Liebe Leute, Ich habe als Student glücklicherweise die Möglichkeit bekommen, einen Vortrag an einer Konferenz zu halten. Dazu habe ich einen Artikel verfasst und dazu wurde eine Rückfrage von einem Gutachter gestellt: Sein Kommentar: Gutachter: Please check the resolution of the sensors. Is the position resolution of the laser sensors is 150 µm? Then, how do you solve the positioning noise in x- and y-axes? The authors mention that the position noise is the order of 176um, and what the meaning of 176um. Im Artikel habe ich geschrieben: The laser sensors offer a measurement range of 20 - 80mm and a position resolution of 150 μm. ….The position noises in x- and y axes are in the order of 176 µm. Nun meine Frage: Was meint der Gutachter genau mit seinem Kommentar? Ist das unglaubwürdig, oder warum fragt er, ob die Pos. Auflösung 150 µm ist? Und was meint er mit, wie ich das gelöst habe mit dem positionsrauschen? Hintergrund: Es ging um die Positionsregelung eines Antriebs entlang der x- und y-Koordinate. Und nachdem ich die Sprungantwort (mit einem PID-Regler) gemessen habe, habe ich gesagt, dass die Sollposition erreicht wird. Das Positionsrauschen beträgt 176 µm und liegt damit im Bereich der Messsystemauflösung.
Benjamin Wendel schrieb: > Das Positionsrauschen beträgt 176 µm und liegt damit im Bereich der > Messsystemauflösung. Was er dich fragt, ist in etwa sowas: wie kannst du mit einem Sensor, der nur 150µm auflöst, ein Rauschen mit 176µm erfassen? Oder wurde das Positionsrauschen mit einem deutlich besser auflösenden Messystem erfasst?
Lothar M. schrieb: > Was er dich fragt, ist in etwa sowas: wie kannst du mit einem Sensor, > der nur 150µm auflöst, ein Rauschen mit 176µm erfassen? Oder wurde das > Positionsrauschen mit einem deutlich besser auflösenden Messystem > erfasst? Danke für den Hinweis, aber wieso geht das nicht? Also im Grunde folgendes: Ich habe die Messdaten genommen und davon eine Standardabweichung gebildet. Und die Standardabweichung des Rauschens beträgt 176µm. War es vll. mein Fehler, dass ich den Begriff "Standardabweichung des Rauschens" nicht verwendet habe? Und gerne würde ich noch wissen, wieso das nicht geht? Wenn eine Auflösung von 150µm möglich ist, wieso kann kein Rauschen mit 176 µm erfasst werden? Die Auflösung liegt doch darunter?
Benjamin Wendel schrieb: > Und die Standardabweichung des Rauschens beträgt 176µm. Was würde denn dein Messystem samt Rechenweg für ein Rauschen ermittlen, wenn der tatsächliche Abstand laufend zwischen 2999µm und 3001µm aber demzufolge dein Messwert mangels höherer Auflösung zwischen 2850µm und 3000µm schwanken würde?
Benjamin Wendel schrieb: > War es vll. mein Fehler, dass ich den Begriff "Standardabweichung des > Rauschens" nicht verwendet habe? [Statistiktrottel ON] genau genommen ist es nicht die Standardabweichung sondern der Schätzwert der Standardabweichung. Standardabweichung: Alle vorkommenden Werte (Grundgesamtheit) werden genommen und ausgewertet. => Standardabweichung ist bekannt Schätzwert der Standardabweichung: ein Teil aller möglichen Werte (Stichprobe) wird genommen und daraus die Standardabweichung geschätzt => Kennzahl deiner Stichprobe da du die Standardabweichung nur für einen Teil (endlich begrenzte Messung) gemacht hast, ist es der Schätzwert der Standardabweichung. [Statistiktrottel OFF] Als probates mittel gegen Lothars Einwand hat es sich bei seriösen Herstellern eingebürgert auf das nächste Inkrement der Auflösung aufzurunden. sg
Ich meine er meint dass wenn du 150um genau messen kannst, und das Rauschen ca. 176um ist, dann hast du am Positionssignal immer ein Wackelbit, der hin und her springt. Jetzt ist halt die Frage, wenn du etwas darauf regeln möchtest, wie gehst du mit dem Rauschen um? Sprich ein falsch parametrierte PID Regler könnte den Rauschen so verstärken dass das ganze Ding sich hin und her bewegt. Dazu muss man dann das Rauschen irgendwie behandeln. Sprich durch filtern, PID Regler dementsprechend konfigurieren. Oder Struktur vom Regler ändern, Kalman filter, oder oder oder.... Einfachste methode ist den Wackelbit zu filtern. Dann wird dein Auflösung schlechter, oder du musst länger messen.
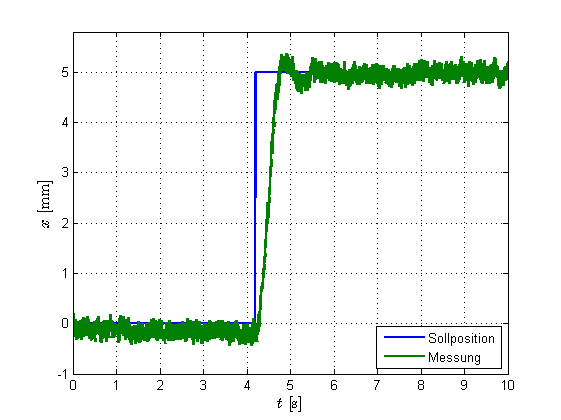
Erst mal herzlichen Dank an alle, die mir weiterhelfen können/wollen. Leider bin ich kein Sensor-Experte, sodass ich einfach noch mal näher nachfragen muss: Lothar M. schrieb: > Was würde denn dein Messystem samt Rechenweg für ein Rauschen ermittlen, > wenn der tatsächliche Abstand laufend zwischen 2999µm und 3001µm aber > demzufolge dein Messwert mangels höherer Auflösung zwischen 2850µm und > 3000µm schwanken würde? Das weis ich nicht ganz. Benjamin Wendel schrieb: > Also im Grunde folgendes: Ich habe die Messdaten genommen und davon eine > Standardabweichung gebildet. Und die Standardabweichung des Rauschens > beträgt 176µm. Ist dieser Weg, den ich gegangen bin, falsch? Also noch mal zum Verständnis: Ich sage dem Regler: Fahre mein Pos.Antrieb an die Zielposition x, z.B. eine Sprungantwort auf 5 mm. Dann messe ich die Position wie in der Abbildung und ermittele die Standardabweichung als Maß für meine Genauigkeit. Der Sensor hat laut Datenblatt eine Auflösung von 150 µm - die Standardababweichung beträgt bei mir, wenn ich es Auswerte 176 µm.
Benjamin Wendel schrieb: > War es vll. mein Fehler, dass ich den Begriff "Standardabweichung des > Rauschens" nicht verwendet habe? Das wird sicherlich einer der relevanten Kritikpunkte sein. Außerdem machst Du es Dir vermutlich zu einfach mit der pauschalen Bezeichnung als Rauschen. Kleine periodische Schwingungen um den Sollwert wären bei einer derart vereinfachten Betrachtungsweise nicht zu unterscheiden. Neben schon erwähnten Ermittlung des Schätzwertes der Standardabweichung solltest Du Dich sinnvollerweise auch mit besseren Methoden beschäftigen, z.B. in Anlehnung an die Allan-Varianz. Letztere ermöglicht es einem, zeitliche Korrelationen der gemessenen Störungen zu betrachten.
Andreas S. schrieb: > Das wird sicherlich einer der relevanten Kritikpunkte sein. Außerdem > machst Du es Dir vermutlich zu einfach mit der pauschalen Bezeichnung > als Rauschen. Kleine periodische Schwingungen um den Sollwert wären bei > einer derart vereinfachten Betrachtungsweise nicht zu unterscheiden. > > Neben schon erwähnten Ermittlung des Schätzwertes der Standardabweichung > solltest Du Dich sinnvollerweise auch mit besseren Methoden > beschäftigen, z.B. in Anlehnung an die Allan-Varianz. Letztere > ermöglicht es einem, zeitliche Korrelationen der gemessenen Störungen zu > betrachten. Ja ich bin relativ neu in diesem Themenbereich. Ich komme mehr von der Antriebstechnischen Seite. Ich möchte einfach sagen, dass die Zielposition erreicht werden kann und das Pos.Rauschen eine Standardabweichung von 176 µm besitzt, wobei der Sensor eine AUflösung von 150 µm besitzt. Sind diese Werte etwa nicht realisitisch?
Benjamin Wendel schrieb: > Also noch mal zum Verständnis: > > Ich sage dem Regler: Fahre mein Pos.Antrieb an die Zielposition x, z.B. > eine Sprungantwort auf 5 mm. > > Dann messe ich die Position Mal zum Verstämndnis: Wie und womit misst du die Position? Denn ganz generell sind Auflösung und Genauigkeit was völlig verschiedenes. Oliver
Benjamin Wendel schrieb: > ….The position noises in x- and y axes are in the order of 176 µm. Was soll die Angabe einer Größenordnung auf drei signifikante Stellen? Wie genau ist dieser Wert wirklich bestimmt? Lothar M. schrieb: > Was er dich fragt, ist in etwa sowas: wie kannst du mit einem Sensor, > der nur 150µm auflöst, ein Rauschen mit 176µm erfassen? Oder wurde das > Positionsrauschen mit einem deutlich besser auflösenden Messystem > erfasst? Rauschen ist eine statistische Größe, die aus der Streuung von Messdaten berechnet wird.
Benjamin Wendel schrieb: > Sind diese Werte etwa nicht realisitisch? Deine Messwerte interessieren nicht die Bohne, sondern ausschließlich die angewandte Methodik, um selbige zu bestimmen. Dem Gutachter ist es völlig egal, ob Deine Regelung auf 42nm, 178µm oder 5km genau arbeitet, solange Du auf wissenschaftlich nachvollziehbare Art und Weise darstellst, welche Einflüsse bestehen und wie Du diese quantifizierst.
Andreas S. schrieb: > Deine Messwerte interessieren nicht die Bohne, sondern ausschließlich > die angewandte Methodik, um selbige zu bestimmen. Dem Gutachter ist es > völlig egal, ob Deine Regelung auf 42nm, 178µm oder 5km genau arbeitet, > solange Du auf wissenschaftlich nachvollziehbare Art und Weise > darstellst, welche Einflüsse bestehen und wie Du diese quantifizierst. Also wäre es korrekt, wenn ich schreibe, dass es die Standardabweichung ist, die ich ermittelt habe? Wolfgang schrieb: > Was soll die Angabe einer Größenordnung auf drei signifikante Stellen? > Wie genau ist dieser Wert wirklich bestimmt? Naja, genau so wie ich es bestimmt habe. Habe die Standardabweichung bestimmt und rauskam dann 176 µm. So ganz klar ist es mir nicht: Was will der Gutachter oder liegt es an mir, dass ich einfach nur hätte sagen müssen, dass das Rauschen eien Standardabweichung von 176µm besitzt und damit wäre alles klar?
Benjamin Wendel schrieb: > Also wäre es korrekt, wenn ich schreibe, dass es die Standardabweichung > ist, die ich ermittelt habe? Nein, Du hast nicht die Standardabweichung ermittelt, sondern nur einen Schätzwert der Standardabweichung. Außerdem solltest Du auf wissenschaftlich korrekte Weise darstellen, warum dieser Wert ausreichend sein soll, um die Regelabweichungen zu charakterisieren. Meines Erachtens ist er nämlich nicht ausreichend. Für eine ordentliche wissenschaftliche Publikation genügt es eben nicht, irgendwelche Mist aus der Praxis hinzurotzen.
So oder so und nicht Sensorbezogen. Denke dran dass du eine Stichprobenvarianz ausrechnest: durch n-1 teilen
Sollten die Messwerte vom Sensor nicht mit 150µm gequantelt sein wenn er 150µm Auflösung hat? Sieht in der Grafik nicht so aus.
Nachtrag: bei einem ADC muss man doch immer +/- 0.5 LSB an Messunsicherheit fordern oder? Und wenn da ein gekaufter Sensor am Start ist, der digitale Daten auspuckt, dann muss man doch eigentlich diesbezüglich Angaben finden können. Was die Messgenauigkeit angeht.
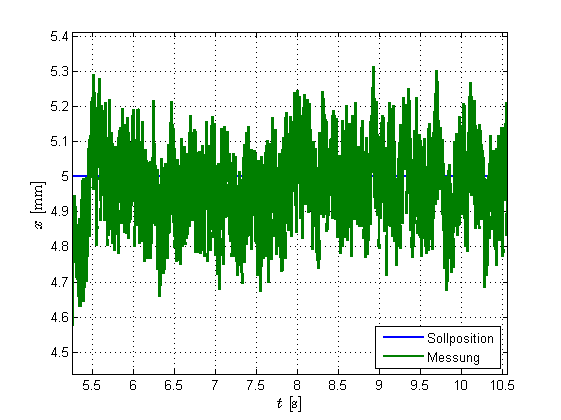
Ich habe Schwierigkeiten mit dem Englisch des Gutachters (aber mein Englisch ist noch schlechter), könnte mir jedoch vorstellen, dass es ihm um die Diskrepanz zwischen 150 µm und 175 µm geht. Mir scheint es methodisch auch nicht richtig zu sein, das Rauschen bei eingeschalteter Reglung zu erfassen. Also Reglung ausschalten und ev. Drifts abziehen erscheint mir besser. Das Signal in Deiner Grafik B2.png scheint mir auch periodische Anteile zu haben. Gruß
Benjamin Wendel schrieb: > Is the position resolution of the laser sensors is 150 µm? Die Antwort lautet nach dem Betrachten der Bilder offenbar "No!" > warum fragt er, ob die Pos. Auflösung 150 µm ist? Weil deine Grafik nicht zu einer 150µm Auflösung(!) passt. Dort müssten dann in den Daten wie schon gesagt genau diese 150µm Schritte auftauchen. Wenn das ein käuflicher Sensor ist, dann könntest du ja mal einfach dessen Namen verraten. Wolfgang schrieb: > Rauschen ist eine statistische Größe, die aus der Streuung von Messdaten > berechnet wird. Ja, eben: Müll rein --> Müll raus.
Mach zehn Messungen mit gefiltertem letzten Low Bit und speise den Gleitenden MW in deinen Regler. Schon ist Ruhe an der Front. Namaste
Lothar M. schrieb: >> warum fragt er, ob die Pos. Auflösung 150 µm ist? > Weil deine Grafik nicht zu einer 150µm Auflösung(!) passt. Dort müssten > dann in den Daten wie schon gesagt genau diese 150µm Schritte > auftauchen. > Wenn das ein käuflicher Sensor ist, dann könntest du ja mal einfach > dessen Namen verraten. Aber woran erkannt man das? Ich will es ja auch verstehen. Winfried J. schrieb: > Mach zehn Messungen mit gefiltertem letzten Low Bit und speise den > Gleitenden MW in deinen Regler. schon ist ruhe an der Front. > > Namaste Das Problem des Filters ist, dass dadurch die Dynamik einbußen erleidet.
Als Beispiel: Du hast da z.B. einen Messwert bei 4.7 mm eingetragen. Da kommt man nicht ganzzahlig mit 150 um Schritten hin.
Benjamin Wendel schrieb: > Lothar M. schrieb: >>> warum fragt er, ob die Pos. Auflösung 150 µm ist? >> Weil deine Grafik nicht zu einer 150µm Auflösung(!) passt. Dort müssten >> dann in den Daten wie schon gesagt genau diese 150µm Schritte >> auftauchen. >> Wenn das ein käuflicher Sensor ist, dann könntest du ja mal einfach >> dessen Namen verraten. > > Aber woran erkannt man das? Ich will es ja auch verstehen. > > Winfried J. schrieb: >> Mach zehn Messungen mit gefiltertem letzten Low Bit und speise den >> Gleitenden MW in deinen Regler. schon ist ruhe an der Front. >> >> Namaste > > Das Problem des Filters ist, dass dadurch die Dynamik einbußen erleidet. Ich wette ohne das Projekt zu kennen, die Messung läuft um den Faktor tausend schneller als der Steller nachkommt. Also eher ein theoretisches Problem. Namaste
Wenn Du Student bist, was sagt Dein Betreuer dazu?
Wenn ich das lese: Benjamin Wendel schrieb: > Leider bin ich kein Sensor-Experte, sodass ich einfach noch mal näher > nachfragen muss und dann das: Benjamin Wendel schrieb: > Ich habe als Student glücklicherweise die Möglichkeit bekommen, einen > Vortrag an einer Konferenz zu halten. dann frage ich mich, was das für eine Konferenz ist? Wer braucht solche Konferenzen, wo Leute vortragen, die die basics nicht kennen? Junge, du hast ein klares Abtastproblem!
Analogmann schrieb: > Wer braucht solche Konferenzen, wo Leute vortragen, die die basics nicht > kennen? Du hast die Sache nicht verstanden: Der Gutachter, der den eingereichten Konferenzbeitrag geprüft hat, hat doch offenbar der TE wegen seiner unzureichenden Kenntnisse (vorläufig) ausgeschlossen. > Junge, du hast ein klares Abtastproblem! Nein, DU hast ein Verständnisproblem. Das ist schlimmer als die Unerfahrenheit des TE.
Trotzdem werden dort Unerfahre eingeladen und es bleibt das Problem dass er nicht versteht, wo sein Denkfehler ist. Man sieht also, dass du hier das Leseproblem hast :-)
Nun. Eine Moeglichkeit. Man ermittelt die Genauigkeit der Positionsinformation indem man die Position festhaelt, zB Anschrauben, und ein Histogramm der Messwerte aufnimmt. Dann verschiebt man zB mit einer Piezostufe im nm Bereich und nimmt wieder das Histogramm auf. Alle Histogramme aufeinander gelegt ergibt nun die Sensorgenauigkeit. Die kann irgendeine Zahl sein, mit beliebig vielen Stellen. und eine Standardabweichung dazu. Was mich etwas erstaunt, dass die Regelung fast auf ein Bit (eine Sensorstufe) genau erfolgt. Aber ja, doch, das Resultat ist moeglich.
Zitronen F. schrieb: > Nun. Eine Moeglichkeit. Man ermittelt die Genauigkeit der > Positionsinformation indem man die Position festhaelt, zB Anschrauben, > und ein Histogramm der Messwerte aufnimmt. Dann verschiebt man zB mit > einer Piezostufe im nm Bereich und nimmt wieder das Histogramm auf. Alle > Histogramme aufeinander gelegt ergibt nun die Sensorgenauigkeit. Die > kann irgendeine Zahl sein, mit beliebig vielen Stellen. und eine > Standardabweichung dazu. Was mich etwas erstaunt, dass die Regelung fast > auf ein Bit (eine Sensorstufe) genau erfolgt. Aber ja, doch, das > Resultat ist moeglich. Ja Genauigkeit und Auflösung können in der selben Größenklasse vorliegen. Das führt dann aber wie in diesem Fall gern zu erhöhtem Rauschen wodurch dummerweise das letzt Bit nutzlos wird. Namaste
Naja, ist doch gut wenn du auf das letzte Bit ausregeln kannst. Allenfalls ist die Abweichung an der Bitgrenze geringer, dann darf man die Sensorgenauigkeit aber nicht so messen wie ich's gemacht habe, sondern muss im geschlossenen Regelfall betrachten. Dann wird im optimlen Fall die Position auf eine Bitaenderung geregelt, und man muesste die Position anders ausmessen.
Benjamin Wendel schrieb: > Ich habe als Student glücklicherweise die Möglichkeit bekommen, einen > Vortrag an einer Konferenz zu halten. Dazu habe ich einen Artikel > verfasst und dazu wurde eine Rückfrage von einem Gutachter gestellt: Ich verstehe das so, daß Du ein Paper in einer wissenschaftlichen Zeitschrift mit Peer-Review eingereicht hast und jetzt die Rückmeldung von einem Reviewer bekommen hast. Das ist immer wieder lustig. Keine Ahnung wie die Typen ausgewählt werden, vermutlich nimmt man immer den fachfremdesten unter den Leuten, damit keine Verbrüderung stattfindet. Mein Rat wäre: Diesen Input (egal wie schwachsinnig) irgendwie einzuarbeiten und dann kannst Du auf eine Veröffentlichung hoffen. Mach Dir weniger Gedanken über den Sinn dahinter, die "Gutachter" kommen immer auf ganz komische Ideen.
@TE: Klemm mal den Regler ab und fixiere die Position. Das misst du dann. Nur so kannst du das Messsystemrauschen bestimmen. Bei deinen Angaben 150mue/174mue duerfte tatsaechlich nur ein Bit wackeln, also 150mue hin und her.
kyrk.5 schrieb: > Ich meine er meint dass wenn du 150um genau messen kannst, Es war von 150 µm Auflösung die Rede. Genau ist was anderes. Mach dich mal schlau über den Unterschied zwischen Genauigkeit und Auflösung Benjamin Wendel schrieb: > Auflösung 150 µm
Maier schrieb: > Nur so kannst du das Messsystemrauschen bestimmen. Bei deinen > Angaben 150mue/174mue duerfte tatsaechlich nur ein Bit wackeln, also > 150mue hin und her. Wer sagt denn, dass es bei normalverteilten Werten keine Einzelwerte gibt, die mehr als die einfache Standardabweichung vom Mittelwert entfernt liegen. Damit würde man mehr als 30% der Werte ignorieren.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.