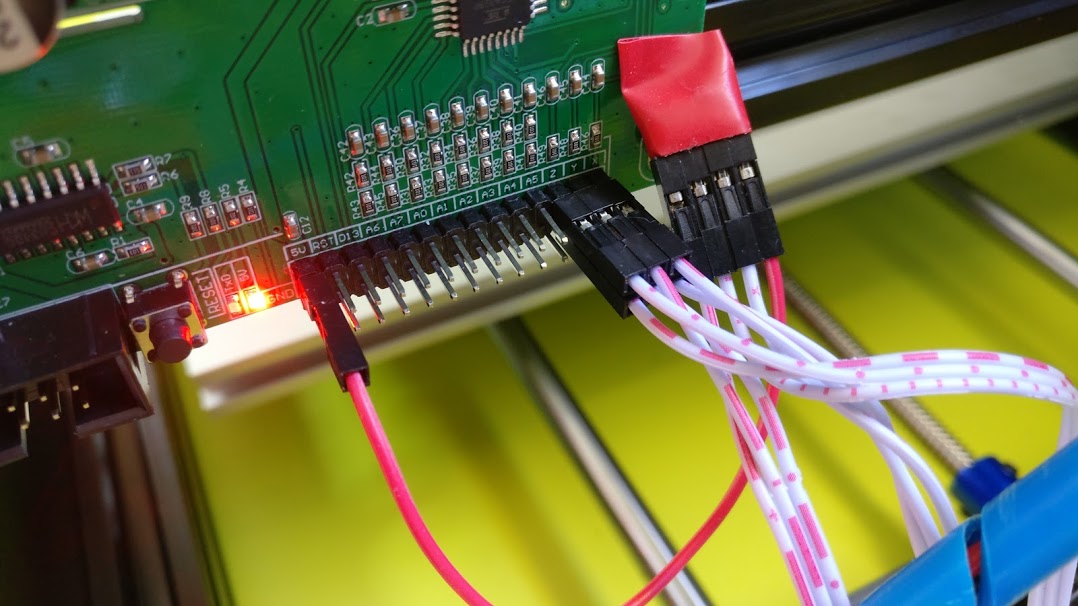
Hallihallo, Ich habe mir eine kleine CNC Fräse gekauft. CNC 3018 pro. Mit dem 3D Drucker habe ich bereits die Arduino Platine (Cam Tool v3.3 CNC) eingepackt und einen ordentlichen Lüfter dran gepackt. Dazu habe ich mir noch eine 500W Spindel aus China bestellt und soweit läuft alles. Die Feinheiten lerne ich gerade noch. Einen Not Stop habe ich ebenfalls verbaut und nun bin ich an den End bzw. Home Switches angelangt. Zuerst wollte ich die doch glatt zwischen die Stepper Motoren schalten und kam dann irgendwann mal drauf, dass dann nichts mehr geht, sobald der Schalter einmal betätigt wurde :-) ... Ein wenig Recherche hat geholfen und so sieht man, dass fast alle Boards Anschlüsse haben, die dafür genutzt werden. Ich bin nun auf einer Seite fündig geworden und leider total verwirrt. Auf dem Foto sieht man die Verkabelung mit optischen Endschaltern, was zu meinen mechanischen Schaltern (normal open) bis auf 5V kein Unterschied sein sollte. Jedoch stellen sich mir ein paar Fragen. 1. Ich habe alle Szenarien durch probiert - mit einem Jumper. Keine Achse will bei mir stoppen - egal ob ich den Jumper setze oder ziehe. 2. Selbst wenn das funktionieren würde, frage ich mich, wie das gehen soll, da ich doch sowohl für X, Y oder Z jeweils 2 Endschalter habe und meine Software gerade beim "Homing" wissen muss, ob bei X bzw. Y dann der rechte oder linke bzw. hintere oder vordere Schalter gemeint ist. Denkfehler? Ich sage "2.", weil ein anderes Woodpecker CNC board genau diese separaten Anschlüsse hat: https://cloud.githubusercontent.com/assets/5912573/22929087/89c715ce-f2c2-11e6-9ffc-6f078f510d74.jpg Hoffentlich kann mir hier wer helfen, ich möchte dieses "Projekt" endlich zum Abschluss bringen und mich voll und ganz aufs Fräsen konzentrieren :-)
Angehängte Dateien:
{kind=link}
Von dem konkreten Board habe ich keine Ahnung. Bei meiner Maschine ist das aber so, und ich glaube das ist auch üblich, dass man nur einen Endschalter montiert, der dann angefahren wird. Wie weit es von da aus in die andere Richtung geht, kann man ja dann konfigurieren. Auch wenn du 2 Schalter montierst, weiß die Software welchen sie anfährt, auch wenn sie am selben Anschluss hängen, da sie ja weiß in welche Richtung sie gefahren ist.
Das Problem ist, dass ich alle Szenarien ausprobiert habe und während die Stepper Motoren X oder Y liefen, habe ich einen Jumper auf die Pins gesteckt, es tat sich jedoch rein gar nichts :-/
Welche FW ist den da drauf ? GRBL ? dann müsstest du die Endstops erstmal in der FW Aktivieren, wenn du $$ an die Steuerung sendest sollte sie die Einstellungen zurücksenden. Wenn du das stoppen im betrieb brauchst also nicht das Homing sondern als Art Notstop müsstest dann wahrscheinlich dann GRBL neu Compilieren mit den passenden Einstellungen da es nicht Default ist.
K. J. schrieb: > Welche FW ist den da drauf ? GRBL ? dann müsstest du die Endstops > erstmal in der FW Aktivieren, wenn du $$ an die Steuerung sendest sollte > sie die Einstellungen zurücksenden. > > Wenn du das stoppen im betrieb brauchst also nicht das Homing sondern > als Art Notstop müsstest dann wahrscheinlich dann GRBL neu Compilieren > mit den passenden Einstellungen da es nicht Default ist. Danke! Das wusste ich nicht. Super Anhaltspunkt. Jetzt kann ich wenigstens mal weiter googlen, wie das gemacht wird. Ich ging eigentlich davon aus, dass ich im 1. Moment einfach die Pins kurzschließe und das hardwareseitig abläuft. "Freischalten" :-) ... Ja, ist GBRL!
Vielleicht ist es auch NO(Normally Open) anstatt NC(Normally Close). Hast du das überprüft?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.