Gast
#5810870
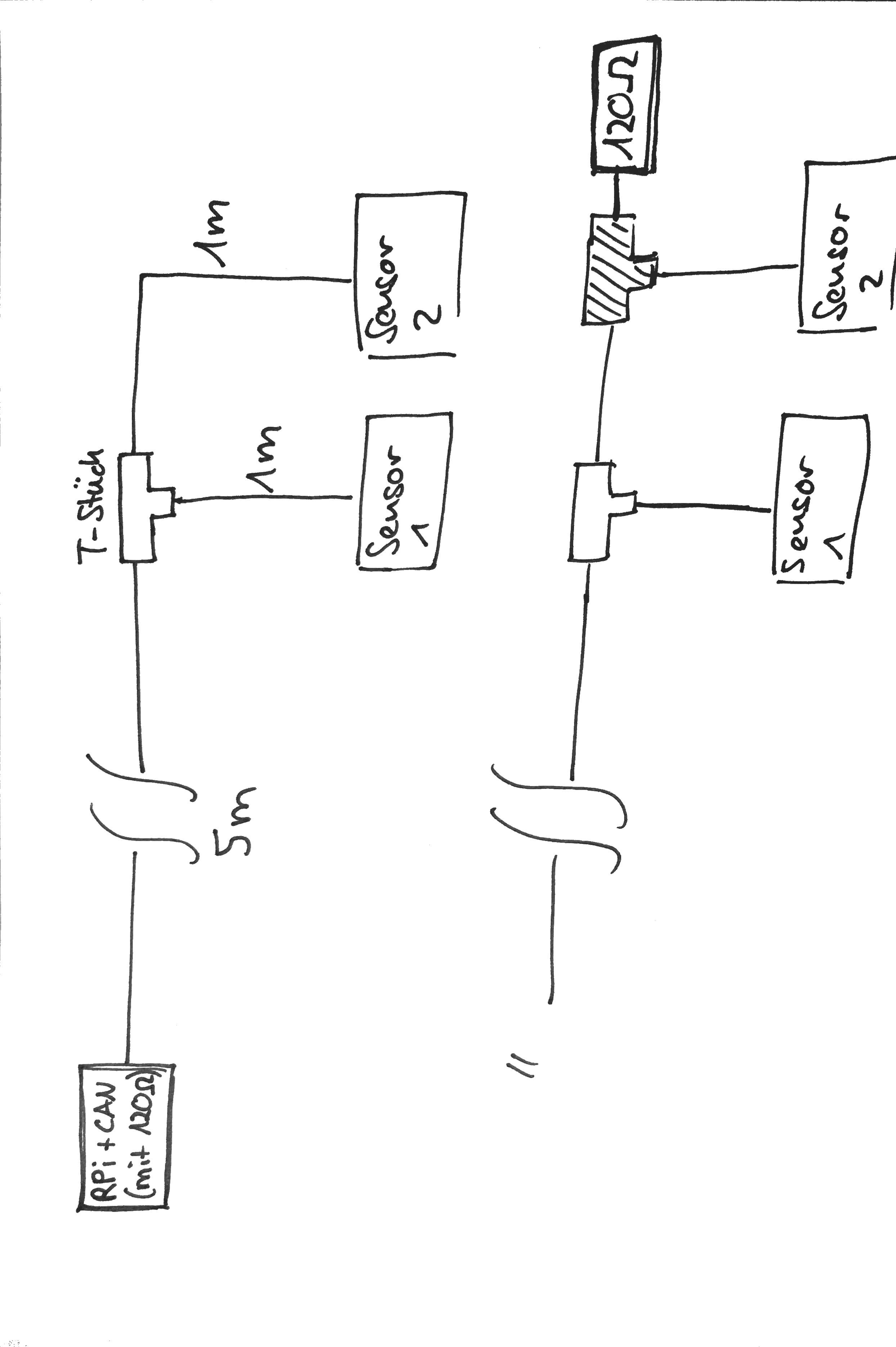
Hallo, bzgl. dem Abschlusswiderstand beim CANbus bin ich mir nicht ganz sicher. Der Master-Controller (RPi + PiCAN2-Shield) hat 120 Ohm. Am Bus sind min. 2 Sensoren (Slaves), welche keinen integrierten Abschlusswiderstand besitzen. Benötige ich hier einen weiteren Abschlusswiderstand (120 Ohm) am "Ende" der CANbus Leitung? Also am weitesten entfernen Sensor bzgl. dem Master. Als Kabel benutze ich: https://www.phoenixcontact.com/online/portal/us/?uri=pxc-oc-itemdetail:pid=1507560&library=usen&pcck=P-10-01-01&tab=1&selectedCategory=ALL Danke.