Hallo, lege im Moment einen Mechanismus aus. Dieser Mechanismus soll mit ca. 15 Nm mit einem Schrittmotor angetrieben werden. Dabei ist die Positionsgenauigkeit sehr wichtig (<1°). Für die Erreichung des notwendigen Drehmomentes ist auf jeden Fall ein Untersetzungsgetriebe notwendig. Meine erste Frage wäre was bei der Auswahl des Schrittmotors berücksichtigt werden muss? Wie wirkt sich die Übersetzung des Getriebes auf die Genauigkeit aus (ich vermute, dass es zu einer höheren Genauigkeit führt) Wie kann die Genauigkeit des Getriebes ausgelegt werden bzw. welche Parameter müssen beachtet werden, um ein hochpräzisionsgetriebe zu gestalten? Für die Antworten bedanke ich mich im Voraus.
Angehängte Dateien:
-

DSCN5296.JPG
230 KB -

DSCN5297.JPG
200 KB

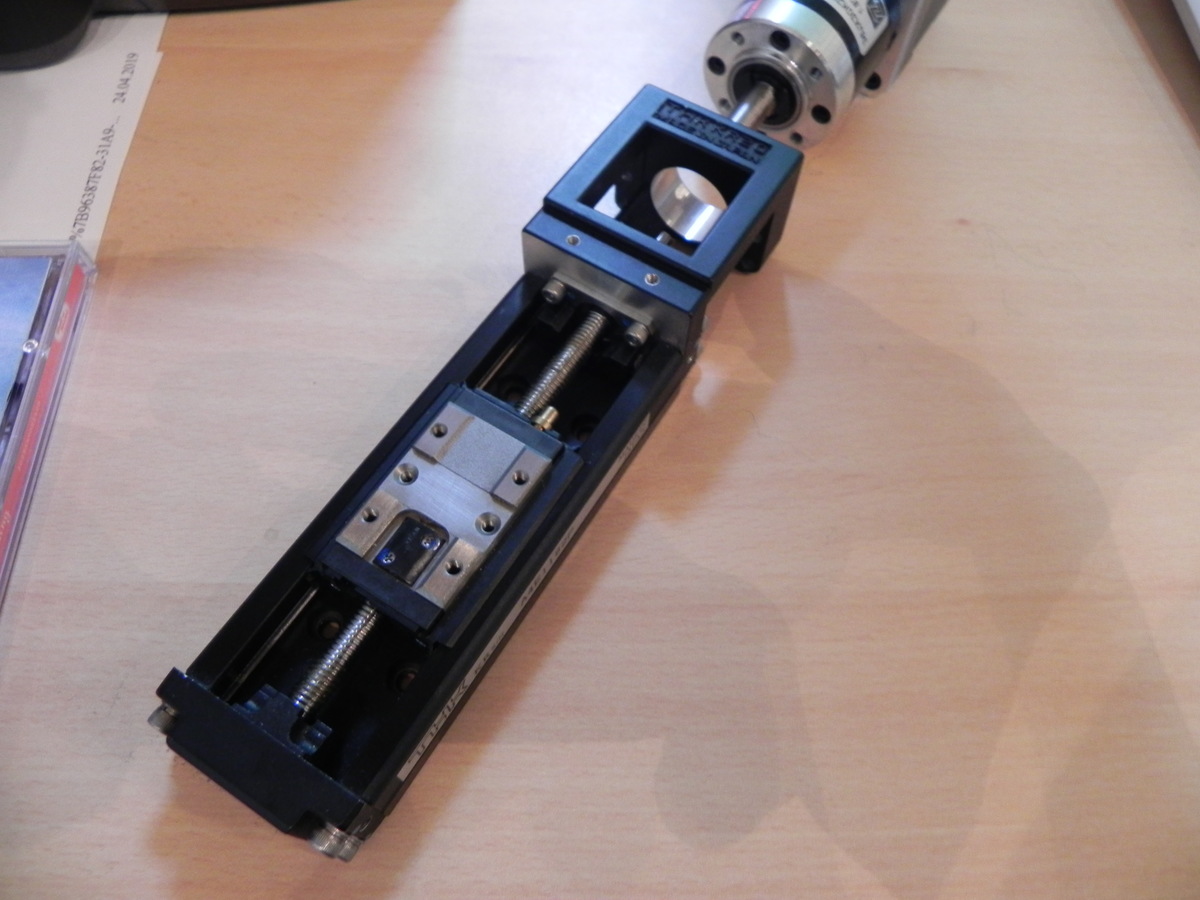
Hallo, witzig... auch meine Initialen sind M.S. :-) Also, ich würde da so einen Stepper mit angeflanschtem Getriebe nehmen, schon die kleinen hier (siehe Foto) sind schon ganz kräftig, die gibt es mit Sicherheit auch noch ne Nummer größer. Die Genauigkeit wird schon höher, aber bedenke bitte das es auch auf die Anwendung ankommt. Bei CNC-Anwendungen, Teilapparaten usw. muss nämlich auch das Umkehrspiel der Zahnräder mit beachtet werden, Software wie Mach3 z.B. stellt hierfür einen anpassbaren Kompensationswert bereit. Ich weis ja nicht ob es sich bei deinem Mechanismus um eine Dreh- oder Linearbewegung handelt. Für Linear-Bewegungen gibt es natürlich ganz präzise Mechaniken, manchmal sind solche Sachen auch bei einem großen Auktionshaus zu bekommen, sicherlich wird so manches Teil auch aus Industrieanlagen / Chip- oder Solarzellenfertigung ausgebaut und da gibt es so genaue Sachen das es unglaublich ist... Du solltest mal schreiben was genau du vorhast, eventuell gibt es noch einfachere Lösungen, z.B. Zahnriemengetriebe o.ä. mfG Michael S.
Die Anwendung ist, dass ein Mechanismus auf ein Bauteil eine Belastung aufbringt. Das bedeutet die Geschwindigkeit ist sehr gering (ca. 2°/sec. oder weniger) Das wichtigste ist die Genauigkeit, das Drehmoment (ich habe bei dem NEMA - 17 mit Getriebe gesehen, dass er 4,8 Nm hat, das wäre zu wenig). Der Aufbau sollte kompakt sein. Ich wollte auch den NEMA 17 nehmen, allerdings kam bei mir ein ziehmlich großes (10 cm x 30 cm) zweistufiges Getriebe heraus. Mich würde interessieren wie groß der Kugelgewindetrieb mit dem Motor zusammen (Länge, Breite) ist?
M. S. schrieb: > Das wichtigste ist die Genauigkeit, das Drehmoment (...). Was willst du damit sagen? Um bei einem Getrieb hohe Genauigkeit zu erreichen, muss es immer an der gleiche Flanke der Zahnräder die Kraft übertragen, also das Drehmoment darf nicht das Vorzeichen wechseln. Sonst kommt das Umkehrspiel als zu kompensierender Fehler dazu. Bei einem Schrittmotor wird die Position durch den (drehmomentabhängigen) Lastwinkel gegenüber der Nennposition verschoben. Ein entsprechend genauer Absolutencoder auf der Zielwelle, zusammen mit einem Regelkreis, kann die Genauigkeit des Antriebs erhöhen.
Angehängte Dateien:
-

Abmessungen.JPG
240 KB -

THK_KR20.JPG
20 KB -

laborboy.JPG
39 KB


Hallo, bitte sehr - die Maße des Teiles. Bezeichung ist: THK KR20, Made in Japan. Wenn du Tante Gooogle interviewst findest du alle benötigten Info´s & Bilder dazu.. Was mir noch eingefallen ist - ich stand vor nicht allzulanger Zeit selber mal vor dem Problem eine relativ genaue aber auch kräftige Hub-Lösung zu finden, es ging um das mm-genaue Anheben einer Oberfräse relativ zum Frästisch. Ich habe mich dann für so einen Labor-Lifter / Labor-Boy entschieden, funktioniert einwandfrei und war simpel zu montieren. Gibt es ab 15,- € bis.... oben offen ;-) mfG & schönen Sonntag noch, Michael S.
Wolfgang schrieb: > Was willst du damit sagen? Bei dem Mechanismus ist es wichtig, dass das Moment mindestens 15 Nm beträgt. Außerdem muss die Genauigkeit <1° betragen. > Um bei einem Getrieb hohe Genauigkeit zu erreichen, muss es immer an der > gleiche Flanke der Zahnräder die Kraft übertragen, also das Drehmoment > darf nicht das Vorzeichen wechseln. Sonst kommt das Umkehrspiel als zu > kompensierender Fehler dazu. Ich würde gerne den Schrittmotor mit einer Sinusfunktion als Eingangssignal antreiben. Es wäre auch gut, wenn die Genauigkeit überall gewährleistet werden könnte. Sie muss aber vor allem im positiven Bereich der Sinusfunktion sein. > Bei einem Schrittmotor wird die Position durch den > (drehmomentabhängigen) Lastwinkel gegenüber der Nennposition verschoben. > > Ein entsprechend genauer Absolutencoder auf der Zielwelle, zusammen mit > einem Regelkreis, kann die Genauigkeit des Antriebs erhöhen. Das ist mir bewusst, weshalb ein Absolutencoder auf der Zielwelle geplant ist.
Michael S. schrieb: > Hallo, > > bitte sehr - die Maße des Teiles. > > Bezeichung ist: THK KR20, Made in Japan. > > Wenn du Tante Gooogle interviewst findest du alle benötigten Info´s & > Bilder dazu.. Sehr interessanter Mechanismus. Ich vermute er hat zu wenig Drehmoment und ich hätte keinen Platz für das Getriebe. > Was mir noch eingefallen ist - ich stand vor nicht allzulanger Zeit > selber mal vor dem Problem eine relativ genaue aber auch kräftige > Hub-Lösung zu finden, es ging um das mm-genaue Anheben einer Oberfräse > relativ zum Frästisch. Ich habe mich dann für so einen Labor-Lifter / > Labor-Boy entschieden, funktioniert einwandfrei und war simpel zu > montieren. > Gibt es ab 15,- € bis.... oben offen ;-) Danke für den Vorschlag. Ich muss aber eine Drehbewegung erzeugen. Es würde auch mit einem KGT gehen, um es dann in die Drehbewegung zu überführen, es müsste nur eine entsprechende Last aufbringen können. > mfG & schönen Sonntag noch, > > Michael S.
Hallo, Die Getriebe mit der höchten Untersetzung/ Bauraum sind: 1. Harmonic drive (SEHR teuer) 2. Planetengetriebe (etwas teuer) 3. Schneckenradgetriebe (Schlechter Wirkungsgrad, relativ hoher Verschleiß) Worauf du bei der Auslegung des Getriebes achten solltest: 1. Fertiges Getriebe kaufen (sonst rechnet man sich insbesondere bei der Belastung der Zahnräder zu Tode). 2. Sich überlegen, wie viele Betreibsstunden das Teil aushalten soll, bis es kaputt ist (Kann die Größe massiv beeinflussen). 3. Sich überlegen, welches Umkehrspiel das Getriebe haben darf. Wenn du nur Kraft in eine Richtung aufbringen möchtest, ist das Spiel quasi egal, man muss es nur softwareseitig irgendwie kompensieren. Des weiteren: 4. Nicht nur an das Getriebe denken: Je nachdem gegenüber was die 1° eingehalten werden müssen, kann auch schon die Torsion der dazugehörigen Unterkonstruktion /Rahmen/Whatever weitaus mehr als 1° ausmachen. Bei der Positionierung vom Sensor etc. beachten. 5. Was ist mit "Genauigkeit" vom Getriebe gemeint? Natürlich werden durch die Untersetzung die Schritte vom Schrittmotor abtriebsseitig kleiner. Man bekommt durch die Abrollbewegung der Zahnflanken natürlich etwas Ungenauigkeit. Diese dürfte aber weit unter 1° liegen, sonst ist das Getriebe kaputt ^^. Und man bekommt halt Umkehrspiel (s.o.) 6. Für welchen Anwendungszweck ist der ganze Spaß eigentlich? Kleines Rechenbeispiel: Bei nem Nema17 mit angenommenen 0,3 Nm Drehmoment (vllt. etwas optimistisch) und 90% Wirkungsgrad (ebenfalls optimistisch) bräuchtest du i_min= 15Nm /(0,3*0,9)Nm=56 als Untersetzung. Damit würde prinzipiell z.B. so ein Planetengetriebe gehen: https://www.ebay.de/itm/Nema-17-Schrittmotoren-Planetengetriebe-5-1-10-1-15-1-20-1-25-1-30-1-40-1/232793617889?hash=item363394b5e1:m:msuyKYQvv08cAGHveOyhqjA&var=532305541609 Finde allerdings die Angaben von dem Anbieter leicht "unseriös". Gibt es aber bestimmt auch von Herstellern aus DE. Oder man schaut mal bei Maedler wegen Planetengetrieben: https://maedler.de/product/1643/1331/1978/1367/schneckengetriebe-hi-bis-226-nm-i751-bis-1001 ..Und realisiert, dass die "kleinen" Getriebe einfach ne be**** Wirkungsgrad bei der geforderten Untersetzung haben. ..Und überlegt, ob man nicht vllt doch nen Nema 23 Motor nimmt, um nen kleineres Getriebe nutzen zu können, da der Motor mehr Drehmoment schafft. Es grüßt Der Test
M. S. schrieb: > Ich würde gerne den Schrittmotor mit einer Sinusfunktion als > Eingangssignal antreiben. Es wäre auch gut, wenn die Genauigkeit überall > gewährleistet werden könnte. M. S. schrieb: > Das ist mir bewusst, weshalb ein Absolutencoder auf der Zielwelle > geplant ist. Die Genauigkeit ist dann keine Frage an den Schrittmotor, sondern an deinen Sensor+Regelkreis. Ein vernünftiger Regelkreis beseitigt dann auch Fehler durch schwankenden Lastwinkel. Nur Getriebespiel mag der gar nicht gerne.
Starlord schrieb: > Schrittmotor mit Regelung: > Google EZI Servo Vielen Dank für den Vorschlag. Ich suche die Preise, kann aber nicht finden, gibt es keinen Katalog mit den Preisen? Was müsste beachtet werden, um selber ein Präzisionsgetriebe zu konstruieren?
M. S. schrieb: > Was müsste beachtet werden, um selber ein Präzisionsgetriebe zu > konstruieren? Hast du den Post von mir gelesen? Ein fertiges Getriebe "von der Stange" dürfte bei deinen Anforderungen völlig ausreichen und einige Zehnerpotenzen günstiger sein als ne Sonderanfertigung. Fertige Getriebe gibt es in allen Formen und Qualitätsklassen. Such dir was passendes raus. Bereits eine stark vereinfachte eigene Berechnung /Auslegung eine Getriebes umfasst die Vorherige Berechnung/Auslegung sämtlicher Lager, Zahnräder (Flankengeomentrie etc.) Das sind locker mal einige Seiten alleine an vorheriger Auslegung. Bei nem richtigen Präzisionsgetriebe muss das Abwälzverhalten der Zahnräder bei sämtlichen Toleranzkombinationen, Temperaturverteilungen, externen Kräften etc. simuliert werden. Außerdem noch die Steifigkeit des Ganzen unter Last. Um das Sauber hinzubekommen benötigt man wohl einige Jahre Erfahrung als Getriebeentwickler.
testi schrieb: > Hast du den Post von mir gelesen? Ein fertiges Getriebe "von der Stange" > dürfte bei deinen Anforderungen völlig ausreichen und einige > Zehnerpotenzen günstiger sein als ne Sonderanfertigung. Fertige Getriebe > gibt es in allen Formen und Qualitätsklassen. Such dir was passendes > raus. > > Bereits eine stark vereinfachte eigene Berechnung /Auslegung eine > Getriebes umfasst die Vorherige Berechnung/Auslegung sämtlicher Lager, > Zahnräder (Flankengeomentrie etc.) > Das sind locker mal einige Seiten alleine an vorheriger Auslegung. > > Bei nem richtigen Präzisionsgetriebe muss das Abwälzverhalten der > Zahnräder bei sämtlichen Toleranzkombinationen, Temperaturverteilungen, > externen Kräften etc. simuliert werden. Außerdem noch die Steifigkeit > des Ganzen unter Last. Um das Sauber hinzubekommen benötigt man wohl > einige Jahre Erfahrung als Getriebeentwickler. Das ist ein Wort!! Trotzdem würde mich der Preis interessieren!
Ich benötige noch einen Schrittmotor. Die Daten sind ähnlich wie oben mit der Änderung, dass das Drehmoment 60 Nm betragen soll. Die radiale Last beträgt 3000 N. Weiß jemand welcher Hersteller möglichst kompakte und leichte Schrittmotoren mit einem Präzisionsgetriebe anbietet?
Immer wieder Harmonic Drive. An welcher Stelle sind denn die 3000N ?
An der Abtriebswelle! Es wird eine Last auf diese Welle eine Last gelegt, welche radial wirkt, wodurch keine axiale Belastung stattfindet. Was meinst du mit Harmonic Drive?
M. S. schrieb: > Was meinst du mit Harmonic Drive? Google kaputt? Ein harmonic Drive ist eine Art Planetengetriebe. Allerdings gibt es nur ein Planetenrad, welches selbst ein Hohlrad (Mit Gleitfläche innen) ist und sich verformen kann. Das Sonnenrad hat eine Elliptische Form (ist aber Zahnlos). Durch diese Bauweise sind einstufige Übersetzungen von über 300:1 möglich. Da kommen selbst Schneckenräder nur schwer mit, da es obendrein sehr wenig Bauraum benötigt. Es dreht jedoch die Wirkrichtung um, anders als das Planetengetriebe, das muss man beachten. Außerdem ist es nicht selbsthemmend, im Gegensatz zum Schneckengetriebe und man hat keine Winkeländerung. Durch den speziellen Aufbau ist es sehr Kostenintensiv und wird deshalb nur dort angewendet, wo es nicht anders geht.
Gibt es das Harmonic Drive System auch mit einem Schrittmotor (quasi als ein Paket) oder müssen diese beiden Komponenten seperat gekauft werden?
Ich bin leider immer noch dabei den benötigten Motor zu bestimmen und habe folgendes Problem: Bei dem bereits erwähnten EZI-servo motoren steht im Katalog, dass es ein zulässiges Drehmoment gibt. Das Drehmoment ist dabei, wie bei allen solchen Motoren Drehzahlabhängig. Ich verstehe leider nicht, ob dieses zulässige Drehmoment auch von der Drehzahl abhängig ist und falls ja, wie kann bestimmt werden bei welcher Drehzahl dieses Moment auftritt?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.