Guten Abend Zusammen, gerne würde ich meinen Bollerwagen mit einem BLDC Motor ausstatten, damit ich ihn vollgepackt besser vom Haus an den Rhein fahren kann, den Berg hoch. Ich könnte mir jetzt einfach einen 1500 W BLDC Motor kaufen, dass wird vermutlich locker reichen. Mich würde jedoch interessieren, wie ihr bei so etwas vorgehen würdet bzw. wie man den passenden Motor auswählt anhand der Daten, die beim Kauf angegeben werden. Ich würde generell so vorgehen, dass ich versuche zu ermitteln, welche Leistung / Drehmoment ich benötige und mir dann den passenden Motor besorge. Leider wird immer nur die Leistung angegeben, aber nicht das Drehmoment über die Drehzahl. Somit weiß ich dann zwar, dass der Motor genügend Leistung hat, aber nicht wieviel Drehmoment bzw. welche Übersetzung ich wählen muss. Zur Bestimmung der Leistung würde ich entweder das Drehmoment messtechnisch bestimmen, also mit einem Drehmomentschlüssel am Rad, bei vollgepacktem Wagen auf der Steigung oder indem ich über den Radabstand, die Steigung und das Gewicht, in etwa das nötige Drehmoment ausrechne. Im Anschluss würde ich dann noch einige Annahmen treffen. Dabei würde ich festlegen, wie schnell der Wagen fahren soll, in welcher Zeit er beschleunigt usw. Diese Werte addiere ich dann zu der Leistung und zum Schluss packe ich noch einmal 20 % als Sicherheit drauf. Aber sagen wir einmal ich käme auf eine Leistung von 1000 W, dann würde der folgende Motor reichen: https://hobbyking.com/en_us/turnigy-4258-brushless-motor-400kv.html Nur wie komme ich jetzt auf die nötige Übersetzung? Denn ich muss ja wissen, welches Startmoment der Motor aufbringen können muss, damit der Wagen mit der definierten Beschleunigung anfährt? Das Drehmoment ist nicht mit angegeben. Ausrechnen könnte ich es über die Leistung und die Drehzahl, nur wenn die Drehzahl = 0 ist, wäre das Drehmoment ja unendlich hoch ... Außerdem weiß ich nicht wie die M(n) Kennlinie eines BLDC aussieht. Wie komme ich in diesem Fall an die benötigten Daten? Danke schon einmal ! GRuß Alex
Alex C. schrieb: > Aber sagen wir einmal ich käme auf eine Leistung von 1000 W, dann würde > der folgende Motor reichen: > > Nur wie komme ich jetzt auf die nötige Übersetzung? Bei den Spielzeugdingern muss dir klar sein das die dort angegebnenen Leistungen nur kurzzeitig für wenige Sekunden genutzt werden könne (und das auch nur bei sehr guter Kühlung). Die Übersetzung wird sich erstmals vorrangig danach richten welche Geschwindigkeit du überhaupt erreichen willst. Für Dauerlast sehen die Preise schon etwas anders aus: z.B.: https://de.nanotec.com/produkte/2161-db80-buerstenloser-dc-motor/
Angehängte Dateien:
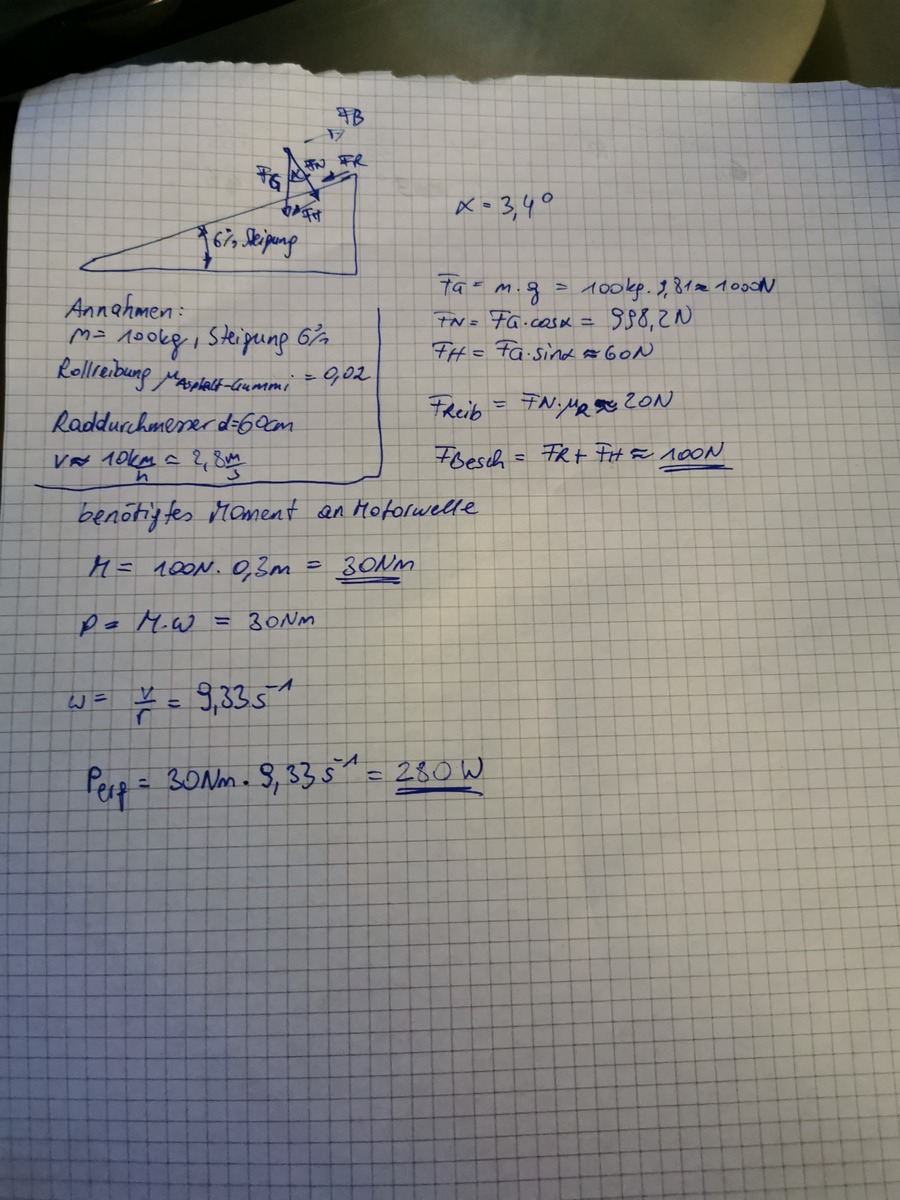
Dir fehlen einfach zu viele mechanischen Kenntnisse. Wenn du da schon Probleme hast das zu berechnen wuerde ich es nur ueberschlagsmaessig machen. 500W sollten auf jeden Fall genuegen. Ich wuerde sogar eher einen kleineren waehlen. Siehe Anhang. Dann wuerde ich auch gleich auch einen brushed Motor nehmen, weil die Ansteuerung vom BLCD etwas komplexer ist, falls du das auch noch selbst machen willst. Da koennen dir andere aber sicher bessere Information dazu geben.
> Leider wird immer nur die Leistung angegeben, aber nicht das > Drehmoment über die Drehzahl. Solch ein Motor ist permanenterregt, also ist das erreichbare Drehmoment bei allen Drehzahlen (inklusive Stillstand) gleich dem Nenndrehmoment. Dieses MUSS angeben sein, zumindest implizit aus Nennleistung und -drehzahl. (Sonst wäre alles "Fake".) (Hätte man einen permanenterregten DC-Kollektormotor, hätte man dasselbe Verhalten; bei einer Neben- bzw. Reihenschlussmaschine sähe es anders aus.) Dieses gegebene Drehmoment passt meistens nicht zum gewünschten Antriebsdrehmoment, das muss dann ein (meist: Untersetzungs-) Getriebe anpassen.
Alex C. schrieb: > https://hobbyking.com/en_us/turnigy-4258-brushless-motor-400kv.html Du hast gelesen was da steht: "For 2500-3000g 3D model airplane." Dein Bollerwagen bewegt sich also hoffentlich mit 70-150km/h um den notwendigen Luftstrom zur Kühlung zu erreichen.
Elektrofan schrieb: > Solch ein Motor ist permanenterregt, also ist das > erreichbare Drehmoment bei allen Drehzahlen (inklusive Stillstand) > gleich dem Nenndrehmoment. Elektrofan schrieb: > Hätte man einen permanenterregten DC-Kollektormotor, hätte man > dasselbe Verhalten Aha :-)
> Solch ein Motor ist permanenterregt,
Gemeint war damit natürlich der BLDC-Motor von ganz oben. ;-)
@ Irgend W Danke für den Hinweis. Ich bin schon davon ausgegangen, dass die Leistung nicht dem Dauerbetrieb entspricht, deshalb würde ich den Motor auch wie ich vorher beschrieben habe, überdimensionieren, um noch eine Leistungsreserve zu haben. Ich werde natürlich auch die entsprechende Geschwindigkeit berücksichtigen. Der Raddurchmesser ist Konstant. Über die Geschwindigkeit die ich möchte (z.B. 1,5 m /s ), bekomme ich die Drehzahl des Rades. Kenne ich die Drehzahl des Motors, kann ich mir daraus die erforderliche Übersetzungs ausrechnen. Sagen wir mal ich bekomme eine Übersetzung von 50 raus, dann muss ich das Drehmoment, welches am Rad benötigt wird durch 50 dividieren, um auf das Motordrehmoment zu kommen. Wenn der Motor bei der angegebenen Drehzahl jedoch nicht das Drehmoment erreicht, kann ich nicht in der Zeit beschleunigen und auch nicht halten. Deshalb muss ich das Haltemoment des Motors kennen. Nur wird dies auf den Datenblättern nicht angegeben. Klar bei Maxon Motors oder Nanotec natürlich schon. Aber weiß Jemand wie ich z.B. das Drehmoment bei den von mir geposteten Motor herausfinde? @Schueler Danke für die Rechnung. Wieso sagst du mir würden mechanische Kenntnisse fehlen? Ich habe die Hangabtriebskraft genauso berechnet wie du. Es ging ja nicht rein um die mechanische Seite. Wenn ich einen Motor auslege, brauche ich nur zwei Dinge. Wieviel muss er leisten und wieviel kann er leisten. Mehr benötige ich nicht. Was er können muss ist ja: Pges = Pa+Palpha+Pv Pges = Gesamtleistung Pa = tranlatorische Beschleunigung, dafür benötige ich die Zeit bis er auf Geschwindigkeit sein soll also a = v/t und die Massse die translatorisch bewegt wird. Palpha = rotatorisch beschleunigte Massen, also z.B. Räder usw. Wobei man die in diesem Fall vernachlässigen kann. Deshalb rechne ich als sicherheit einfach noch mal 20 % oben drauf. Pv = Vollbeharrungsleistung also welche Leistung muss der Motor im stationären Betrieb leisten. Das sind hauptsächlich Reibungsverluste und die Rollreibung der Räder und die Gravitation (m*g*cos(x)). Sagen wir es kommen dabei 400 W raus, dann weiß ich ja, dass der Motor das schafft. Wenn ich nun die Übersetzung über die Geschwindigkeit ausrechne, kann ich dann definitiv davon ausgehen, dass hinter dem Getriebe eine Drehmoment anliegt, dass der Motor auf jedenfalls schafft, da ich alles auf die Leistung bezogen habe? Weil dann wäre der Ansatz von Irgend W richtig es einfach auf die Geschwinidgkeit zu beziehen und auf das Drehmoment zu pfeifen, weil es reichen muss? @Udo Gut, dass mit den 4000 rpm/v ist natürlich ein Punkt. Dann würde der Motor sich bei 12 V mit extermer Drehzahl drehen und ich bräuchte eine riesige Übersetzung. Leistungstechnisch würde es dann aber gehen. Den Motor habe ich auch nur einfach mal als Beispiel herausgesucht. Ich hatte noch keine Zeit mal zu gucken ob es auch Motoren mit geringerer Steigung gibt. Das Nenndrehmoment, ist jedoch auch nicht angegeben, wobei ich auch nicht genau weiß was damit gemeint ist. Bei Asynchrommotoren ist der Nennpunkt denke ich die Drehzahl bei der der Motor im Dauerbetrieb laufen kann. Beim Verbrenner ist es das maximale Moment, beim BLDC? Leider weiß ich immer noch nicht, wie ich am besten den richtigen Motor und Übersetzung finde. Also ohne einfach einen zu starken zu nehmen. Mir geht es hauptsächlich um die Überlegung und das Vorgehen dahinter.
Hallo, ich möchte mal ergänzen, dass du für so einen Motor mit >1k rpm nen ganz ordentliches Getriebe brauchst. Außerdem wurde ja schon von anderen genannt, dass das Teil nicht dauerlastfähig ist. Ich würde eher Nabenmotoren von/für Pedelecs empfehlen. Die haben schon in etwa die passende Drehzahl,schaffen >200W (was für nen Bollerwagen ausreichen dürfte) und kosten gebraucht unter 50€ MfG
Hallo Alex, schau doch mal in diesen Shop: http://shop.mat-con.net/epages/62158737.sf/de_DE/?ObjectPath=/Shops/62158737/Categories/Gleichstrom-Motoren Da findest du auch Motoren mit angeflanschtem Getriebe und allen gewünschten Daten inkl. Kennlinien.
@jemand Gut, solch ein Motor wäre evt. auch was. Der hat vermutlich eine hohe Polzahl und deshalb von Haus aus eine geringere Drehzahl und dafür mehr Drehmoment? Als "Getriebe" würde ich einfach einen Riemen oder eine Kette nehmen und von einem kleinen auf einen großen Pulley übersetzten. Was ich generell noch nicht ganz verstanden habe an der Kommutierung ist dieser kV Wert. Soweit ich verstanden habe, sagt mir diese Motorkonstante, um wieviel sich die Drehzahl ändert, wenn ich die Spannung erhöhe richtig? Bei einem Gleichstrommotor verstehe ich, dass dieser stufenlos durch die Erhöhung der Spannung gesteuert werden kann. Nur bei einem BLDC verstehe ich es noch nicht so ganz. Also ein BLDC ist ja eine permanenterregte Synchronmachine. Das heißt ich induziere keine Spannung, sondern ich lasse ein Magnetfeld durch die Spulen rotieren. Die ziehen und drücken die Permanentmagneten im Kreis herum. Das heißt die Drehfelddrehzahl entspricht auch der tatsächlichen Drehzahl. Wenn ich also das Steuersignal 50 mal pro Sekunde rotieren lasse, dreht sich der Rotor 50 mal pro Sekunde, egal ob ich 14 V oder 9 V anliegen habe, richtig? Erhöhe ich die Spannung, fließt ein größerer Strom, dadurch erhöht sich das Magnetfeld, es wird eine größere Kraft ausgeübt, welches ein größeres Drehmoment verursacht? Ist die Last zu groß, bleibt der Motor einfach stehen, auch wenn sich das Feld weiter mit 50 u/s dreht. Deshalb verstehe ich nicht, wieso sich die Drehzahl von dem BLDC motor bei jedem Volt Spannungserhöhung erhöhen soll. Das kommt doch nur auf die Kommutierung an oder?
Hallo, ich habe mich jetzt mal eingeloggt (Bin der jemand von eben): Alex C. schrieb: > Was ich generell noch nicht ganz verstanden habe an der Kommutierung ist > dieser kV Wert. Soweit ich verstanden habe, sagt mir diese > Motorkonstante, um wieviel sich die Drehzahl ändert, wenn ich die > Spannung erhöhe richtig? > > Bei einem Gleichstrommotor verstehe ich, dass dieser stufenlos durch die > Erhöhung der Spannung gesteuert werden kann. Nur bei einem BLDC verstehe > ich es noch nicht so ganz. Also ein BLDC ist ja eine permanenterregte > Synchronmachine. Das heißt ich induziere keine Spannung, sondern ich > lasse ein Magnetfeld durch die Spulen rotieren. Hier ist dein Denkfehler: In einem BLDC wird auch eine Spannung induziert, nämlich durch die Relativbewegung deines Stators zu dem rotierenden Magnetfeld der Rotor-Magnete. Diese dadruch entstehende sog. "Gegenspannung" steigt proportional zu deiner Drehzahl des Motors an (Genau wie bei einer Gleichstrommaschine). Genau das sagt dir der kv-Wert: Nämlich wie viel U/V Gegenspannung der Motor schafft. Mit steigender Gegenspannung kann immer weniger Spannung über den Ohm-schen Widerstand der Wicklungen abfallen und entsprechend immer weniger Strom fließen, da diese immer weniger Spannung "sehen". Wenn die Gegenspannung dann der Betriebsspannung entspricht, fließen (rechnerisch) noch 0 A durch deinen Motor. Spätestens dann ist dein Drehzahllimit erreicht. Alex C. schrieb: > @jemand > Gut, solch ein Motor wäre evt. auch was. Der hat vermutlich eine hohe > Polzahl und deshalb von Haus aus eine geringere Drehzahl und dafür mehr > Drehmoment? Neben der Polpaarzahl ist der Hauptgrund für mehr Drehmoment der kv-Wert dieser Motoren (s.o.). Und ja- die Teile sitzen als Direktantrieb in Farradnaben drin. Die dürften mit ner 1:1-Übersetzung gehen. MfG
@Alex F. Danke für deine ausführliche Erklärung! In einfachen Worten ausgedrückt sagt mir der KV-Wert nach welcher Drehzahlerhöhung jeweils 1 V Spannung abfällt? Kann ich das ungefähr so verstehen: P= U*I -> I = P/U wobei P= const. Je größer die Gegenspannung wird, desto weniger Leistung wird in Strom umgewandelt. Je weniger Strom, desto geringer das Drehmoment. Irgendwann stellt sich dann ein stationärer Zustand ein, da nicht mehr genügend Drehmoment zur weiteren Beschleunigung zur Verfügung steht? Das habe ich einmal bei einer herkömmlichen Drehstrommaschine gesehen, dort war der Strom minimal, bei maximaler Drehzahl. Was ich nur nicht verstehe ist "Relativbewegung zum Stator", denn eigentlich hat man doch einen Synchronmotor, also keinen Schlupf wie bei der Asynchronmachine? Andererseits habe ich schon gelesen, dass die Position des BLDC Motors über bestimmte Spannungsausschläge in den Spulen ermittelt wird (Back EMF ? ), ist das quasi so eine Gegenspannung? Gibt es denn zu BLDC-Motoren eine Gleichung die den Drehmomentenverlauf beschreibt? Und hast du vielleicht Literatur, in der genauer erklärt wird, wie die Polpaarzahl, Windungsdurchmesser, Widerstand, SPannung usw. genau vom Drehmoment usw. abhängen? Denn bei einer Asynchronmaschine ist die Drehzahl ja definiert mit n = 60*f/p wobei f meist ohne einen FU konstant ist und sich somit eine konstante Drehfelddrehzahl einstellt. Bei einem BLDC würde ich sagen, dass die Drehzahl doch von der Kommutierung abhängt oder? Wenn wenn ich das Drehfeld schneller drehen lasse, indem ich die Spulen in kürzerer Zeit bestrome, dann ist es doch egal ob ich 2 Polpaare habe oder 20 Polpaare, wenn sich das Feld in beiden Fällen z.B. 100 mal pro Sekunde um den Stator dreht? Ich würde mir vorstellen, dass die Polpaare nur einen Einfluss auf das Drehmoment haben. Denn wenn sich das Drehfeld sagen wir mal mit 100 Hz im Stator dreht, ich einen Strom von 10 A in 2 Polpaaren fließen habe, dann ist das Magnetfeld und die Kraft die ausgeübt wird in jedem Pol gleich. Wenn ich bei gleichem Strom jedoch 20 Polpaare hätte, denn würden 10 mal soviel Kraft auf den Stator ausgeübt, die Drehzahl würde aber nicht höher, da sich das Feld immernoch mit den 100 Hz dreht, man hätte nur mehr Drehmoment. Kann das sein?
> Gibt es denn zu BLDC-Motoren eine Gleichung die den > Drehmomentenverlauf beschreibt? Im Idealfall: M(Phi)= const. (SCNR) Dann würde sich der magnetische Dipol des Permanent-Läufers sozusagen in einem homogenen Statorfeld drehen. Wie genau das erfüllt ist, hängt von der Mechanik ab. (Beim DC-Motor ist das prinzipiell genauso.)
Nimm die Motoren aus einem Hoverboard. Die sind erstens wesentlich günstiger und man kann sie als Direktantrieb verwenden. Und man kriegt den Motorcontroller direkt mit dem Hoverboard geschenkt dazu.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.