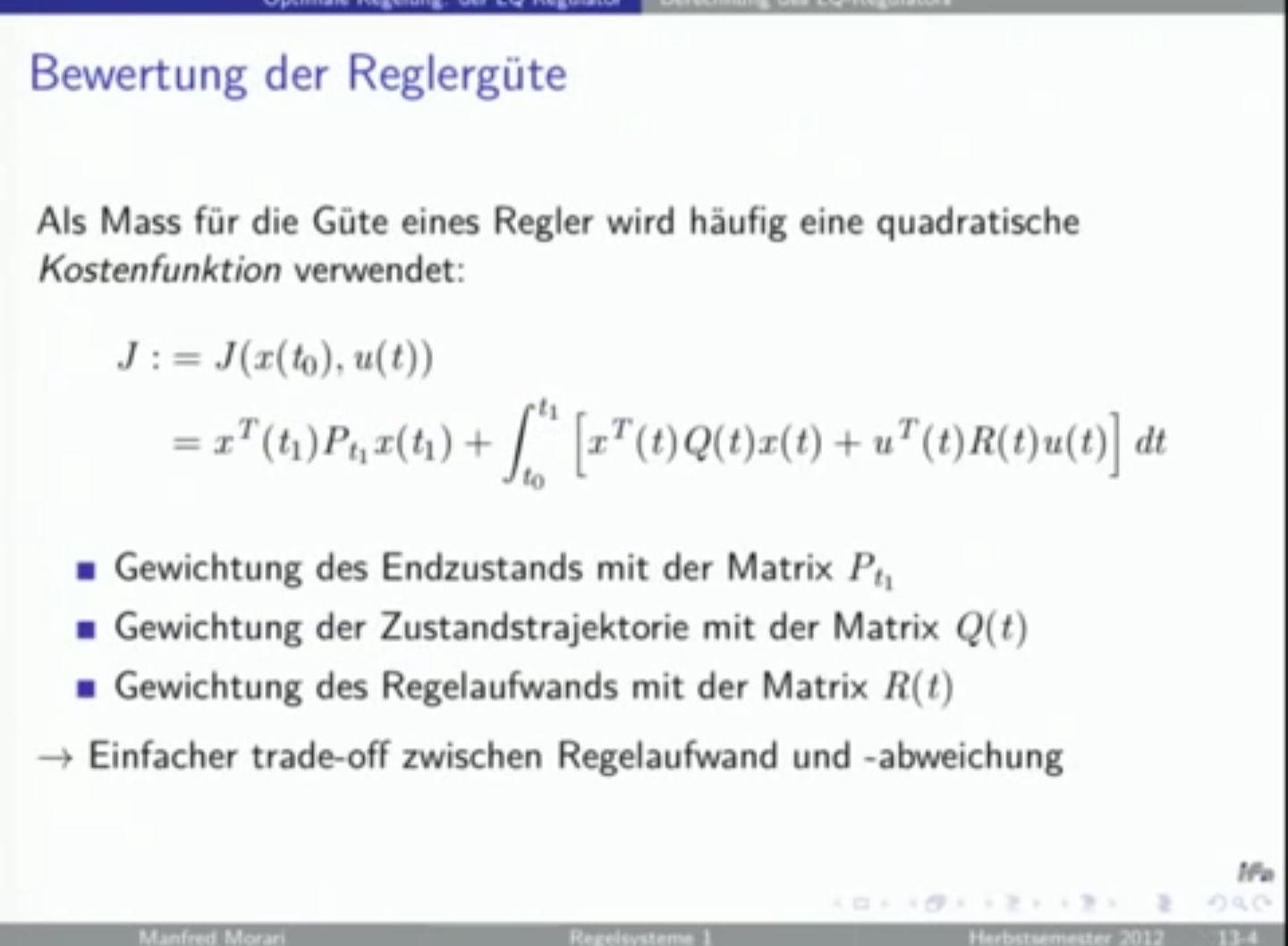
Mithilfe der Eigenwertvorgabe lassen sich ja die Pole des Geschlossenen Regelkreises beliebig Platzieren. So kann man Einfluss auf die Dynamik des Systems nehmen (Robustheit, Stabilität, störgrößenunterdrückung, sprungantwort). Jetzt kann man ja eine Optimale Regelung mithilfe der LQ Regulators finden. Dieser beschreibt ja eine Kostenfunktion die allgemein von drei Termen abhängt. Jeder dieser Terme ist abhängig von einer Matrix. Nämlich P, Q und R. Jetzt würde mich folgendes interessieren. Das R in dieser Kostenfunktion ist nicht dasselbe der Rückführmatrix R oder? Dann würde mich allgemein interessieren wie man die Werte der Matrizen wählt. Ich habe es so verstanden das lediglich die Hauptdiagonalen relevant sind da die Nebendiagonalen Elemente 0 sind. Die Matrix P scheint man als letztes über die sogenanne Ricatti Matrix Gleichung bestimmen. Am Ende ist es das Ziel das doe Gesamtfunktion minimal wird. Das ganze klingt doch etwas abstrakt deshalb würde mich interessieren ob jemand mich etwas aufklären kann. Lg
Angehängte Dateien:
-

20190309_114020.png
510 KB
Donald2 schrieb: > Das R in dieser Kostenfunktion ist nicht dasselbe der Rückführmatrix R > oder? nein. Donald2 schrieb: > Dann würde mich allgemein interessieren wie man die Werte der Matrizen > wählt. kommt auf die Problemstellung an und die Gleichungen. Du baust einen Regler, der versucht, den von dir bestimmten Güteterm zu minimieren. Wenn du möchtest, dass eine bestimmte Größe in u oder x klein bleibt, musst du das Gewicht dazu hochdrehen. Aber das sthet ja bereits im von dir hochgeladenen Text. Nebendiagonalelemente kann man einsetzen, um Kopplungen darzustellen. Wird wohl in der Praxis nicht gemacht. Jedenfalls sollten P, R, Q positiv definit sein.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.