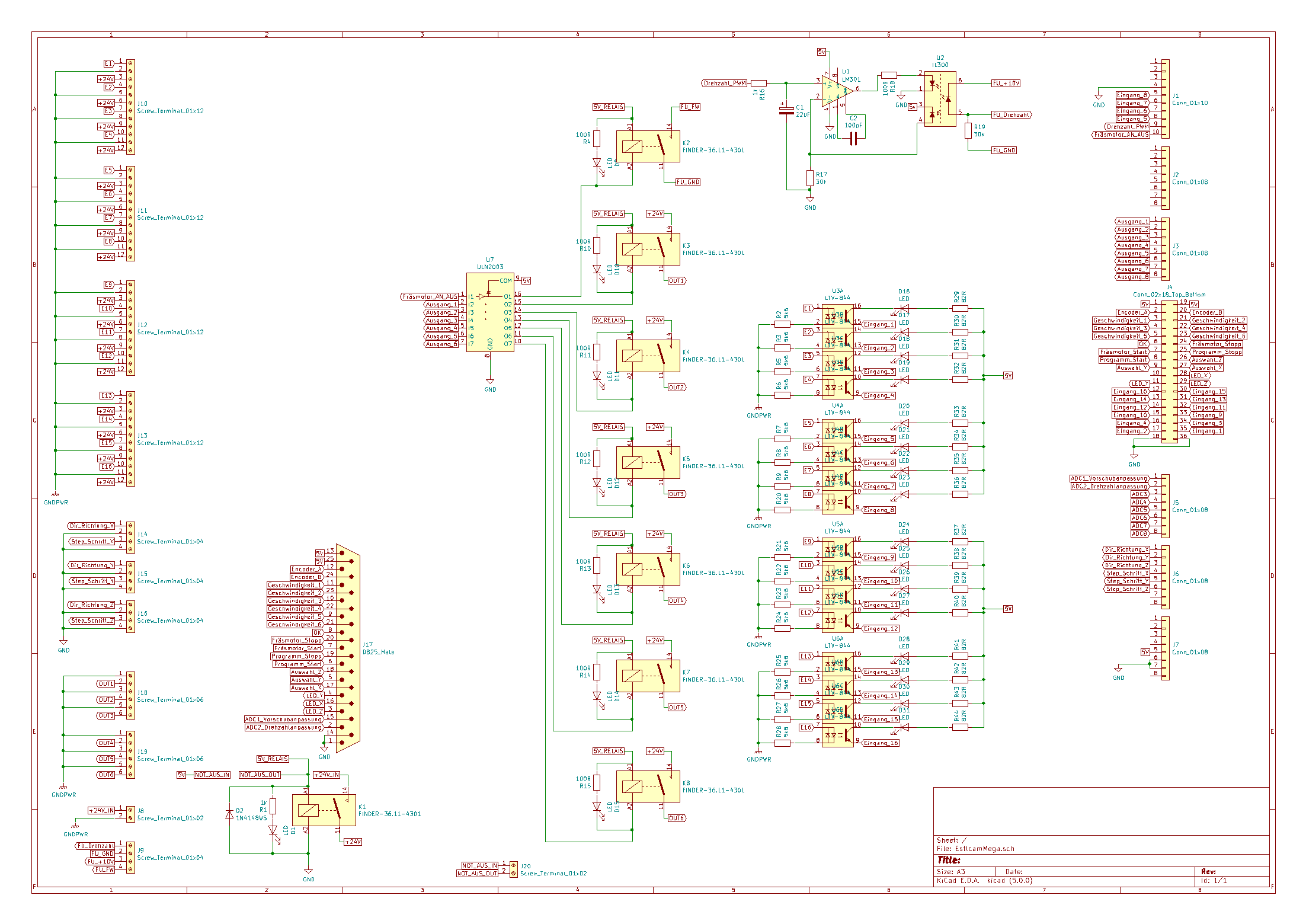
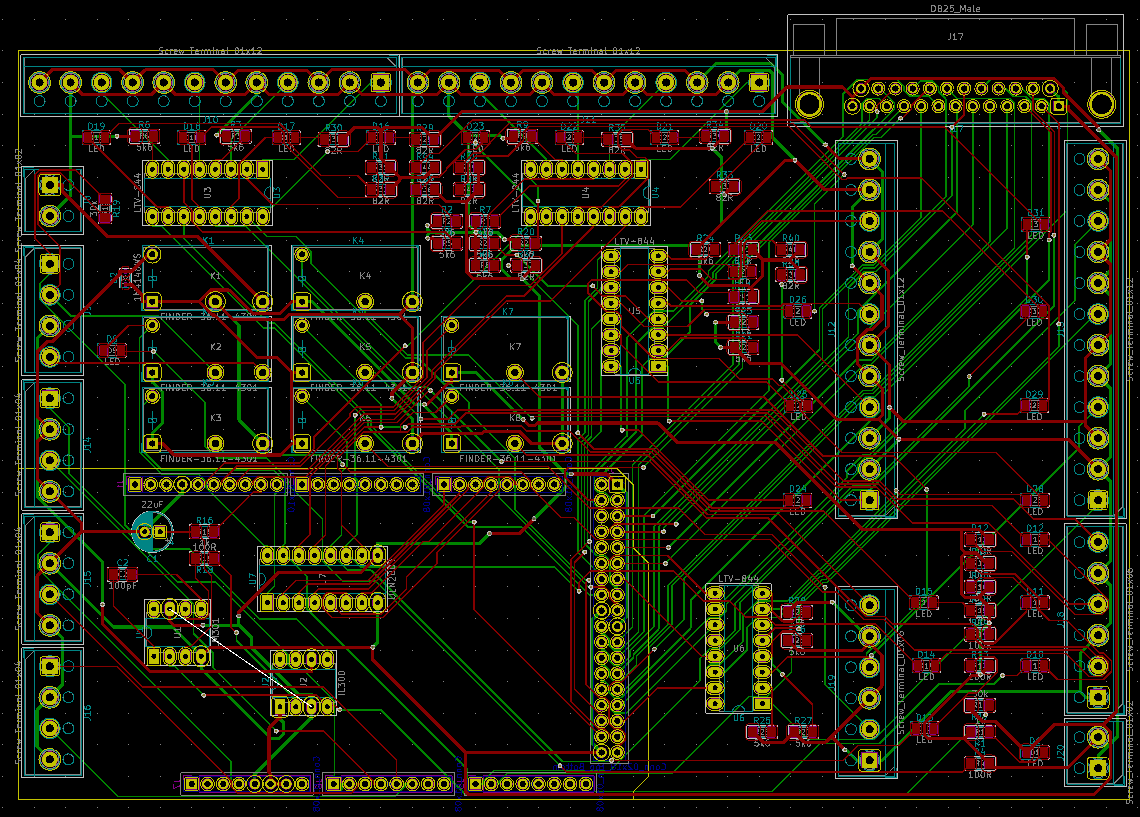
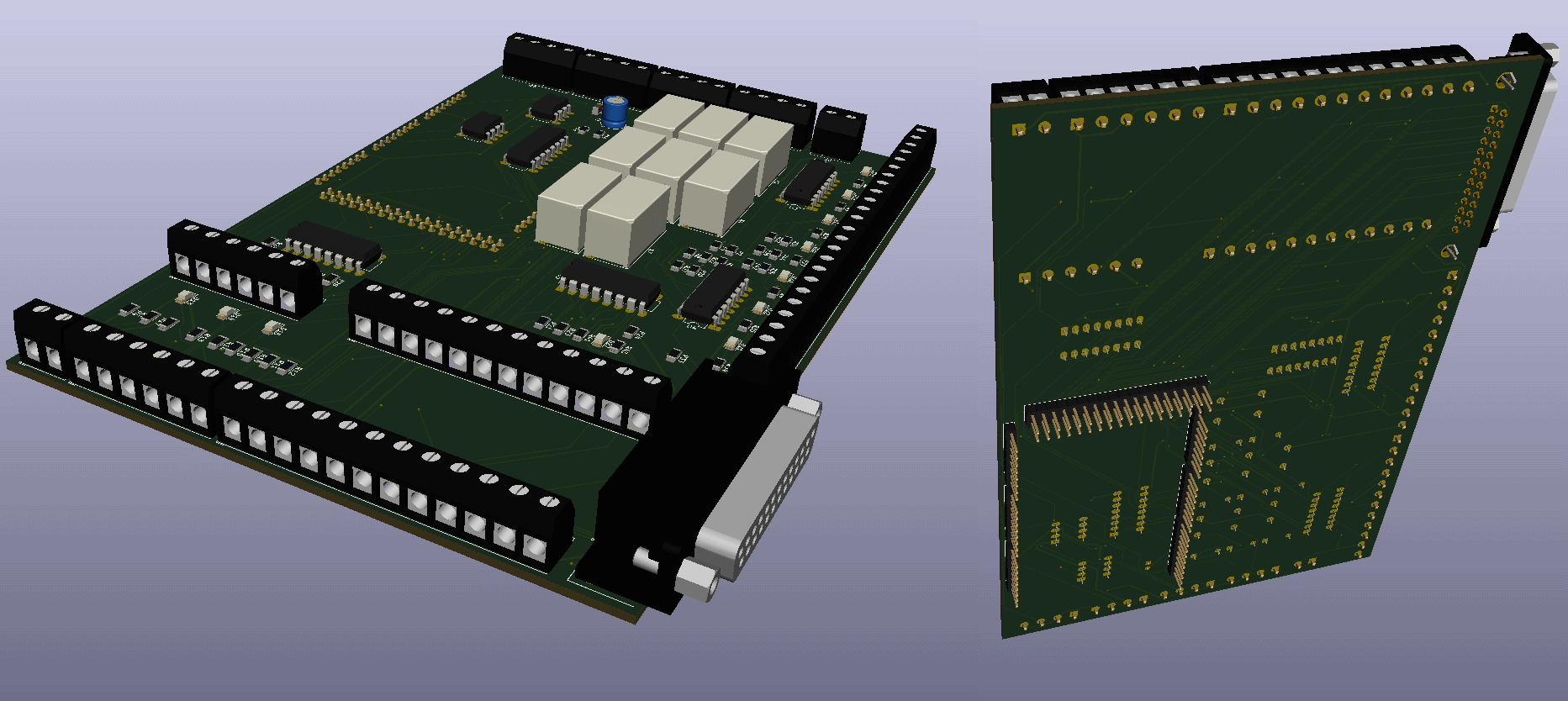
Hallo allerseits, ich habe begonnen ein Shield für den Arduino Mega zu designen, um damit eine CNC-Fräse über Estlcam ansteuern zu können. Ich komme aus der Automatisierungstechnik. Mit dem Projekt versuche ich auch, mein Wissen auf dem Gebiet der Geräte weiter auszubauen. Von Estlcam gibts fertige Platinen für den Arduino Nano. Damit lassen sich jedoch nur zwei digitale Ausgänge ansteuern, da ich die Fräse aber nach und nach erweitern möchte, wird das nicht ausreichen. Im Laufe der Zeit soll die Fräse um weitere Funktionen wie zum Beispiel Absaugung, Minimalmengenschmierung und Vakuumtisch erweitert werden. Bei meiner Recherche habe ich herausgefunden, dass es sinnvoll ist eine galvanische Trennung zum Arduino zu haben. Als Grundlage habe ich versucht den "Estlcam Klemmen Nano" mittels des im angefügten Bildes zu Reverse-Engineeren. Die Endlagen und Ausgänge sollen von aussen mit 24V versorgt werden. Könnte die Schaltung so funktionieren? Sind die Bauteile korrekt dimensioniert? Was mir jetzt noch fehlt, ist die galvanische Trennung zu den Schrittmotortreibern. Die PWM-Frequenz liegt bei bis zu 160kHz. Welches Bauteil würde sich dafür eignen, bzw. ist eine galvanische Trennung überhaupt notwendig? Erstellt habe ich das Ganze mit KiCad 5. Ich hoffe es ist nicht alles komplett falsch und freue mich über jeden Beitrag.
Angehängte Dateien:
-

klemmen_adapter_800.jpg
110 KB -

schaltplan.png
60 KB -

pcb.png
81 KB -

platine.png
110 KB
Ich bin überrascht, das keiner was zu meckern hat. Mir würde es schon helfen wenn euch Kleinigkeiten auffallen. Ich fordere nicht von einer Person die Gesamtkorrektur.
Rene B. schrieb: > Ich bin überrascht, das keiner was zu meckern hat. Na gut, wenn sonst keiner meckert, dann eben ich ... Wieviel Strom ziehen denn die Relais? Ein dicker Elko würde keinesfalls schaden um die Einschaltpulse zu stützen. Die dünnen Leitungen für die Schaltströme sekundär würde ich mir auch gut überlegen .... Dann hätte ich Angst dass die Relais per Induktionstrom den Arduino mit seinen empfindlichen CMOS-Schaltungsstrukturen sören könnte. Ist zwar schön kompakt aufgebaut, aber ich würde die Relais weit, weit vom Conroller absetzen. Dann brauchst du für solche stromintensiven Dinge eine durch- gehende Massefläche. Sollte deine Masseverdrahtung (ich habe sie nicht nachvollzogen) eine Punkt-zu-Punkt-Verbindung dar- stellen wird das auf keinen Fall vernünftig funktionieren. Also aus meiner Sicht: Erase and rewind.
Die Geschichte mit den LEDs an den Optokopplern kann so nicht klappen. Wo soll der Strom für die LEDs hinfliessen? In einen uC Eingang? Wohl kaum. Wenn der Optokoppler gegen Plus schaltet fehlen mir noch Pulldowns für die Eingänge wenn der Transistor NICHT leitet.
Rene B. schrieb: > Was mir jetzt noch fehlt, ist die galvanische Trennung zu den > Schrittmotortreibern. Eigentlich alle gängigen Schrittmotortreiber haben Optokoppler eingebaut. Außer diese kleinen Boards für die 3D Drucker. Aber du sprachst ja von einer richtigen Fräse ;)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.