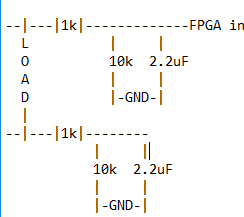
Hallo liebe Forengemeinde, ich habe eine Frage und konnte dazu leider kiene passende Antwort finden. Vielleicht könnt ihr mir ja helfen (und wenn es nur ein Link ist ;) ) Folgendes Problem: Ich habe einen Steppermotor-Treiberbaustein Typ TCA3723. Diesen möchte ich über seinen Stecker (Q11, Q12, Q21 und Q22 verfügbar) auf seine Funktion hin testen. Es soll eine Art Selbsttest werden, weshalb ich nur analoge Eingänge auf dem Board zur Verfügung habe. Ich dachte mir nun, dass ich Q11 über einen Lastwiderstand an Q12 verbinde. Das gleiche mache ich mit Q21 und Q22. Ich wollte vor dem jeweiligen Lastwiderstand seitens Qx1 das Signal mit einem anderen Widerstand ~1kOhm abgreifen und mit einer Kapazität gen Masse durch einen Tiefpass umwandeln, sodass sich das Signal gut analog einlesen lässt. Nur wie kann ich dann sicherstellen, dass Qx2 dann auch angeschlossen ist? Über Input würde ich mich sehr freuen. Vielen Dank, Peter
Angehängte Dateien:
-

f.png
1,4 KB
Hi, also die Eingänge sind nicht differenziell und an einem FPGA. Bis 3.3V sollte das kein Problem sein.
Ich dachte, dass ich, wenn ich so vorgehe, in beide Richtungen entweder eine positive oder negative Spannung am analog-Eingang sehen werde. Wäre eine der beiden Eingänge offen, sollte das Signal nicht richtig herum anliegen. So müsste ich eigentlich auch die Stromflussrichtung prüfen können. Oder denke ich ganz falsch?
In dem Falle benoetigst Du vier A/D-Eingaenge zum Messen. Alles andere leasst sich daraus simpel berechnen.
Heisst das Ding wirklich "TCA3723" ? Google findet damit nichts...
und hier gibts das Datenblatt dazu http://www.datasheetcatalog.com/datasheets_pdf/T/C/A/3/TCA3727.shtml
@adi Danke für deine Klarstellung! Das waren noch Zeiten, als es Chips von Siemens gab... Leider kann ich dem TO trotzdem nicht helfen, ich verstehe die Frage nicht.
adi schrieb: > und hier gibts das Datenblatt dazu > > http://www.datasheetcatalog.com/datasheets_pdf/T/C/A/3/TCA3727.shtml Dankeschön! Dieter schrieb: > In dem Falle benoetigst Du vier A/D-Eingaenge zum Messen. Alles andere > leasst sich daraus simpel berechnen. 4 Eingänge. Hui. Aber mit den Tiefpässen komme ich hin? Ich dachte, dass sich 2 jeweils in Abhängigkeit zueinander ergeben, weshalb mir 2 Eingänge reichen würden, um beide Phasen zu prüfen...
Peter schrieb: > Ich dachte mir nun, dass ich Q11 über einen Lastwiderstand an Q12 > verbinde. Der hat einen eingebauten Strom-Chopper und erwartet IMHO eine Induktivität als Last. Mit einem Lastwiderstand wird er wohl nicht richtig funktionieren. MfG Klaus
Klaus schrieb: > Peter schrieb: >> Ich dachte mir nun, dass ich Q11 über einen Lastwiderstand an Q12 >> verbinde. > > Der hat einen eingebauten Strom-Chopper und erwartet IMHO eine > Induktivität als Last. Mit einem Lastwiderstand wird er wohl nicht > richtig funktionieren. > > MfG Klaus Hallo Klaus, ich werde es ausprobieren, wenn die Schaltung steht. Gibt es vielleicht Feedback bezüglich der TP-Lösung? Hier bin ich sehr unsicher und möchte wirklich kein PCB fertigen lassen, das nachher gar nicht funktioniert ;)
Peter schrieb: > ich werde es ausprobieren, wenn die Schaltung steht. Einfach probieren. Motor vs Lastwiderstand und Scope. Lassen sich die Diagramme aus dem Datenblatt nachvollziehen? Wird der Strom geregelt? Wenn nein, brauchst du die Schaltung nicht zu bauen und mußt dir was anderes überlegen. MfG Klaus
adi schrieb: > und hier gibts das Datenblatt dazu > > http://www.datasheetcatalog.com/datasheets_pdf/T/C/A/3/TCA3727.shtml Warum nicht die aktuelle Rev 2.2 direkt vom Hersteller des TCA3727? https://www.infineon.com/dgdl/Infineon-TCA203727G-DS-v02_02-en.pdf?fileId=db3a30431f848401011fc7dbaad77a8c&ack=t
Peter schrieb: > ich werde es ausprobieren, wenn die Schaltung steht. Ohne induktive Last wirst du kaum die Funktion testen können, weil die Stromregelung dann nicht funktioniert. Nicht ohne Grund steht als erster Satz in der Beschreibung: "TCA3727G is a bipolar, monolithic IC for driving bipolar stepper motors, DC motors and other inductive loads thatoperate on constant current.". Ohne Induktivität funktioniert das Prinzip der Regelung nicht. Nicht ohne Grund taucht im Datenblatt als Last immer irgendeine Art von Spule auf.
Angehängte Dateien:
-

Unbenannt_-_Kopie.PNG
5,6 KB
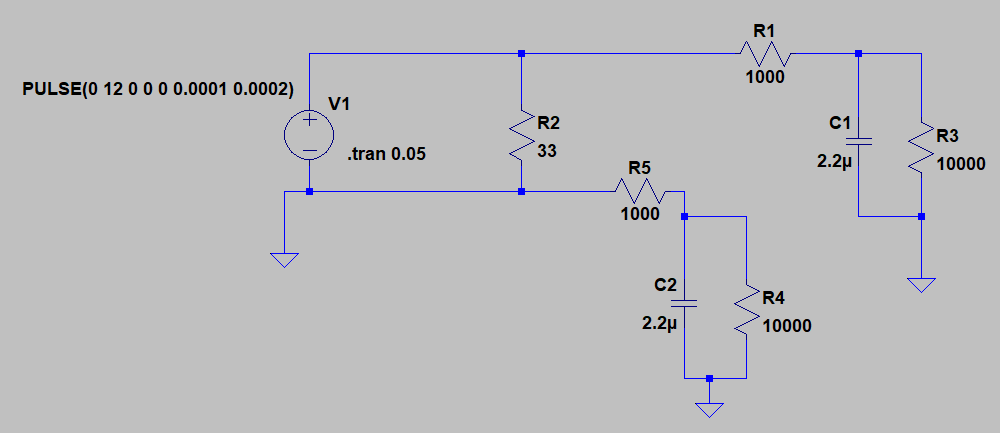
Klaus schrieb: > Peter schrieb: >> Ich dachte mir nun, dass ich Q11 über einen Lastwiderstand an Q12 >> verbinde. > > Der hat einen eingebauten Strom-Chopper und erwartet IMHO eine > Induktivität als Last. Mit einem Lastwiderstand wird er wohl nicht > richtig funktionieren. > > MfG Klaus Danke Klaus. Notfalls kann ich eine Induktivität einplanen 330uH oder so. Im schlimmsten Fall könnte ich auch einen Ringkern anschließen, das wäre dann annährend identisch zur eigentlichen Funktion. Ich dachte folgendes: Um zu testen ob der Treiber richtig geht und beide PINs einer Phase verfügbar sind, schließe ich ihn, wie abgebildet an. In die eine Bewegungsrichtung lädt sich der obere TP, in die andere der Untere, sodass ich an einem analogen Eingang eine relativ stabile Spannung lesen kann. Wenn ich beide Richtungen teste, kann ich sicher sein, dass die PINs und der Treiber richtig verlötet sind. Korrigiert mich bitte, falls das so nicht möglich ist. Dankeschön :) mfg Peter
Mir ist noch eingefallen, dass ich, wenn ich anstatt einem Widerstand als Last zwei nehme und diese nicht gleich sind, ich aus der anliegenden Spannung die Drehrichtung erkennen kann. Das sollte dann einen analogen Eingang einsparen.
Warum diese unverständlichen Klimmzüge? Was spricht denn eigentlich dagegen, einen Steppermotor anzuschließen (wie vorher bereits erwähnt). Da ist alles drin, was der Treiber sehen will und mit einer Markierung auf der Achse kann man sogar die Funktion erkennen. Und daran oszillographieren kann man sogar auch noch und bekommt sogar die real auftretende Kurvenverläufe...
Werner H. schrieb: > Warum diese unverständlichen Klimmzüge? > > Was spricht denn eigentlich dagegen, einen Steppermotor anzuschließen > (wie vorher bereits erwähnt). Da ist alles drin, was der Treiber sehen > will und mit einer Markierung auf der Achse kann man sogar die Funktion > erkennen. Und daran oszillographieren kann man sogar auch noch und > bekommt sogar die real auftretende Kurvenverläufe... Das bedeutet, dass ich bewegliche Teile einplanen müsste, was ich generell eher ungünstig finde. Ein Motor wäre auch teurer als die paar Widerstände und Kondensatoren. Weiterhin wäre in diesem Szenario eine Auswertung über Software nicht ohne Weiteres möglich, sondern ein Beobachter müsste die Achsenbewegung auswerten. Oder verhältnismäßig komplexe Signale müssten ausgewertet werden. Im Sinne von: Motor bewegt sich und ein Generator erzeugt dann wieder eine Spannung daraus o.ä. Generell möchte ich den Test als annähernd geschlossenens System aufbauen und in meienr Schaltung möglichst wenige tendenziell fehleranfällige Komponenten verwenden...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.