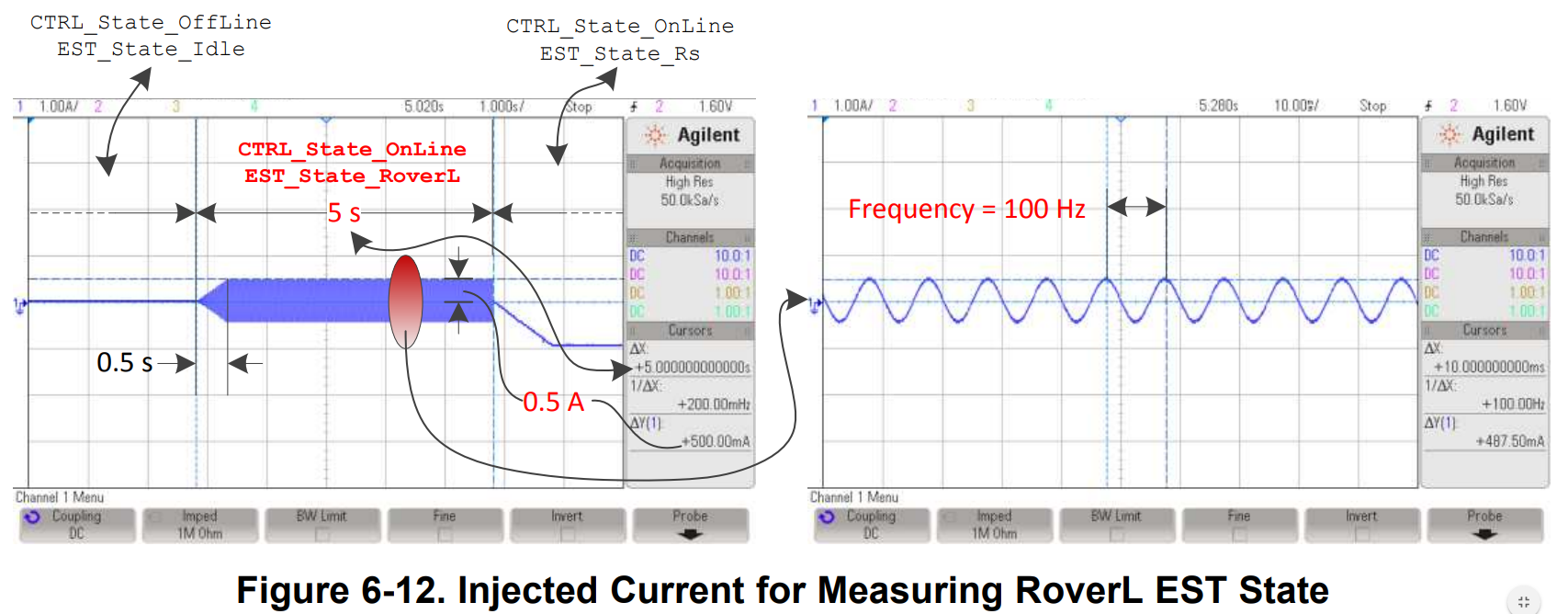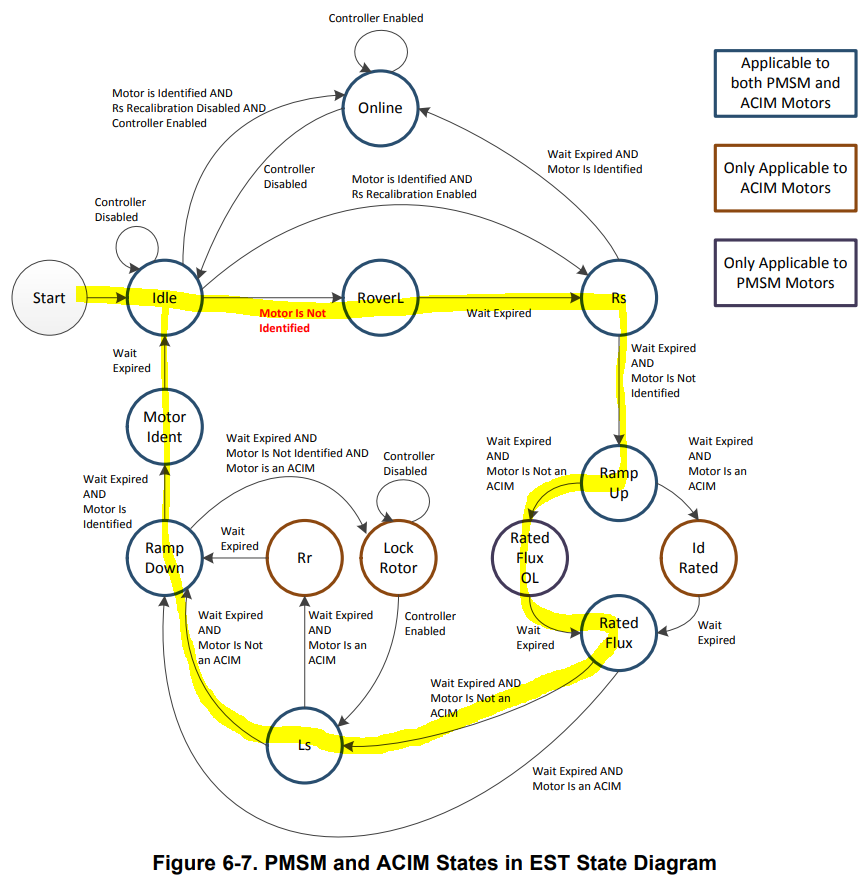
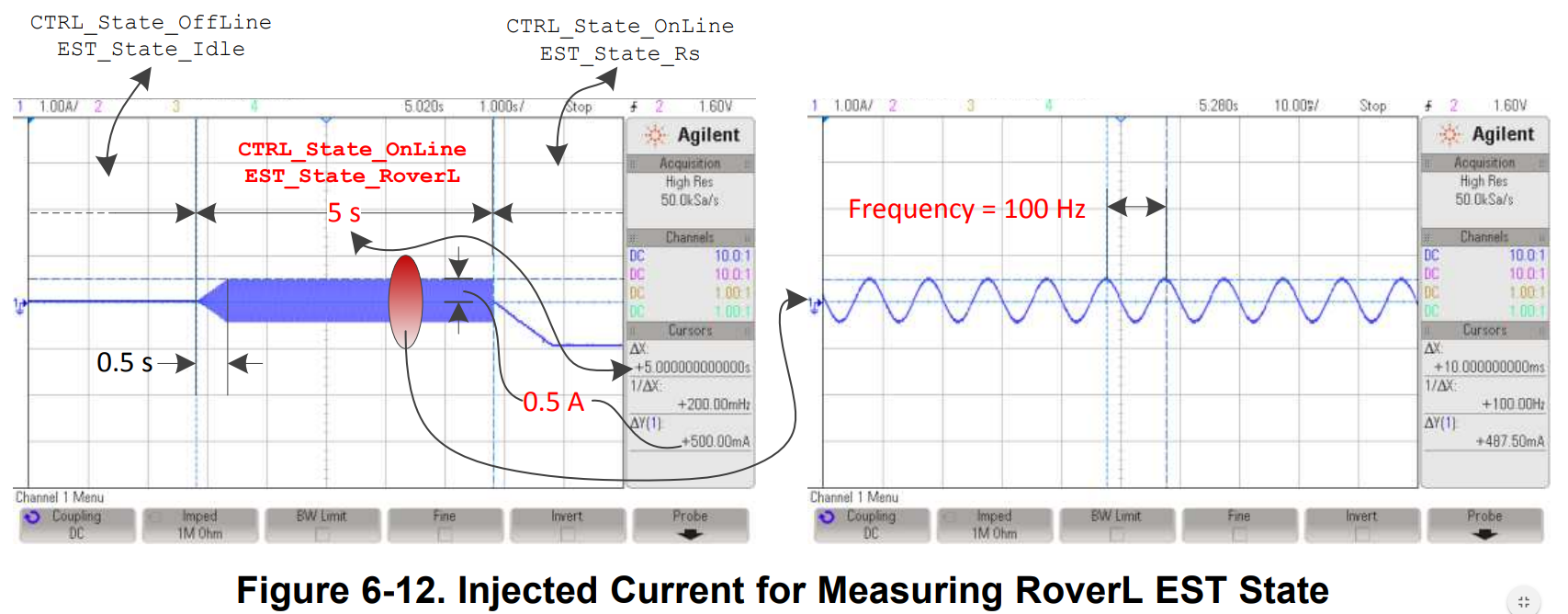
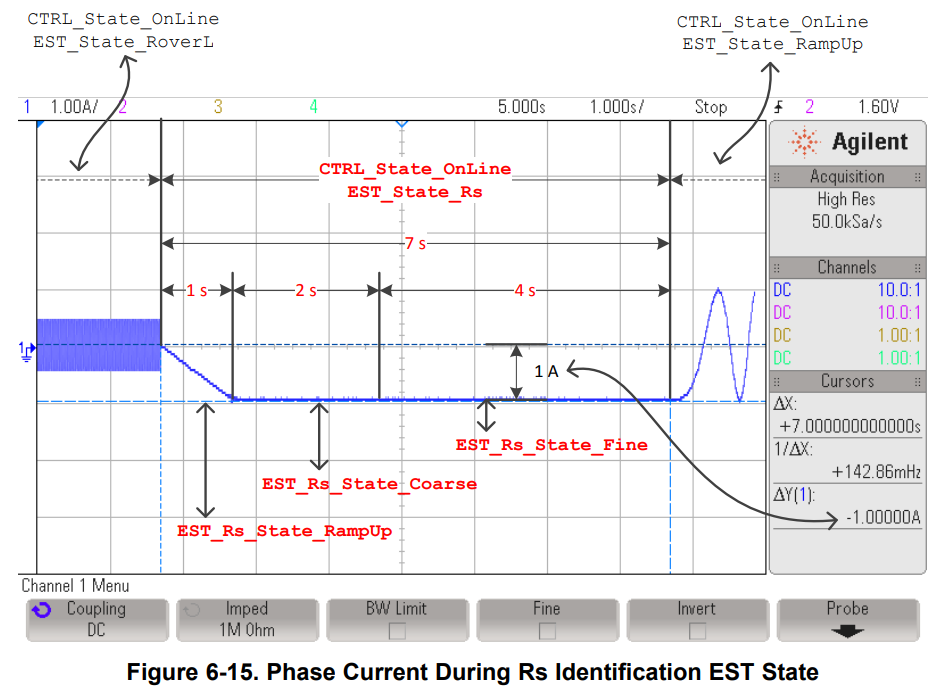
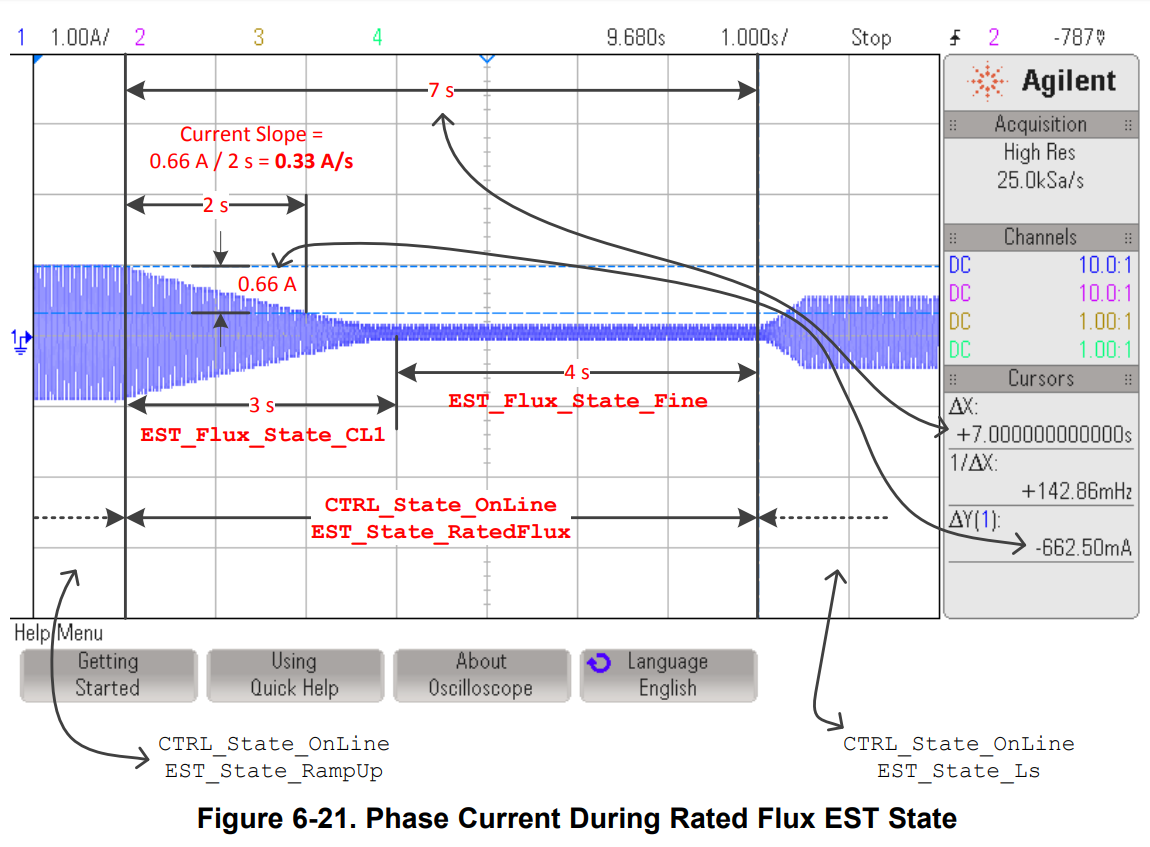
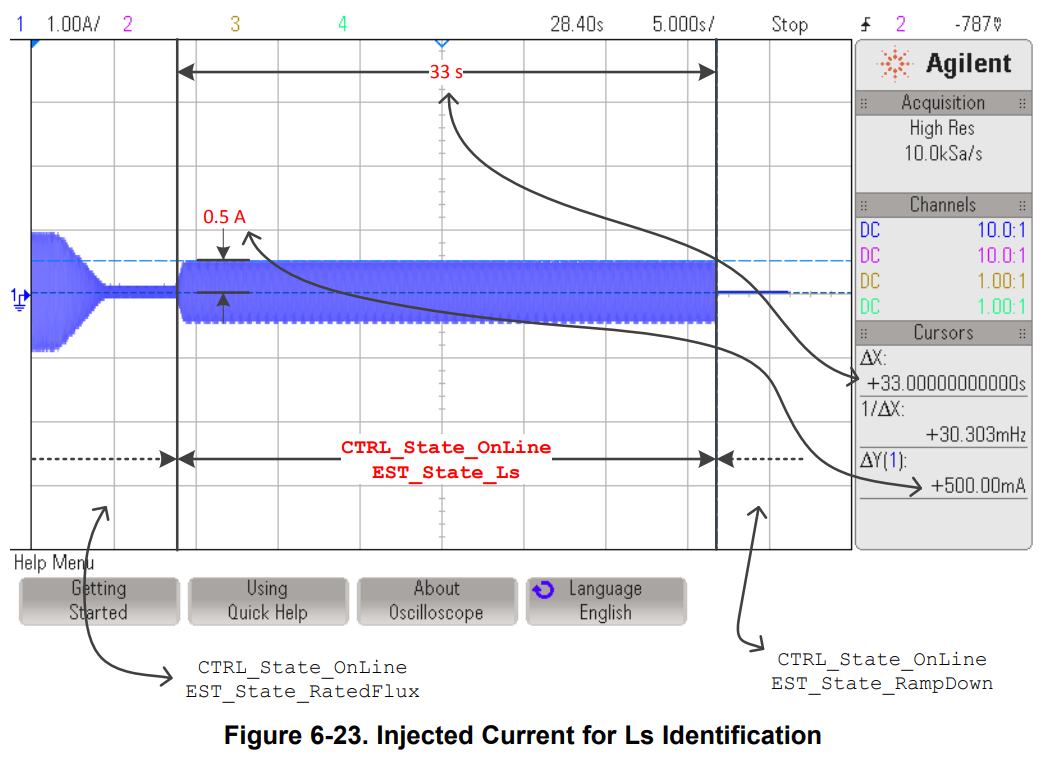
Hallo Zusammen, ich beschäftige mich gerade mit der Möglichkeit E-Motoren (PMSM) automatisch mittels eines µControllers und entsprechender Leistungselektronik zu vermessen. Bei einer Recherche ist mir das Texas Instruments Projekt FAST(Flux, Angle, Speed, Torque) ins Auge gesprungen. In der Dokumentation SPRUHJ1G werden Oszilloskop Aufnahmen der Parameteridentifikation gezeigt, allerdings wird natürlich nichts über den Algorithmus zur Bestimmung der Parameter gesagt. Ich würde gerne mal meine Ideen dazu vorstellen und ihr könnt mir gerne (Gegen-) Vorschläge unterbreiten. Bild "StateChart.PNG" zeigt das Ablauf-Diagramm mit eingezeichnetem Pfad für die Vermessung bei PMSM Maschinen. Auf den nachfolgenden Aufnahmen wird immer der Phasenstrom dargestellt. Die Markierungen "(?-X)" sollen meine Fragen darstellen. (1) RoverL.PNG zeigt die Messung der reziproken Zeitkonstenten R/L. Der Doku sind die folgenden Infos zu entnehmen: - Der Motor darf sich bei der Identifikation nicht drehen. Die Frequenz muss groß genug gewählt werden (Default 100 Hz) um dies zu gewährleisten. - Messung mittels konstantem Phasenstrom und Frequenz - Ti nennt diese Art der Messung „Hochfrequenzmessung“ und bestimmt Tau mittels einem Hochfrequenz Rs und Ls (Rhf & Lhf) (?-1) Habt ihr hier eine Idee wie man dabei an die Messgrößen Rhf & Lhf kommt? (2) Rs.PNG zeigt die Messung des seriellen Widerstandes Rs. - Der Motor steht bei der Messung weiterhin still - Einprägung eines DC-Stroms nur in direkter Magnetisierungsachse (hier 1A) Ich denke hierbei wird die benötigte Spannung als Berechnungsgrundlage für Rs verwendet. (3) RatedFlux.PNG zeigt die Messung der Flussverkettung durch die Permanentmagnete. - Zunächst wird der Motor im Open Loop auf die Drehzahl USER_MOTOR_FLUX_EST_FREQ_HZ beschleunigt - Umschaltung auf geschlossenen Stromregelkreis Initialauslegung des Reglers mit „R over L“ - Zitat: „[…] Die Stromaufnahme senkt sich auf einen minimalen Stromwert der benötigt wird, um die Drehfrequenz bei einer mechanischen Belastung konstant zu halten […]“ (?-2) Scheinbar wird der benötigte Phasenstrom zum Erhalt einer definierten Drehzahl ausgewertet. Mir fällt dabei allerdings kein Zusammenhang zur Flussverkettung oder BEMF ein. Ich habe die Konstante (Vs oder Wb) bisher immer nur im Generator-Betrieb gemessen. (4) Ls.PNG zeigt die Messung der seriellen Induktivität. - Der Motor wird weiterhin im Closed-Loop gedreht - Einregeln von d-Strom (Hier -0,5A) Hier denke ich, greift der Zusammenhang
wobei
Der Stromeffektivwert wäre bekannt da er eingeregelt wird. Rs wäre aus der zweiten Messung bekannt. Die Frequenz ist ebenfalls bekannt. Die Effektiv-Spannung ist die einzige Variable. Sie wird jedoch durch den Stromregler gestellt und lässt sich als dessen Reglerausgangsgröße ablesen. Vielleicht habt ihr ja Lust mir zu antworten, sonst ist das hier schon mal ein ganz netter Einstieg für interessierte Leute. :) Grüße Kai QUELLE: InstaSPIN-FOC™ and InstaSPIN-MOTION™ User's Guide; http://www.ti.com/lit/ug/spruhj1g/spruhj1g.pdf, Abgerufen am 16.03.2019