Hallo zusammen, ich benötige eure Hilfe für eine Konstruktion bei welcher ich zwar einen genauen Plan habe aber selbst keine Ahnung von der elektronischen Umsetzung. Also ich möchte einen Hebelarm ein Gewicht hochziehen lassen. Zusätzlich sollte der Hebelarm von einem Servomotor unterstützt werden, sobald man von extern mithilft das Gewicht hoch zu ziehen. Beispielsweise so wie bei einem E-Bike, dass die Bewegung unterstützt, sobald ich mit reintrete. Eckdaten: 1. Das Gewicht sollte in circa 1 Sekunde angehoben werden. 2. Der Hebelarm soll nur in eine Richtung (nach oben) vom Servomotor unterstützt werden. 3. Der Hebelarm beträgt circa 20-30cm Fragen: Ist es wichtig, ob ich AC oder DC im System benutze (für den Servomotor)? Wie stark muss der Motor sein und wie viel Strom muss ich anlegen, damit das Gewicht in der Zeit bewegt werden kann? Welche Komponenten benötige ich und wo kann ich diese am besten kaufen, damit ich das ganze zusammen basteln kann?
Was verstehst du an dem Forums-Untertitel "... Bitte hier keine Fragen posten!" nicht?
David E schrieb: > bei welcher ich zwar einen > genauen Plan habe aber selbst keine Ahnung von der elektronischen > Umsetzung. Dein Problem ist erst einmal die Mechanik. 50 kg Gewicht an 20-30 cm Hebelarm ergibt 100-150 Nm Drehmoment. Das geht mit "Bastelei" nicht wirklich. wendelsberg
Danke für die Antwort! :-) Was und wie kann man den ein solch großes Drehmoment erzeugen? Habt ihr eine Idee?
David E schrieb: > ich benötige eure Hilfe für eine Konstruktion bei welcher ich zwar einen > genauen Plan habe Dann poste doch mal den Plan. Ein Bild sagt mehr als 1000 Worte. David E schrieb: > Wie stark muss der Motor sein Du brauchst das Drehmoment: https://www.lernhelfer.de/schuelerlexikon/physik/artikel/drehmoment Und die Leistung: https://www.lernhelfer.de/schuelerlexikon/physik-abitur/artikel/mechanische-leistung Die elektrische Leistung deines "Servomotors" sollte wegen Verlusten und Sicherheitsfakor zumindest das doppelte der benötigten mechanischen Leistung sein. Also kannst du dir Strom und Spannung entsprechend ausrechnen: https://www.lernhelfer.de/schuelerlexikon/physik/artikel/elektrische-leistung Viel Spass beim Rechnen.
David E schrieb: > Was und wie kann man den ein solch großes Drehmoment erzeugen? Getriebe oder allgemein Untersetzung. Beispiele: Schneckenantrieb, Gewindespindel, Flaschenzüge, ... Ich dachte du hättest zumindest mechanisch: David E schrieb: > eine Konstruktion bei welcher ich zwar einen > genauen Plan habe ?
David E schrieb: > 1. Das Gewicht sollte in circa 1 Sekunde angehoben werden. Udo S. schrieb: > Beispiele: > Schneckenantrieb, Gewindespindel, Flaschenzüge, ... wendelsberg schrieb: > 50 kg Gewicht an 20-30 cm Hebelarm ergibt 100-150 Nm Drehmoment. Das sind schon mal Zahlen, mit denen man rechen könnte, Wenn man den prinzipiellen mechanischen Aufbau kennen würde. Daher lieber TO: Mach mal ne Skizze, wie das Gerät aussehen soll
Angehängte Dateien:
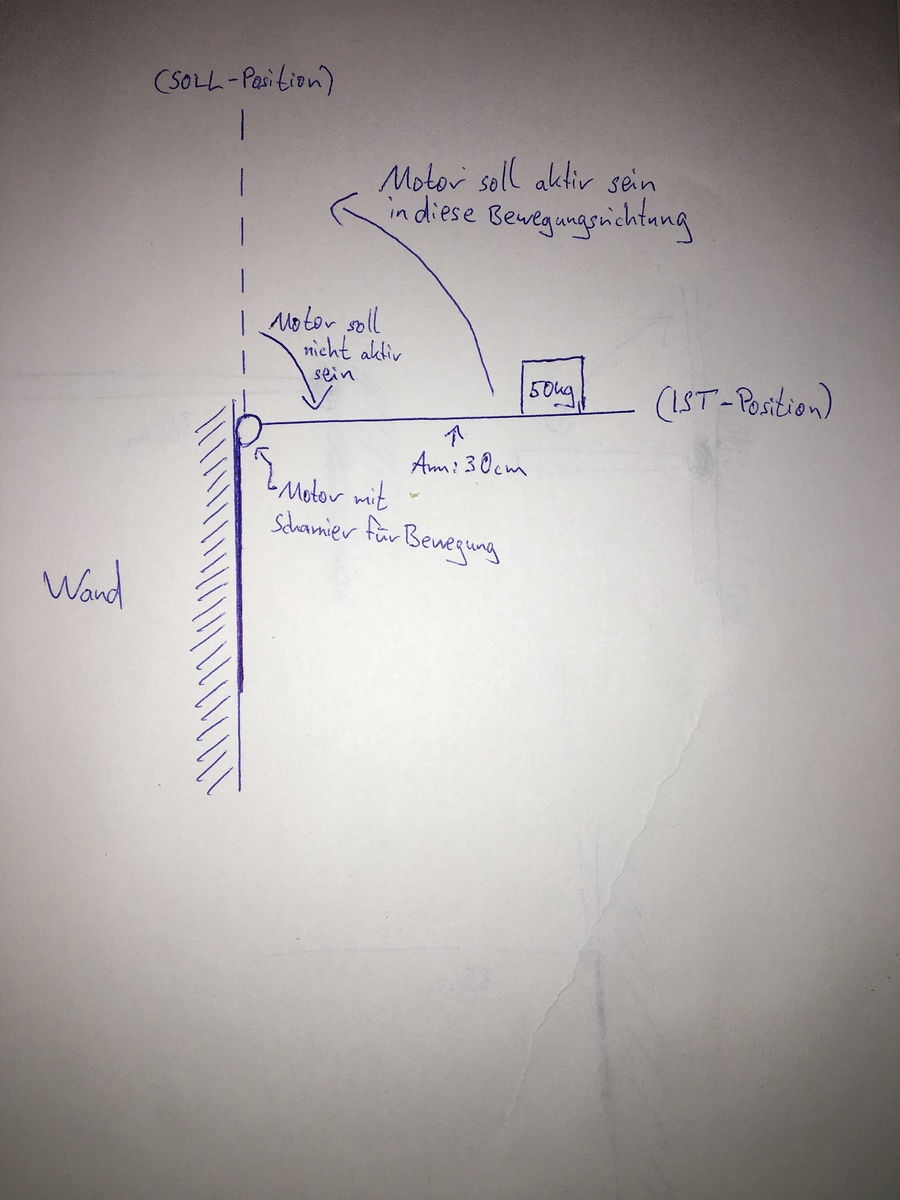
Hier habt ihr eine Skizze/Plan von meiner Idee. Ein Arm (30cm) soll mit Hilfe eines „Motors“ ein Gewicht von 50 kg in eine Bewegungsrichtung (nach oben) heben. In die andere Bewegungsrichtung (nach unten) soll der Motor nicht aktiv sein. Ich rede die ganze Zeit von einem „Servomotor“, und verzeiht mir wenn ich das alles so Laienhaft ausdrücke, weil ich gerne möchte, dass der Arm erst dann von dem Motor angetrieben wird, wenn ich den Arm mit einer externen Kraft (meine Hand beispielsweise) anhebe. Ich denke, da würde man noch einen Sensor oder ähnliches benötigen, der merkt, dass wenn Max Mustermann den Arm mit dem Gewicht anheben möchte, dass er den Motor als Unterstützung einschaltet. Wie kann man sowas umsetzen ? Wenn ich den Motor mit Elektrizität betreiben möchte, welche Komponenten benötige ich und welche Leistungen müssen Sie aufbringen um das Gewicht zu heben? Vielleicht könnt ihr mir ein paar genaue Hilfestellungen und Zahlen geben. Sehr kompliziert, ich weiß. Ich Danke euch allen sehr für die zahlreichen antworten und freue mich, wenn wir zusammen eine Lösung finden können. Ich selber bin leider nicht all zu tief mit der Mathematik hierbei vertraut und bin auf eure Hilfe angewiesen. Gruß!
Dieses manuelle Anheben zu erkennen ist alles andere, als trivial. Wenn du willst, dass der Motor über den kompletten Weg unterstützt, dann überlege dir mal, wie sich die aufzubringende Kraft ändert. Denn die ist aufgrund der Drehbewegung nicht konstant. In der Ausgangslage musst du maximale Kraft aufbringen. Kurz vor dem Endpunkt fast gar keine mehr. Man könnte theoretisch die Durchbiegung des Hebels erfassen. Ist diese nimmt diese ab, dann hebt offenbar jemand an und der Motor unterstützt. Aber diese Biegung aufgrund des Gewichts wird immer geringer, je näher man an die Endlage kommt. Genau so verhält es sich, wenn man das Drehmoment an der Achse irgendwie erfassen wollte. Ich denke, das ist kein triviales Thema. Und für jemanden, der eigentlich keine Ahnung hat, ein vermutlich fast unlösbares Problem. Einfacher wäre es, wenn es einen Schalter gäbe, den man betätigt, der den Motor einschaltet und der Motor drückt das Gewicht alleine nach oben. Oben angekommen, deaktiviert sich der Motor von selbst. Das nächste Problem: Beim Absenken soll der Motor aus bleiben. Bei dem nötigen Drehmoment ist ein Getriebe mit großer Untersetzung nötig. Beim Absenken musst du manuell gegen die Hemmung des Getriebes arbeiten. Da könnte es sein, dass du das dann gar nicht oder nur sehr schwer bewegen kannst. Alles in Allem würde ich sagen: Schlag dir die Idee aus dem Kopf. Aber kann natürlich auch sein, dass ich grad die zündende triviale Idee nicht sehe :-) Was soll das ganze denn werden? Vielleicht gibt es auch noch einen ganz anderen Ansatz.
David E schrieb: > weil ich gerne möchte, dass der > Arm erst dann von dem Motor angetrieben wird, wenn ich den Arm mit einer > externen Kraft (meine Hand beispielsweise) anhebe Wenn ich das richtig verstehe ist das so etwas wie eine "Servolenkung", ein Lenkkraftverstärker. David E schrieb: > In die andere > Bewegungsrichtung (nach unten) soll der Motor nicht aktiv sein. Das wird nicht gehen. Wenn 100Nm nötig sind, um den Arm in einer bestimmten Position zu halten, der "Mensch" aber nur 10 liefert, dann muß der Motor immer 90Nm zusteuern, selbst wenn der Arm steht. Mann könnte in den Arm einen Biegebalken einbauen. Wenn der mehr als die von mir oben als Beispiel genannten 10Nm misst, wird der Motor so gesteuert, daß nur noch 10Nm am Hebel bleiben. Das kann jeder Getriebemotor. Und da ein Mensch nicht furchtbar schnell ist, kann die Untersetzung groß und der Motor (und sein Strom) klein sein. Also die maximal Geschwindigkeit des Hebels bestimmen, sie in eine Drehzahl umrechnen und zusammen mit den 150Nm von oben einen passende Getriebemotor suchen. Es darf aber kein selbstsperrendes Getriebe sein, sonst kommt die Kraft des "Menschen" gegen die Sperrung des Getriebes nicht an. MfG Klaus
Schlumpf schrieb: > Dieses manuelle Anheben zu erkennen ist alles andere, als trivial. Da hätte ich noch eine Idee: Eine versenkte Leiste unter der Platte mit Mikroschaltern. Der Rest gäbe wegen dem Riesen-Drehmoment ziemlicher Overkill. @TO: Mein Vorschlag: ein Gegengewicht das das Gewicht auf 2-5 kg reduziert. Braucht halt entsprechende Mechanik und Platz "in" der Wand. Dafür aber keinen Strom.
David E schrieb: > Wenn ich den Motor mit Elektrizität betreiben möchte, welche Komponenten > benötige ich und welche Leistungen müssen Sie aufbringen um das Gewicht > zu heben? Vielleicht könnt ihr mir ein paar genaue Hilfestellungen und > Zahlen geben. Ich hatte dir oben mehrere Links gepostet wie man das ausrechnet. Es waren extra KEINE Links zu Wikipedia oder andere hochmathematische Seiten, sondern zu Hilfeseiten für SCHÜLER! Warum hast du da nicht wenigstens mal versucht die Mechanik und die (vereinfachte) Mathematik zu verstehen? Ich unterstelle dir daß du nicht zu dumm bist, also warum versuchst du nicht mal das selbst zu rechnen. ES IST DEIN PROJEKT! Oder böse ausgedrückt: Keine Arme, keine Kekse.
Beitrag #5788270 wurde von einem Moderator gelöscht.
ich fass mal zusammen: - Winkelgeschwindigkeit von 4s^-1 - Drehmoment: min 150 Nm solche Beschleunigungen, Massen und Momentesind nicht Ohne. "Basteln" sollte man da nicht mehr. Solche Kräfte scheren Finger ab. Bei Hebe-Senke Mechanismen oder reversible Torsionsmomente kann man prima mechanische Energiespeicher einsetzen und viel Antriebskraft sparen - sprich: Federn. http://www.sodemann-federn.de/online-shop/drehfedern/pianodraht Federn haben konstantes Drehmoment. Das erforderliche Drehmoment über die Bewegung ist aber nicht konstant, sondern eine Trigonomifunktion - es braucht also noch einen Torsionsdämpfer. Mal dir mal die Kinematik auf. Die Erkennung von Hilfsantrieben (wohl gerne auch stetig und nicht nur 2-Punkt) ist ne richtig lustige Sache. Für 2-Punkt Überwachung kann man das mit einem Mikroschalter / Riegel machen. Wenn das Drehmoment des Antriebs stetig je nach manuel aufgebrachten manuellem Moment geregelt werden soll wird es komplizierter. Dann brauchst du eine Kraft/Momentmessung. Da aber die meiste Antriebseenergie eh aus der Feder kommen sollte, ist der Regelbereich gering.
Ich kann Sebastian nur zustimmen. Das ist einfach ne Nummer zu groß, wenn man wenig bis keine Ahnung hat. Ich hab auf die Schnelle mal gesucht, in welcher Liga da die Motoren sein müssen: https://www.elektromotorenmarkt.de/elektromotoren/ShopDetailPage.shtml?catsku=228&produktsku=6939&SelectedPage=2 Die 14rpm werden sicher nicht benötigt, das kann noch etwas langsamer und daher kleiner ausfallen. Aber man sieht zumindest mal, in welchen Größenordungen sich dann so ein Motor bewegt.
Statt sinnlos versuchen zu basteln, sollte der TO lieber was Fertiges zu kaufen und an seinen Bedarf anpassen. Hier mal ein paar Seilwinden als Anreiz. https://www.google.de/search?hl=de&tbm=isch&source=hp&biw=1152&bih=734&ei=YGqfXJ7fDcrUsAf1po7ICA&q=seilwinde+230v&oq=seilwinde+230v&gs_l=img.3..0l4j0i5i30l5j0i8i30.9512.18325..18919...0.0..0.167.1278.12j2......0....1..gws-wiz-img.pC0i_A4FwlE Mit dieser Salami-Taktik geht das sonst in die Hose. Wenn der TO nur versucht Physik für seinen Unterricht zu verstehen, sollte er lieber seinen Lehrer fragen. ;)
> Die 14rpm werden sicher nicht benötigt, das kann noch etwas langsamer > und daher kleiner ausfallen. 1s für 90°, das macht 15rpm ...
Wozu ein Motor? Das Problem könnte man auch pneumatisch lösen.
>Das Problem könnte man auch pneumatisch lösen.
Also Kompressor, Regelung, Tank, Verbindungen, Ventile usw.
Na ja! Viel geringer, als mit einem Motor, ist der Aufwandt auch nicht.
Mit 'ner Stange Dynamit bekommt man aber das meiste hoch!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.