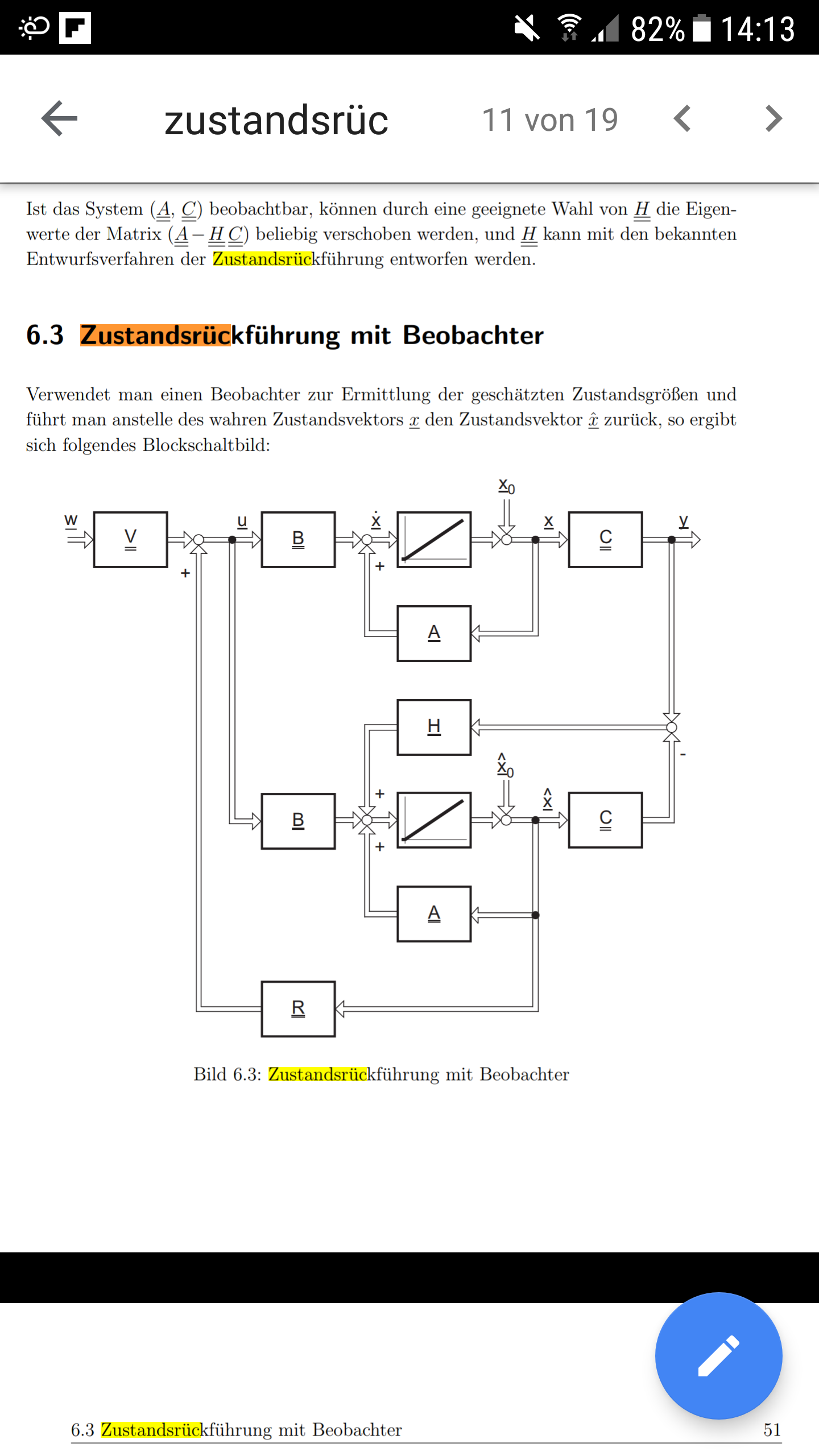
Weiss jemand welche Informationen ein Vorfilter V, die Zustandsrückführung R und die Rückführmatrix R tragen? Also was die Matrizen bewirken sollen im Lueneberger Beobachter Gesamtblockschaltbild. Es ist ja so das man den Standard Lueneberger Beobachter erweitern kann um die drei oben genannten Matrizen. Deshalb würde mich interessieren was die einzelnen Matrizen bewirken sollen. Ich finde leider nichts im Internet dazu, da nur die Standard Beobachter dargestellt werden. Ich glaube die Rückführmatrix soll den Zustandsregler darstellen. Also die Rückkopplung der Strecke (welche im Zustandsraummodell beschrieben wird), wird in der Rückkopplung geregelt. . Also etwas anders als die Standardregelkreise wo Regler - Regelstrecke gilt. Der Vorfilter wird denke ich eingesetzt um stationäre genauigkeit zu garantieren bzgl. der Strecke. Wieso aber ,,Filter" ? Und wieso wirkt dieser Vor dem Gesamtblockschaltbild? Kann dazu bitte jemand etwas sagen ?
Ich kannte noch nicht mal den Begriff (da ist auch ein e zuviel) https://de.wikipedia.org/wiki/Beobachter_(Regelungstechnik)#Luenberger-Beobachter Ich hatte zwar Vorlesungen bei dem unten genannten Otto Föllinger, aber das Wort ist mir nicht in Erinnerung. (Ich hätte darunter eher eine Konkurrenz zum Lüneburger Tagblatt vermutet oder wie das dort sonst heissen mag. Aber "Beobachter" ist tatsächlich ein Begriff aus der Regelungstechnik.) Hoffen wir mal, dass ein "Wissender" hier vorbeischaut und gehaltvolleres zu sagen hat.
ichzahlekeinschutzgeld schrieb: > Weiss jemand welche Informationen ein Vorfilter V, die > Zustandsrückführung R und die Rückführmatrix R tragen? Kannst du mal bitte ein Bild aufzeichen oder V und R benennen. Die Zustandsbeschreibung erfolgt im Allgemeinen mit den Matrizen A,B,C und D.
Angehängte Dateien:
Ich denke die Zustandsrückführung R wird danm fie eigentlichen geschätzen bzw rekonstruierten Zustandsgrößen x^ rückkoppeln. Was soll dann aber H sein? Ich habe im Internet gelesen das es soch um fen eigentlichen Zustandsregler handelt. Aber wieso wirkt er dann vor T? Zum Vorfilter V hab ich jetzt gelesen das er dafür sorgt das stationäre Führungsgenauigleit erzwungen wird. Wo ich das eigentliche Problem habe ist, wo denn beim Blockschaltbild der eigentliche regler sein soll. Also wo dann mithilfe der rekonstruierten Zustandsgrößen geregelt wird.
Angehängte Dateien:
-

20190307_141443.png
210 KB
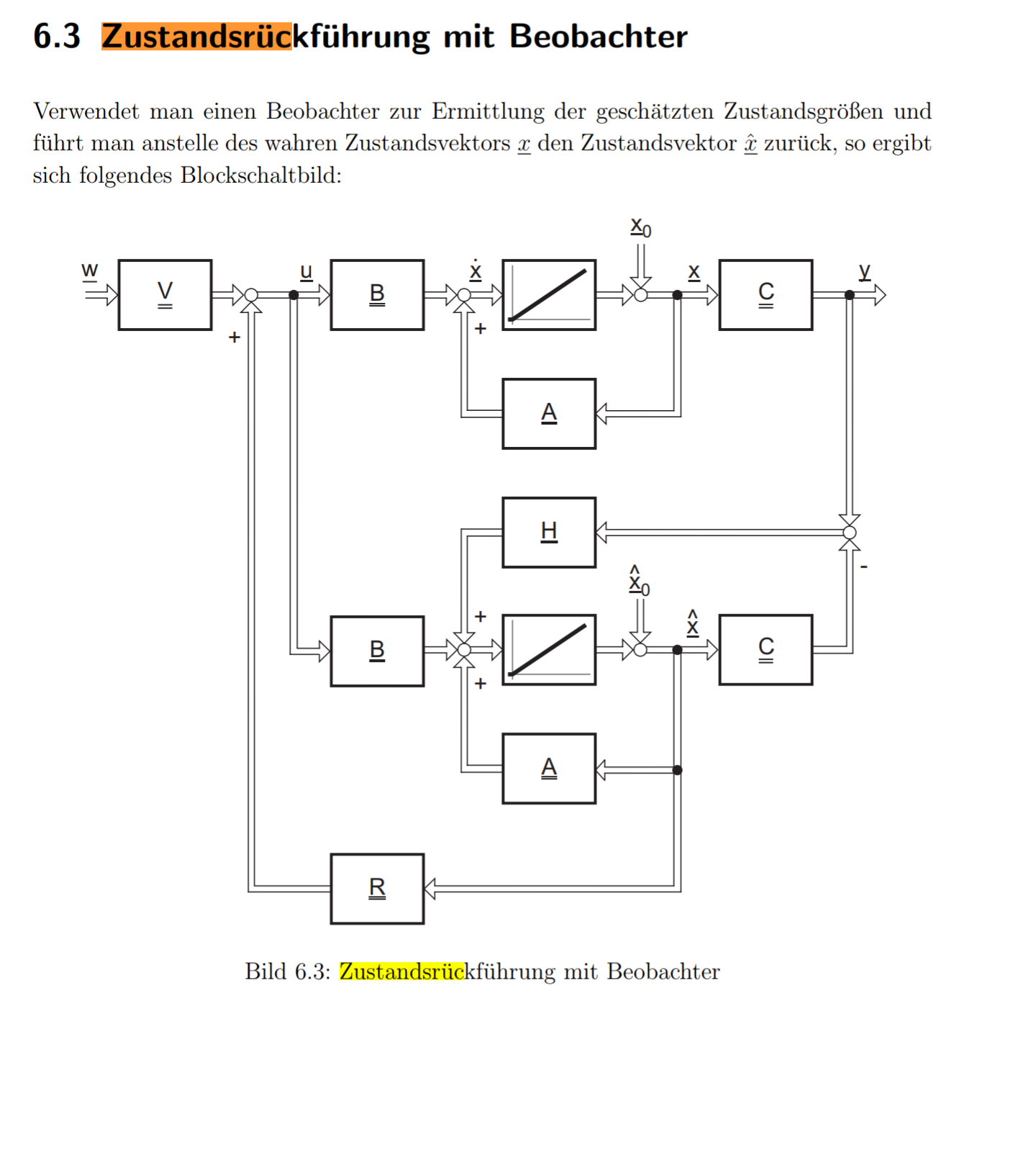
So nochmal vernünftig: Ich denke die Zustandsrückführung R wird dann die eigentlichen geschätzen bzw rekonstruierten Zustandsgrößen x^ rückkoppeln. Was soll dann aber H sein? Ich habe im Internet gelesen das es sich um den eigentlichen Zustandsregler handelt. Aber wieso wirkt er dann vor R? Also man muss ja erst die Zustandsgrößen rausbekommen und danach regeln. Und hier wird vorm rekonstruieren geregelt... Zum Vorfilter V hab ich jetzt gelesen das er sorgt das stationäre Führungsgenauigkeit erzwungen wird. Wo ich das eigentliche Problem habe ist, wo denn beim Blockschaltbild der eigentliche regler sein soll. Also wo dann mithilfe der rekonstruierten Zustandsgrößen geregelt wird.
Ok H soll die Rückführungsverstärkung sein und V die Vorverstärkung. H ist nur wirksam wenn die Zustandsgrößen x ungleich der rekonstruierten x^ ist (allgemeine folgen von störungen). Jetzt gilt d/dt(x-x^)=(A-HC)e mit e=x--x^ Es handelt sich um einen Beobachterfehler e, da das system evtl. Nicht steuerbar ist. Die Verstärkungsmatrix H ist dabei noch frei wählbar. Die Eigenwerte von (A-HC) sollten in der s Ebene links der Eigenwerte von A liegen. Damit wird der Beobachter schneller als die Regelstrecke.
Kann es sein das der komplette Beobachter der eigentliche Zustandsregler ist?
Die Vorsteuerung hat erstmal nichts mit dem Beobachter zu tun und wird auch unabhängig davon ausgelegt (dient der stationären Genauigkeit oder als dynamische Vorsteuerung) H ist die Beobachterverstärkung und sorgt dafür, dass die beobachteten Zustände da liegen, wo sie hingehören. Die Zustandsrückführung ist auch unabhängig vom Beobachter und kann auch mit gemessenen Zustandsgrößen beaufschlagt werden.
donvido hat da recht. Wir können das Blockschaltbild aufteilen: - Die Strecke aus A,B,C und Integrator -Den Beobachter: -> A,B,C sind das Model, da die berechnete Ausgangsgröße der Strecke von der der realen Strecke abweicht, nutzen wir -> H um unser Model der Strecke, den Beobachter, an die tatsächliche Strecke anzupassen, sodass wir anhand des Modell alle Zustandgrößen berechnen können. Von der realen Zustandsgrößen haben wir ja nur die Ausgangsgröße oder ein Teil der Zustandsgrößen. - Die Zustandsregelung -> R führt die Zustandsgrößen zurück, hier passiert die Zustandsregelung -> V Vorfilter für statische Abweichung und Dynamik Basierend auf dem Bild von Gogaha.
H bestimmt die Dynamik des Beobachters, muss schneller als das System sein. Dafür wird lieber L wie Luenberger genommen. R bestimmt die Pole des Systems, das ist der Zustandsregler. V ist die Vorsteuerung. Ohne die laufen beispielsweise für ein stabiles System alle Zustandsgrössen zu 0. Will man irgendwo anders hin kann man das an dieser Stelle erzwingen. Cheers Detlef
Hey Detlef, mich würde interessieren was du meinst ,,schneller als das System" sein.
NachtEule schrieb: > Hey Detlef, mich würde interessieren was du meinst ,,schneller als > das > System" sein. Die Polstellen den Beobachters müssen in der s-Halbebene links von denen des Systems liegen, sonst ist der Beobachter nicht dazu in der lage, die Zustände ausreichend schnell zu bestimmen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.