Hallo meine lieben, mich interessieren Paar fragen zu "Drohnenwesen" und ich wurde euch sehr dankbar wenn ihr das etwas enthüllen könnt! Ich steuere meine Drohne (Quadcopter) mit einem Fernbedienung der dem Empfänger ein PWM Signal liefert (und evtl. zurückkriegt - Telemetrie). Der flight Controller passt die Lage der Drohne (durch Sensoren, GPS, Korrektur der Luftströmungen (je nach Modell natürlich) und liefert an die (vier) Motor-Treiberstufen anderes PWM Signal (50Hz bzw. mit T=20ms, mit 1ms-2ms high-state = 0-100% Speed). 1. Wie sieht PWM Signal von Fernbedienung ans Flight Controller aus? Ist das nur ein Signal (Kanal) der für alle vier Motoren interpretiert wird oder sind es 4 separate Kanäle die dem Signal ans Treiberstufen weitergeleitet werden (mit zusätzlichen Anpassungen/Verbesserungen)? 2. Wie oft werden die Werte von FB (Fernbedienung) ans FC (Flight controller) übertragen? 3. Wie oft werden die PWM Werte von FC ans ESC geschickt? (ist schon klar das PWM Signal selbst 50 Hz ist, aber wie oft wird Duty Cycle aktualisiert, auch jede 20ms oder seltener?) 4. Die ESCs wandeln Gleichspannung von Lipos/Netzteil ins "Drehstrom" für die bürstenlose Motoren - dabei hört man das Fiepsen (ich meine Dabei nicht den Verbindungs/Initialisierungston) entweder von ESCs selbst oder von Motoren (gefüllt 2 bis 4 Khz Bereich) - was bestimmt dieses Fiepsen und gibt es ein Regel wie man rechnerisch auf diese Frequenzen kommt? 5. Wenn ich jetzt Tests ohne Lipos - mit Netztteil machen möchte und dabei 4 Motoren mit 50A bei 100% (laut Datasheet) steuern möchte - muss ich dann wirklich 200A am Ausgang des Netzteils ziehen müssen oder kommen die Werte nie zustande? Lieben Gruß, Nik
1. Wenns mehrere Kabel sind, dann pro Kanal ein Servosignal wie du beschrieben hast, wenn evtl. auch schneller, meist 100Hz. Nur ein Kabel heißt PPM, da werden x Pulse nacheinander geschickt, die Pause zwischen den Startflanken sind die Kanäle, am Ende kommt eine lange Pause als Sync. 2. So schnell wie's geht. Übliche Empfänger haben 100Hz Servopulse bzw. PPM. 3. Da wird meist 400Hz PWM benutzt, damit die Dinger sofort reagieren. Und ja, der Sinn ist jeden Puls zu aktualisieren. 4. Das ist die Frequenz der Motor-PWM, mit der die Leistung geregelt wird. Das Kommutieren ist weit langsamer. Liegt am ESC, es gibt piepsende und welche die das nicht machen. 5. Am schlimmsten sind schnelle Lageänderungen, also "Gas voll aufreißen -> Raketenstart". Und ja, wenn du 100% Last ziehst, müssen da in deinem Beispiel gut 200A kommen. In der Regel tust du das aber nicht. Da es aber zu durchaus auch katastrophalen Effekten kommen kann wenn die Spannung im Lastfall aussetzt solltest du da echt nur einen Akku nutzen. Netzteil parallel als Versuchsversorgung ist ok, aber schon 50cm Kabel sind quasi unmöglich.
1) Stichwort PPM - 1 bis 2 ms frames für jeden Kanal in der Reihenfolge. Kanal 1 z.b. 1,5ms, dann 0,5ms Pause, dann Kanal 2 z.b. 1ms + 1ms Pause etc. Wiederholung jede 20ms. 2) jede 20ms bei alten Fernbedienungen, neuere haben auch digitale Protokolle mit bis ca. 9ms Latenz 3) auch 20ms,kann aber variieren 4) die Frequenz wird von der Firm- und Hardware des Reglers bestimmt. Lässt sich mit alternativen Firmwares ändern. 5) Am besten sogar etwas mehr. MfG, Coldlogic
Jens M. schrieb: > 1. Wenns mehrere Kabel sind, dann pro Kanal ein Servosignal wie du > beschrieben hast, wenn evtl. auch schneller, meist 100Hz. > Nur ein Kabel heißt PPM, da werden x Pulse nacheinander geschickt, die > Pause zwischen den Startflanken sind die Kanäle, am Ende kommt eine > lange Pause als Sync. Ein Kabel? Mehrere Kabel? Du meinst wahrscheinlich die Strecke zwischen Empfänger und Flight Controller? Meine Frage ist was genau aus der Fernbedienung rauskommt PPM oder 4xPWM (was in einander transformierbar ist!?) > 2. So schnell wie's geht. Übliche Empfänger haben 100Hz Servopulse bzw. > PPM. Aber was bringt mir 100 Hz am Empfänger, wenn ich sowieso mein ESC PWM nur jede 20ms ändern kann? Oder gibt es auch die ESCs die schnellere PWMs erwarten? > 3. Da wird meist 400Hz PWM benutzt, damit die Dinger sofort reagieren. > Und ja, der Sinn ist jeden Puls zu aktualisieren. Siehe Frage von letztem Punkt. > 4. Das ist die Frequenz der Motor-PWM, mit der die Leistung geregelt > wird. Das Kommutieren ist weit langsamer. Liegt am ESC, es gibt > piepsende und welche die das nicht machen. Ok, kann man die Frequenzen irgendwie rechnerisch bestimmen? > 5. Am schlimmsten sind schnelle Lageänderungen, also "Gas voll aufreißen > -> Raketenstart". Und ja, wenn du 100% Last ziehst, müssen da in deinem > Beispiel gut 200A kommen. In der Regel tust du das aber nicht. > Da es aber zu durchaus auch katastrophalen Effekten kommen kann wenn die > Spannung im Lastfall aussetzt solltest du da echt nur einen Akku nutzen. > Netzteil parallel als Versuchsversorgung ist ok, aber schon 50cm Kabel > sind quasi unmöglich. Hmm, habe ein 100A Netzteil und ca. 2m 1,5mm^2 Leitungen, ist das zu gefährlich? Danke!
Viktor B. schrieb: > 1) Stichwort PPM - 1 bis 2 ms frames für jeden Kanal in der Reihenfolge. > Kanal 1 z.b. 1,5ms, dann 0,5ms Pause, dann Kanal 2 z.b. 1ms + 1ms Pause > etc. Wiederholung jede 20ms. Ach, OK, habe mir es auch so vorgestellt! > 2) jede 20ms bei alten Fernbedienungen, neuere haben auch digitale > Protokolle mit bis ca. 9ms Latenz Ich denke der Taranis X9D von FrSky soll noch diese "alte" Protokoll unterstützen > 3) auch 20ms,kann aber variieren Also, wenn ich richtig verstehe - Fernbedienung überträgt PWM Werte als PPM Sequenz z.B.: 1100,1200,1400,1300 (M1,M2,M3,M4) Empfänger leitet PPM weiter ans Flight controller - der passt die Werte an die Lage/Wind und sendet weiter ans ESCs? Die "Standard" tun das mit 20ms/20ms (FB-ESC), die neuere (von den Jens geschrieben hat) können mit 100Hz/400Hz (FB-ESC)? > 4) die Frequenz wird von der Firm- und Hardware des Reglers bestimmt. > Lässt sich mit alternativen Firmwares ändern. Also gibt es kein Standard Frequenz mit der die Teile Fiepsen!? > 5) Am besten sogar etwas mehr. 200A+ Netzteil, oh Gott)) > MfG, Coldlogic Vielen Dank!
Es ist übrigens inzwischen durchaus gebräuchlich statt PWM serielle digitale Signale zu nutzen. Und zwar sowohl vom Empfänger zum Flightcontroller (z.B. Graupner SUMD, oder Futaba S-BUS) als auch vom Flightcontroller zum Motorsteller (z.B. DSHOT, MULTISHOT, ONESHOT). PPM/PWM ist da nicht mehr so angesagt, da sich seriell die Signale genauer als auch schneller übertragen lassen. Aber es hängt wirklich sehr vom Hersteller als auch Produkt ab, welches Protokoll zum Einsatz kommt. PS: Wenn Du Dir sicher bist, dass es bei Dir PWM/PPM ist, ist diese Antwort natürlich obsolet.
Beitrag #5775623 wurde von einem Moderator gelöscht.
Markus M. schrieb: > Es ist übrigens inzwischen durchaus gebräuchlich statt PWM serielle > digitale Signale zu nutzen. > > Und zwar sowohl vom Empfänger zum Flightcontroller (z.B. Graupner SUMD, > oder Futaba S-BUS) als auch vom Flightcontroller zum Motorsteller (z.B. > DSHOT, MULTISHOT, ONESHOT). > > PPM/PWM ist da nicht mehr so angesagt, da sich seriell die Signale > genauer als auch schneller übertragen lassen. > > Aber es hängt wirklich sehr vom Hersteller als auch Produkt ab, welches > Protokoll zum Einsatz kommt. Danke, ich brauche nur die Hintergründe von "üblichen" FB/FC/ESCs zu verstehen, den ich sowieso die ESCs mit PWM Signalen aus STM32 Mikrocontroller ansteuere. Aber Eingangsdaten müssen dem richtigen FB/FC ähneln!
Gast
#5775641
Ein paar Sachen zum Nachlesen: SBUS, SUMD, PPM, PPM -Alles Protokolle von Fernbedienungen (Empfängern) (Jeti und Crossfire gibts auch noch) Hin zum Motor: PWM (wie oben beschrieben), Oneshot***, DShot***, Proshot, Teilweise auch CAN https://oscarliang.com/proshot-esc-protocol/ https://blog.seidel-philipp.de/dshot-digitale-reglersteuerung-mit-kiss/ Alternativ kann man sich auch die Doku von Betaflight/etc ansehen https://github.com/betaflight/betaflight/wiki Bei den ESCs gibt es auch haufenweise Updates (BLHELI) Und da wir grade dabei sind. Bei der aktuellen Beta von Betaflight gibt es ein nettes neues Feature: RPM Filter https://github.com/betaflight/betaflight/wiki/Bidirectional-DSHOT-and-RPM-Filter Zu den Strömen: Direkt mit einem passenden Lipo arbeiten. Wenn du genau wissen willst was bei deinem Kopter der Stand ist: Oszi anschließen und messen. Es gibt zig Typen und Kombinationen in hunderten Firmwareständen... G Ert
Naja, wenn Du die ESCs vom STM32 ansteuern willst, könnte ein serielles Signal doch einfacher sein, vorausgesetzt Dein Controller hat 4 UARTs. DSHOT ist inzwischen durchaus gebräuchlich, zumindest im Quardrocopter Sektor: https://blog.seidel-philipp.de/dshot-digital-esc-signal/ Selbst die kleinsten Graupner-Empfänger können z.B. SUMD ausgeben, d.h. man braucht nur ein Kabel von Empfänger zum FC und bekommt darüber bis zu 12 Kanäle digital als serielles Signal (mir Prüfsumme wimre) und muss sich nicht ums dekodieren / PPM kümmern. Ich will nicht sagen dass Du es so machen musst, es könnte sich aber lohnen darüber nachzudenken, wenn die Hardware es hergibt.
Nikita J. schrieb: > Ein Kabel? Mehrere Kabel? Du meinst wahrscheinlich die Strecke zwischen > Empfänger und Flight Controller? > > Meine Frage ist was genau aus der Fernbedienung rauskommt PPM oder 4xPWM > (was in einander transformierbar ist!?) Aus der Fernbedienung kommt ein ein digitales Telegramm, das via 2,4GHz PAcket-Funk übertragen wird. Aus dem Empfänger kommt, was auch immer der Empfänger kann. z.B. SBUS, (C)PPM oder eben PWM. Wenn du nur eine 3-polige Strippe vom FC zum Rx hast ist das SBUS oder PPM, sind es mehrere (meist eine 3-polige mit einem Signal, Plus & Masse und mehrere einpolige mit nur dem Signal) dann sind das einzelne PWMs mit Servosignalen. Nikita J. schrieb: > Aber was bringt mir 100 Hz am Empfänger, wenn ich sowieso mein ESC PWM > nur jede 20ms ändern kann? Oder gibt es auch die ESCs die schnellere > PWMs erwarten? Der Empfänger erzeugt jeden Impuls neu, sofern er neue Daten via Funk bekommen hat. Das ist bei 2,4Ghz asynchron, d.h. es kann sein, das der PWM-Puls der gleiche ist wie vorher, kann aber auch nicht. Da heutzutage Digitalservos benutzt werden, wird da meist 100Hz angesetzt, manche machen auch noch mehr für Highspeed-Anwendungen. Da wird dann u.U. auch das Funkprotokoll schneller. Und speziell im Drohnenbereich sind ESCs sehr viel schneller, damit Lageänderungen besser ausgeregelt werden. Nikita J. schrieb: > Ok, kann man die Frequenzen irgendwie rechnerisch bestimmen? Wozu? Das ist das Ende zwischen ESC und Motor, da ist völlig egal woher der ESC seine Info hat. Die PWM zur Leistungsregelung wird in der Hard- und Firmware des ESC festgelegt, manche haben eine Programmiermöglichkeit, da kann man dann zwischen Effizient aber laut und Leise aber heißer umstellen. Du kannst aber natürlich einfach mal ein Oszilloskop dranhängen und dir das Geschwurbel ansehen, da findest du dann die Frequenz. Nutzt dir aber nix. Wenns nervt kauf einen anderen ESC bzw. spiel eine neue Firmware auf. Nikita J. schrieb: > Hmm, habe ein 100A Netzteil und ca. 2m 1,5mm^2 Leitungen, ist das zu > gefährlich? Auf 30cm würde ich mit min. 4mm² rechnen. 2m ist quasi eine Explosion. Der Spannungsabfall und vor allem die Induktivität wird dir binnen Sekunden die ESCs killen wenn du das versuchst. Ein lokaler Akku der das kann und 2m 1,5mm² als Nachladeleitung, das wäre vielleicht möglich. Oder viele Elkos und dickere Leitung zum NT.
Beitrag #5785713 wurde von einem Moderator gelöscht.
Ert schrieb: > Ein paar Sachen zum Nachlesen: > SBUS, SUMD, PPM, PPM -Alles Protokolle von Fernbedienungen (Empfängern) > (Jeti und Crossfire gibts auch noch) > > Hin zum Motor: PWM (wie oben beschrieben), Oneshot***, DShot***, > Proshot, Teilweise auch CAN > https://oscarliang.com/proshot-esc-protocol/ > https://blog.seidel-philipp.de/dshot-digitale-reglersteuerung-mit-kiss/ > > Alternativ kann man sich auch die Doku von Betaflight/etc ansehen > https://github.com/betaflight/betaflight/wiki > > Bei den ESCs gibt es auch haufenweise Updates (BLHELI) > > Und da wir grade dabei sind. Bei der aktuellen Beta von Betaflight gibt > es ein nettes neues Feature: RPM Filter > https://github.com/betaflight/betaflight/wiki/Bidirectional-DSHOT-and-RPM-Filter Danke, ziehe ich mir rein! > Zu den Strömen: Direkt mit einem passenden Lipo arbeiten. Das wäre schwierig in dem Kontext das der Versuchsaufbau evtl. Stundenlang in einem Stillen Raum laufen soll. > Wenn du genau wissen willst was bei deinem Kopter der Stand ist: Oszi > anschließen und messen. Es gibt zig Typen und Kombinationen in hunderten > Firmwareständen... Mache ich, Danke! > G Ert
Markus M. schrieb: > Naja, wenn Du die ESCs vom STM32 ansteuern willst, könnte ein serielles > Signal doch einfacher sein, vorausgesetzt Dein Controller hat 4 UARTs. > > DSHOT ist inzwischen durchaus gebräuchlich, zumindest im Quardrocopter > Sektor: > > https://blog.seidel-philipp.de/dshot-digital-esc-signal/ > > Selbst die kleinsten Graupner-Empfänger können z.B. SUMD ausgeben, d.h. > man braucht nur ein Kabel von Empfänger zum FC und bekommt darüber bis > zu 12 Kanäle digital als serielles Signal (mir Prüfsumme wimre) und muss > sich nicht ums dekodieren / PPM kümmern. > > Ich will nicht sagen dass Du es so machen musst, es könnte sich aber > lohnen darüber nachzudenken, wenn die Hardware es hergibt. Ok, danke, ich denke mit nach/ bzw. überlege mir die Realisierung auch!
Jens M. schrieb: > Nikita J. schrieb: >> Ein Kabel? Mehrere Kabel? Du meinst wahrscheinlich die Strecke zwischen >> Empfänger und Flight Controller? >> >> Meine Frage ist was genau aus der Fernbedienung rauskommt PPM oder 4xPWM >> (was in einander transformierbar ist!?) > > Aus der Fernbedienung kommt ein ein digitales Telegramm, das via 2,4GHz > PAcket-Funk übertragen wird. > Aus dem Empfänger kommt, was auch immer der Empfänger kann. > z.B. SBUS, (C)PPM oder eben PWM. Wenn du nur eine 3-polige Strippe vom > FC zum Rx hast ist das SBUS oder PPM, sind es mehrere (meist eine > 3-polige mit einem Signal, Plus & Masse und mehrere einpolige mit nur > dem Signal) dann sind das einzelne PWMs mit Servosignalen. Alles klar, jetzt habe ich verstanden. Letztendlich ist es der Empfänger (je nach Übertragungsart) der mir passende Nutzsignale ausgibt (SBUS/PPM/PWM) > Nikita J. schrieb: >> Aber was bringt mir 100 Hz am Empfänger, wenn ich sowieso mein ESC PWM >> nur jede 20ms ändern kann? Oder gibt es auch die ESCs die schnellere >> PWMs erwarten? > > Der Empfänger erzeugt jeden Impuls neu, sofern er neue Daten via Funk > bekommen hat. > Das ist bei 2,4Ghz asynchron, d.h. es kann sein, das der PWM-Puls der > gleiche ist wie vorher, kann aber auch nicht. > Da heutzutage Digitalservos benutzt werden, wird da meist 100Hz > angesetzt, manche machen auch noch mehr für Highspeed-Anwendungen. Da > wird dann u.U. auch das Funkprotokoll schneller. > Und speziell im Drohnenbereich sind ESCs sehr viel schneller, damit > Lageänderungen besser ausgeregelt werden. Ach ok, verstehe! > Nikita J. schrieb: >> Ok, kann man die Frequenzen irgendwie rechnerisch bestimmen? > > Wozu? Es geht unter anderem um Akustischen Aufnahmen des Hörbaren Spektrums - und dieses Fipsen könnte eine wichtige Aussage für die Drohnendetektion sein! > Das ist das Ende zwischen ESC und Motor, da ist völlig egal woher der > ESC seine Info hat. Die PWM zur Leistungsregelung wird in der Hard- und > Firmware des ESC festgelegt, manche haben eine Programmiermöglichkeit, > da kann man dann zwischen Effizient aber laut und Leise aber heißer > umstellen. > Du kannst aber natürlich einfach mal ein Oszilloskop dranhängen und dir > das Geschwurbel ansehen, da findest du dann die Frequenz. Nutzt dir aber > nix. > Wenns nervt kauf einen anderen ESC bzw. spiel eine neue Firmware auf. > > Nikita J. schrieb: >> Hmm, habe ein 100A Netzteil und ca. 2m 1,5mm^2 Leitungen, ist das zu >> gefährlich? > > Auf 30cm würde ich mit min. 4mm² rechnen. > 2m ist quasi eine Explosion. Der Spannungsabfall und vor allem die > Induktivität wird dir binnen Sekunden die ESCs killen wenn du das > versuchst. > Ein lokaler Akku der das kann und 2m 1,5mm² als Nachladeleitung, das > wäre vielleicht möglich. Oder viele Elkos und dickere Leitung zum NT. Sorry ich habe natürlich Quatsch geschrieben - ich meine natürlich 15mm^2 für jeden max. 50A Strang und 1m lang die von einem 2m Strang (40mm^2 - Knotenpunkt) hängen. Zusätzlich kann ich ein 2es Netzteil mit gleicher Charakteristik Parallel aufstellen (auch mit 2m 40mm^2 zum Knotenpunkt)! Dann habe ich meine 200A. Die Elkos besser dann jeweils vor den ESCs 15mm^2 Leitungen oder zwischen dickeren 40mm^2 Zuleitungen? Damit es etwas verständlicher wird: Momentan: 100A NT-> 2m 40mm^2 Kupfer -> Verteilerkreis-> 4x 1m 15mm^2 Kupfer zu ESCs Zukunft: 2x100A NT -> 2x 2m 40mm^2 Kupfer (hier Elkos?) -> Verteilerkreis -> 4x 1m 15mm^2 Kupfer (oder hier Elkos?) zu ESCs Danke!
Nikita J. schrieb: >> Zu den Strömen: Direkt mit einem passenden Lipo arbeiten. > > Das wäre schwierig in dem Kontext das der Versuchsaufbau evtl. > Stundenlang in einem Stillen Raum laufen soll. Du kannst diese kleinen Motoren und ESCs nicht guten Gewissens stundenlang bei 100% laufen lassen (und "still" wirds in dem Raum dann garantiert auch nicht sein). Dem 50A-ESC werden in der Praxis die 50A nur für relativ kurze Momente abverlangt, währenddessen bekommt er ständig einen sehr kräftigen Luftstrom zur Kühlung. Ebenso die Motoren. Wenn Du es schaffst permanent Vollgas zu fliegen bis der Akku leer ist wird er das zwar wahrscheinlich überleben, aber nur weil nach 10 Sekunden vielleicht nur noch 30A fließen und Du nach spätestens ner Minute wieder landen mußt weil der Akku platt ist. Dafür das ganze irgendwo am Boden einzuspannen und womöglich noch ohne ausreichende Kühlung stundenlang am Limit laufen zu lassen ist das nicht gebaut. Das wird sich in Rauch auflösen.
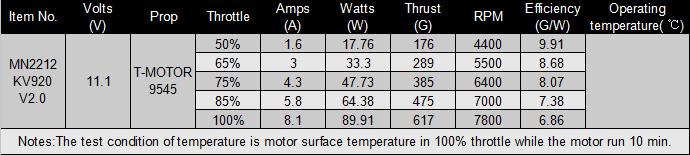
Bernd K. schrieb: > Nikita J. schrieb: >>> Zu den Strömen: Direkt mit einem passenden Lipo arbeiten. >> >> Das wäre schwierig in dem Kontext das der Versuchsaufbau evtl. >> Stundenlang in einem Stillen Raum laufen soll. > > Du kannst diese kleinen Motoren und ESCs nicht guten Gewissens > stundenlang bei 100% laufen lassen (und "still" wirds in dem Raum dann > garantiert auch nicht sein). Dem 50A-ESC werden in der Praxis die 50A > nur für relativ kurze Momente abverlangt, währenddessen bekommt er > ständig einen sehr kräftigen Luftstrom zur Kühlung. Ebenso die Motoren. > Wenn Du es schaffst permanent Vollgas zu fliegen bis der Akku leer ist > wird er das zwar wahrscheinlich überleben, aber nur weil nach 10 > Sekunden vielleicht nur noch 30A fließen und Du nach spätestens ner > Minute wieder landen mußt weil der Akku platt ist. > > Dafür das ganze irgendwo am Boden einzuspannen und womöglich noch ohne > ausreichende Kühlung stundenlang am Limit laufen zu lassen ist das nicht > gebaut. Das wird sich in Rauch auflösen. Hi Bernd, also Dauerhaft auf volllast wird es auf keinen Fall betrieben - es soll ja realistische Bewegungsabläufe (Kurven) kriegen was einer reellen Drohne zumutbar ist. Ich wollte mich natürlich absichern und von worst case ausgehen. Die Motoren werden auch häufig eine Ruhepause kriegen. Habe gerade mein Aufbau mit 4x T-Motor MN2212-18KV920, 4 x ESC S35A 600Hz 4 xPropeller HM-GAL1038 CFK 10x3.8 Carbon Propeller 5s laufen lassen, bei volldampf (ESC auf 2ms/20ms HIGH State) zog es aus meinem Netzteil um 30A.
Angehängte Dateien:
-

MN2212_TechData920.jpg
31 KB
Die Beschleunigungsphase des Propellers dürfte mehr nehmen als ein statisches Vollgasfahren.
Jens M. schrieb: > Die Beschleunigungsphase des Propellers dürfte mehr nehmen als ein > statisches Vollgasfahren. Wie kommst Du auf das schmale Brett? Die Props drehen sich schließlich nicht zum Spaß, die leisten harte Arbeit.
Nich? Fliegzeug braucht m.W. am meisten Power beim Beschleunigen, nicht beim Strecke machen. Wenn das falsch war, bitte ich natürlich um entschuldigung.
Jens M. schrieb: > Nich? > Fliegzeug braucht m.W. am meisten Power beim Beschleunigen, nicht beim > Strecke machen. > > Wenn das falsch war, bitte ich natürlich um entschuldigung. Ein manntragendes Flugzeug hat metergroße Propeller. Das Trägheitsmoment müsste so aus dem Bauch raus mit der fünften Potenz des Radius steigen wenn man alle Abmessungen proportional hochskaliert. Die Leistungsaufnahme bei konstanter Drehzahl steigt zwar ebenfalls mit der 5. Potenz des Radius aber die Drehzahlen bei Vollgas können bei den kleinen Propellern ganz erheblich viel höher sein ohne daß sie einem um die Ohren fliegen und die Leistungsaufnahme steigt mit der 3. Potenz der Drehzahl! Aus dem Bauch raus sollte also die Trägheit bei den kleinen Props erheblich weniger ins Gewicht fallen weil sie bei ganz erheblich höheren Drehzahlen betrieben werden können.
Ok Danke für neue Infos. Letzte Frage wäre - ich besitze ESCs S35A von T-Motor. "In Datasheet" unter "Batterycell" steht: 5-18NC/2-6Lipo Unter Motoren Sheet steht: Volts 11.1V So, verstehe ich richtig das 2s,3s,4s,5s,6s dem Anzahl der (Lipo)Zellen entspricht und z.B. 3S - 11.1V entspricht bzw. 4s 14.4V? Die Spannungen bleiben doch nicht konstant und senken mit der Entladung? Wenn auf meinem Motor 11,1V steht geht es um maximal Spannung? Was passiert wenn ich die ESCs mit 12V-13V einer Autobaterie anspeise? Regelt es ESC nach bzw. kann der Motor damit leben? Danke!
Gast
#5802317
Probier's doch einfach. Irgendwann musst du probieren. Ich denke es geht.
Also der Regler ist was die Spannung angeht erstmal unabhängig von den Motoren. 2-6 LiPo bezieht sich auf die Anzahl der LiPo Zellen. Eine vollgeladene LiPo Zelle hat 4,2V Leerlaufspannung. Diese fällt aber beim Entladen schnell auf ca. 3,7V, bleibt dann eine ganze Zeit relativ konstant und fällt dann am Ende der Kapazität stark ab. Bei ca. 3,5V/Zelle sollte man das Entladen stoppen um den Akku nicht zu beschädigen (der genaue Wert ist oft ein Streitthema). Google mal nach "Lipo Entladekurve". Normalerweise werden auch die Motoren für eine bestimmte Zellenanzahl gebaut, also z.B. für 2S-3S oder 3S-4S. Wenn sie mehr Spannung bekommen, wirst Du sie überlasten. Der ESC regelt die Spannung des Akkus für die Motoren NICHT herunter. Die Drehzahländerung erfolgt über das Tastverhätltnis der PWM beim Ansteuern der einzelnen Phasen des Motors. Der ESC schaltet also immer die einzelnen Motorspulen per MOSFET an oder aus. Nähere siehe auch hier: https://de.wikipedia.org/wiki/B%C3%BCrstenloser_Gleichstrommotor Daraus folgt, wenn Du dem ESC einen bestimmten Wert vorgibst als Eingangssignal (also bei der "normalen" PWM ansteuerung sagen wir mal 1,5ms was 50% entspricht), wird der Motor am Anfang schneller drehen, da der Akku noch voll geladen ist. Die Drehzahl wird danach sinken, da die Akkuspannung und somit auch die Spannung am Motor sinkt. Es gibt auch ESCs die die Drehzahl tatsächlich nachregeln. Diese werden hauptsächlich in Helicoptern (aber nicht Multicoptern) eingesetzt.
Nikita J. schrieb: > Unter Motoren Sheet steht: Volts 11.1V Die wichtige Zahl bei den Motoren ist die Drehzahlkonstante KV des Motors, das ist die erreichbare Drehzahl pro Volt und die Einheit ist U/(min*V). Ein Motor mit einem KV-Wert von 1000 könnte bei 11V also maximal 11000 U/min erreichen. Je höher die Spannung desto niedriger wählst Du den KV des Motors. Und je größer die Props desto niedriger und auch je größer der Anstellwinkel desto niedriger die Drehzahl und somit auch KV. Es gibt Erfahrungswerte die man ergoogeln kann bei welcher Propellergröße und welcher Spannung welcher KV-Wert vernünftig und angemessen wäre. Ich würde mal in den einschlägigen Foren rumfragen nach Leuten die Quads mit solchen mörder 10-Zoll-Props fliegen und was die verbaut haben damit es vernünftig fliegt und die Motoren nicht in Rauch aufgehen, ich schätze mal aus dem Bauch nicht höher als 1000KV bei 6s oder so in dem Dreh, eher niedriger.
Zu der Frage mit der Spannung nochmal: Die Motoren haben 920KV. Bei 3 LiPo (3S) Zellen ist die Spannung am Anfang 12,6V. Die Motoren werden also jetzt bei 13V von der Autobatterie nicht sofort in Rauch aufgehen oder so. Ob sie dauerhaft an der Autobatterie nicht überhitzen müsstest Du testen, das hängt auch von der Belastung (sprich den Propellern) ab. Letztendlich setzen sie ja elektrische Leistung (Spannung*Strom) in mechanische Leitsung (Bewegung) und Verlustleistung (Wärme) um. Je höher die Spannung, desto höher auch die Verlustleistung. Wenn die Motoren zu heiß werden leiden die Magnete und sie werden kaputtgehen.
Jitterer schrieb: > Probier's doch einfach. Irgendwann musst du probieren. Ich denke es > geht. Habe probiert - es Funktioniert!
Markus M. schrieb: > Also der Regler ist was die Spannung angeht erstmal unabhängig von den > Motoren. > > 2-6 LiPo bezieht sich auf die Anzahl der LiPo Zellen. Eine vollgeladene > LiPo Zelle hat 4,2V Leerlaufspannung. > > Diese fällt aber beim Entladen schnell auf ca. 3,7V, bleibt dann eine > ganze Zeit relativ konstant und fällt dann am Ende der Kapazität stark > ab. > > Bei ca. 3,5V/Zelle sollte man das Entladen stoppen um den Akku nicht zu > beschädigen (der genaue Wert ist oft ein Streitthema). > > Google mal nach "Lipo Entladekurve". Ok, so habe ich verstanden, Danke! > > Normalerweise werden auch die Motoren für eine bestimmte Zellenanzahl > gebaut, also z.B. für 2S-3S oder 3S-4S. Wenn sie mehr Spannung bekommen, > wirst Du sie überlasten. > In meinem Datenblatt steht:
1 | |
2 | |
3 | |
4 | |
5 | |
6 | |
7 | |
8 | |
9 | |
10 | |
11 | |
12 | |
13 | |
14 | |
15 | |
16 | |
17 | |
18 | |
19 | |
20 | |
21 | |
22 | |
23 | |
24 | |
Also kommen auch höhere Spannungen in Frage (wegen 4S) = 14,8V? > Der ESC regelt die Spannung des Akkus für die Motoren NICHT herunter. > Die Drehzahländerung erfolgt über das Tastverhätltnis der PWM beim > Ansteuern der einzelnen Phasen des Motors. Der ESC schaltet also immer > die einzelnen Motorspulen per MOSFET an oder aus. > > Nähere siehe auch hier: > https://de.wikipedia.org/wiki/B%C3%BCrstenloser_Gleichstrommotor Super, ich habe verstanden! > > Daraus folgt, wenn Du dem ESC einen bestimmten Wert vorgibst als > Eingangssignal (also bei der "normalen" PWM ansteuerung sagen wir mal > 1,5ms was 50% entspricht), wird der Motor am Anfang schneller drehen, da > der Akku noch voll geladen ist. Die Drehzahl wird danach sinken, da die > Akkuspannung und somit auch die Spannung am Motor sinkt. > > Es gibt auch ESCs die die Drehzahl tatsächlich nachregeln. Diese werden > hauptsächlich in Helicoptern (aber nicht Multicoptern) eingesetzt. Achso, ist wegen KV Zahl, richtig? Wenn mein Lipo z.B. 11,1V hat dann hat der Motor bei z.B. 50% 200 1/s und wenn Lipo auf 10,5 fällt dann bei gleichen 50% nur noch ca. 170 1/s?
Bernd K. schrieb: > Nikita J. schrieb: >> Unter Motoren Sheet steht: Volts 11.1V > > Die wichtige Zahl bei den Motoren ist die Drehzahlkonstante KV des > Motors, das ist die erreichbare Drehzahl pro Volt und die Einheit ist > U/(min*V). Ein Motor mit einem KV-Wert von 1000 könnte bei 11V also > maximal 11000 U/min erreichen. Je höher die Spannung desto niedriger > wählst Du den KV des Motors. Und je größer die Props desto niedriger und > auch je größer der Anstellwinkel desto niedriger die Drehzahl und somit > auch KV. > > Es gibt Erfahrungswerte die man ergoogeln kann bei welcher > Propellergröße und welcher Spannung welcher KV-Wert vernünftig und > angemessen wäre. Ich würde mal in den einschlägigen Foren rumfragen nach > Leuten die Quads mit solchen mörder 10-Zoll-Props fliegen und was die > verbaut haben damit es vernünftig fliegt und die Motoren nicht in Rauch > aufgehen, ich schätze mal aus dem Bauch nicht höher als 1000KV bei 6s > oder so in dem Dreh, eher niedriger. Zu jedem Motor hat T-Motor "Empfehlungen" - zu meinem MN2212 - T-Motor 9545 (9,5 Zoll). Ich muss noch andere Motoren/Propeller testen (auch FPF- -3-4 Zoll Props oder riesen Propeller (15 Zoll). Mit KV Zahl hast Du mir es klarer gemacht - Danke!
Markus M. schrieb: > Zu der Frage mit der Spannung nochmal: > > Die Motoren haben 920KV. Bei 3 LiPo (3S) Zellen ist die Spannung am > Anfang 12,6V. Die Motoren werden also jetzt bei 13V von der Autobatterie > nicht sofort in Rauch aufgehen oder so. > > Ob sie dauerhaft an der Autobatterie nicht überhitzen müsstest Du > testen, das hängt auch von der Belastung (sprich den Propellern) ab. Wie teste ich das? Wärmebldkamera, berühren? Was sind übliche Verfahren dafür? In Datenblatt zu Motor kann man finden: Typ: MN2212 920KV v.2 KV : 920 Konfiguration: 9N12P Stator Durchmesser: 22mm Stator Länge: 13mm Wellendurchmesser: 4mm Abmessungen: Φ 27,5 x 26,5mm Gewicht: 54g Leerlaufspannung (10)@10v(A) : 0.4A *Zellenzahl: 2S, 3S, 4S* Max. Strom (A) (180s) : 15A Max. Leistung (Watt) (180s) : 220W Optimaler Betriebsbereich: (2-7A) > 82% Innenwiderstand: 142 mΩ > > Letztendlich setzen sie ja elektrische Leistung (Spannung*Strom) in > mechanische Leitsung (Bewegung) und Verlustleistung (Wärme) um. Je höher > die Spannung, desto höher auch die Verlustleistung. > > Wenn die Motoren zu heiß werden leiden die Magnete und sie werden > kaputtgehen. Ok, ich bemühe mich die Motoren nicht auf Volllast zu fahren! Zusätzliche Frage - wie viel Strom kann ich maximal aus einer Autobatterie ziehen?
1 | |
2 | |
3 | |
Nikita J. schrieb: > Wie teste ich das? Wärmebldkamera, berühren? Was sind übliche Verfahren > dafür? Solange Du sie noch anfassen kannst ist es gut. Wenn Du Dir die Finger verbrennst ist es zuviel. Props müssen natürlich drauf sein wegen der Kühlung. Pass auf die Finger auf: Bei den großen Motoren und Props die Du Dir da vorgenommen hast gibts sonst ein Blutbad! Ich wäre nicht überrascht wenn es einen oder mehrere Finger komplett sauber abschneiden könnte! Ich würde die Gefahr nicht unterschätzen. Triff Vorkehrung gegen versehentliches Einschalten solange Du damit hantierst. Und zwar JEDES einzelne Mal!
Wenn dort steht bis 4S, können die Motoren bis 4 * 3,7 = 14,8V (Nennspannung, Anfangsspannung mit 4,2 V / Zeille wären 16,8V) betrieben werden. Allerdings muss man eben immer die Belastung der Motoren durch die Props im Auge behalten bzw. die Temperatur checken. Das mit dem Anfassen ist richtig, wenn man sich die Finger verbrennt sind die Motoren überlastet. Eine möglichst effiziente Kombination aus Motor / Spannung/Zellenzahl und Propeller zu finden ist eine Wissenschaft für sich. Der empfohlene Prop vom Motorhersteller ist schonmal ein guter Ausgangspunkt.
Antwort schreiben
Bitte melde dich an, um einen Beitrag zu schreiben.