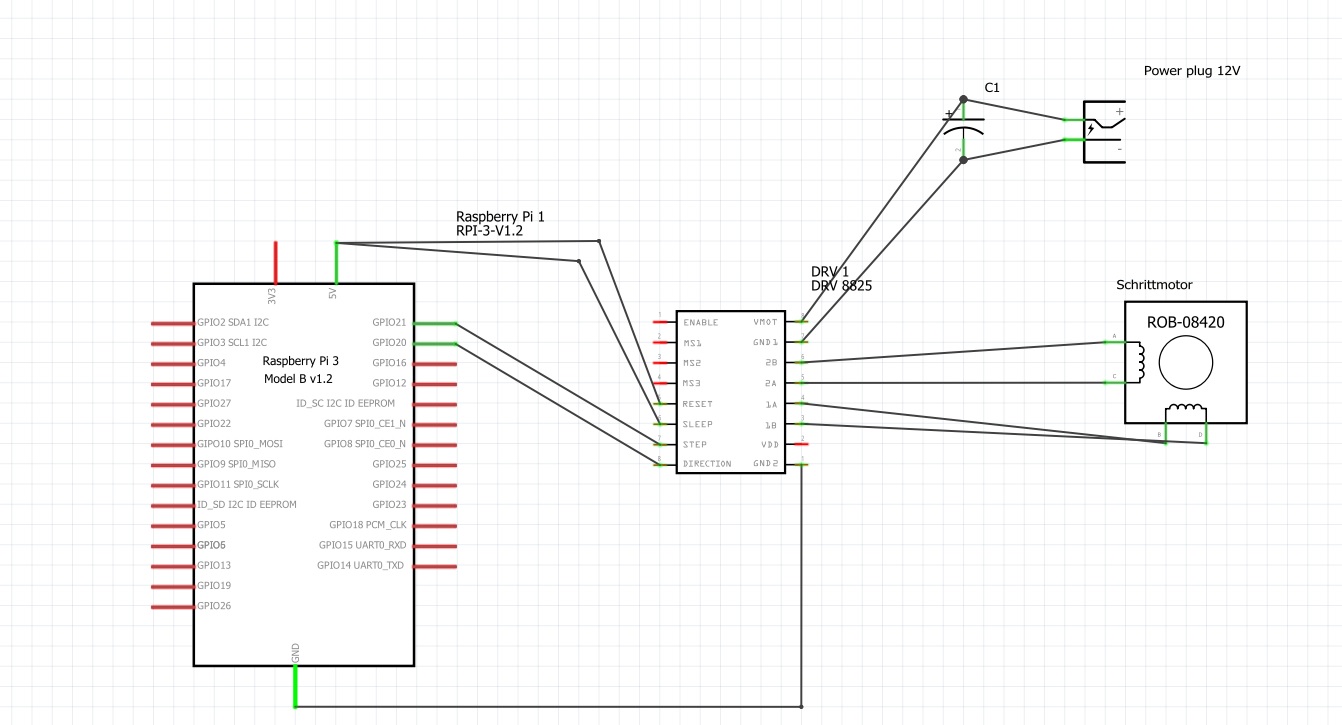
Schönen Guten Abend, Ich sitze zur Zeit an einem Projekt bei dem ich mit einem Schrittmotor über eine Kugelumlaufspindel einen Schlitten bewegen möchte. Die Ansteuerung über den Raspberry Pi mit kleinem User Interface und zwei Endschaltern funktioniert komplett. Nun stehe ich aber noch vor einem hoffentlich kleinen Problem: Sobald ich den Schrittmotor oder irgendein leitendes Teil des Linearsystems mit Metall berühre, macht der Schrittmotor unkontrolliert Schritte vor und zurück.Leitende Teile sind hier die Kugelumlaufspindel, die Führungsrollen, Schrauben und nicht lackierte Teile. Wenn ich Linearführung mit dem Finger berühre und mit etwas metallischen die Spindel berühre macht der Motor keine Schritte. Dies funktioniert auch wenn ich lackierte Teile oder den Aluschlitten anfasse. Bisher habe ich folgendes versucht: 1.Ein Kabel an eine leitende Stelle des Motors geschraubt und das andere Ende an die Erdung der Steckdose(ganz vorsichtig an einem vorher nicht eingesteckten Verlängerungskabel ;)) 2. Masse von 5V und 12V verbunden 3. Das Kabel wie bei 1. um das Rohr eines Heizkörpers gewickelt. Bedanke mich schon mal für jeglichen Denkanstoß, Schlagwörter oder im besten Fall sogar Lösungen! PS: Hier der Link des Linearsytems https://www.banggood.com/100mm-Long-Stage-Actuator-Linear-Stage-1204-Ball-Screw-Linear-Slide-Stroke-With-42mm-Stepper-Motor-p-1142419.html?rmmds=myorder&cur_warehouse=CN
Angehängte Dateien:
-

Schrittmotor.jpg
180 KB
Bist du dir sicher das die fünf Pins an deine DRV-Bord offen bleiben dürfen und nicht eventuell nach GND sollten?
Patrick T. schrieb: > Bedanke mich schon mal für jeglichen Denkanstoß Bei meinem blauen TB6560 Board musste Masse an die Treiber-ICs auf der Platine besser verdrahtet werden.
Patrick T. schrieb: > Die > Ansteuerung über den Raspberry Pi mit kleinem User Interface und zwei > Endschaltern funktioniert komplett. Anscheinend nicht, wenn sie nicht störungsrobust ist. > Bisher habe ich folgendes versucht: > 1.Ein Kabel an eine leitende Stelle des Motors geschraubt und das andere > Ende an die Erdung der Steckdose(ganz vorsichtig an einem vorher nicht > eingesteckten Verlängerungskabel ;)) Das ist ja süß ;) Und was bringt das, wenn das Verlängerungskabel nicht eingesteckt ist? Außerdem warum überhaupt Verlängerungskabel? Der Weg zum PE (Erdung) sollte so kurz und niederohmig wie möglich sein. Bevor ich dir aber hier iregndwelche Tips gebe, mach mal Bilder vom Aufbau. Der Schaltplan sagt z.b. nichts darüber aus, wie der Raspi versorgt wird > 2. Masse von 5V und 12V verbunden Ok. Welches 5V und welches 12V? Die GNDs von der Schrittmotorversorgung und vom Raspi sollten sowieso niederohmig miteinander verbunden sein. Wie du das gemacht hast, spielt eine Rolle, nicht nur das du es gemacht hast. > 3. Das Kabel wie bei 1. um das Rohr eines Heizkörpers gewickelt. Lass das. Warum willst du eine Spule aus dem armen Heizkörper bauen? Warum verwendest du überhaupt an Sleep und Reset 5V und nicht 3,3V. Die Logikpegel vom Raspi sind 3,3V und nicht 5V. Also übernehme das beim DRV8825. Enable direkt mit GND verbinden. Mit MS1, MS2, MS3 stellst du das Mikrostepping ein. Bei dir ist das offen. Why? Willst du wirklich Fullstep-Mode? C1 ist eingezeichnet aber ohne Wert. Wie groß ist C1?
Patrick T. schrieb: > Sobald ich den Schrittmotor oder irgendein leitendes Teil des > Linearsystems mit Metall berühre, macht der Schrittmotor unkontrolliert > Schritte vor und zurück.Leitende Teile sind hier die Kugelumlaufspindel, > die Führungsrollen, Schrauben und nicht lackierte Teile. Dann solltest du die Teile mal erden bzw. mit Masse verbinden. Ausserdem sollten Leitungen, auf denen höherer Strom fliesst, auch stärker ausgelegt werden. U.a. also die Versorgung des Treibers, die Leitungen zum Schrittmotor sowie alle Masseleitungen.
>Anscheinend nicht, wenn sie nicht störungsrobust ist.
Damit meine ich nur die Software die macht was sie soll, also ohne
Schrittverlust von a nach b fahren.
Das Verlängerunskabel ist natürlich eingesteckt ;) daran hängt ein
MicroUSB Netzteil bis 2,5A für den Raspberry und ein Schaltnetzteil auf
12V einstellt.
Habe mir die 12V vom Netzteil und die 5V vom Rapsberry(Pin) auf ein
Breadboard gelegt und von da aus den DRV versorgt. Zwischen Masse 12v
und 5v auf dem Breadboard habe ich ein Jumperkabel. C1 sind 47mF.
Ich hatte den DRV am Anfang an 3,3V angeschlossen bis ich gelesen habe
das auch 5V in Verbindung mit dem Pi ok sind. Die 3,3V Pins(nicht GPIO)
können ja anscheinend nicht viel Strom liefern.. Dachte mir ich schone
den Pi damti.
Bis jetzt hat es mit 5V auch gut funktioniert. Habe Enable mal mit an
Ground angeschlossen, leider kein Unterschied.
Ja momentan noch Fullstep. Für Microstepping muss ich ja nur die
jeweiligen Pins auf High setzen. Das entscheide ich wenn das hier gelöst
ist :)
Patrick T. schrieb: >>Anscheinend nicht, wenn sie nicht störungsrobust ist. > Damit meine ich nur die Software die macht was sie soll, also ohne > Schrittverlust von a nach b fahren. Schrittverluste kommen wahrscheinlicher durch die Elektrik und weniger durch die Software, da ich annehme, du übernimmst die Software irgendwoher aus bekannten Quellen. Bei Software kopieren kann man weniger falsch machen. > Das Verlängerunskabel ist natürlich eingesteckt ;) daran hängt ein > MicroUSB Netzteil bis 2,5A für den Raspberry und ein Schaltnetzteil auf > 12V einstellt. Was für ein Schaltnetzteil? Galvanische Trennung zwischen den Ausgängen und PE? > Habe mir die 12V vom Netzteil und die 5V vom Rapsberry(Pin) auf ein > Breadboard gelegt und von da aus den DRV versorgt. Zwischen Masse 12v > und 5v auf dem Breadboard habe ich ein Jumperkabel. C1 sind 47mF. Jumperkabel sind immer scheiße bei sowas. Versuch die Kabel so kurz wie möglich zu halten. Ich hab aber geschaut: VMot GND und Logik-GND sind auf dem Pololu-Carrier miteinander verbunden. Frage: 47mF? Du meinst 47µF? Wie weit weg von den Eingängen V_Mot und GND vom Pololu-Carrier ist der Kondensator? > Ich hatte den DRV am Anfang an 3,3V angeschlossen bis ich gelesen habe > das auch 5V in Verbindung mit dem Pi ok sind. Die 3,3V Pins(nicht GPIO) > können ja anscheinend nicht viel Strom liefern.. Dachte mir ich schone > den Pi damit. Der DRV8825 hat eine interne Spannungsreferenz. Der braucht gar keine Versorgung. Sleep und Reset ziehen keinen großen Strom, da es nur Eingänge sind. Im Moment kann ich dir nicht sagen, warum dein Motor zuckt, wenn du die Linearführung berührst. Kann ja nur eine elektrostatische Entladung sein. Mit der Erdung der Linearführung sollte das aber eigentlich über deine Verbindung mit der Erde (PE-Kontakt) abfließen. Worauf du sonst noch achten solltest: 1) Verbindung (STEP/DIR) zwischen Pi und DRV8825 so kurz wie möglich zu halten, damit dir da nichts auf die Leitung einstrahlt. 2) GND von Pi, DRV und den Netzteilen nur an einer Stelle vornehmen (Star-GND)
> Schrittverluste kommen wahrscheinlicher durch die Elektrik Bei meinem letzten Projekt habe ich die RPi.GPIO Bibliothek genutzt und mit time.sleep die den Step Pin geschaltet. Ab einer gewissen Drehzahl gab es da Schrittverlust. Nutze jetzt Pigpio und generiere damit eine PWM. Diesmal habe ich alles selbst geschrieben, aber ich weiß was du meinst. > Was für ein Schaltnetzteil? https://www.amazon.de/gp/product/B002RVEEQQ/ref=ppx_yo_dt_b_search_asin_title?ie=UTF8&psc=1 Das mit dem Schaltnetzteil nehme ich zurück. Laut Definition ist dieses schonmal keins.. > Frage: 47mF? Du meinst 47µF? Ja ich meine 47 Microfarad nicht Milli. Habe den Kondensator auf dem Breadboard direkt neben dem DRV stecken, also 2,54mm?! Du hast mich auf eine gute Idee gebracht: Habe mal die Kabel von Step und Dir entfernt und nur Ground, Reset und Sleep angeschlossen. Das reicht schon das der Motor die Position hält, also "an" ist. Jetzt macht der Motor keine Schritte mehr egal wo ich die Spindel mit etwas metallischem berühre. > damit dir da nichts auf die Leitung einstrahlt Das scheint es auch zu sein. Gibt es da noch schlaue Tricks die dem ganzen entgegen wirken, falls das mit so kurz wie möglichen Kabeln noch nicht reicht? Kann es leider erst morgen testen. Auf jeden Fall schon mal Danke für das Feedback!
Patrick T. schrieb: >> Was für ein Schaltnetzteil? > https://www.amazon.de/gp/product/B002RVEEQQ/ref=ppx_yo_dt_b_search_asin_title?ie=UTF8&psc=1 > Das mit dem Schaltnetzteil nehme ich zurück. Laut Definition ist dieses > schonmal keins.. Sieht aber nach einem aus. Ist ja kein Gebrauchtes und damit ist es zu 99% ein Schaltnetzteil. An dem Eurostecker sieht man aber schon mal, dass keine Verbindung zu PE hat. > Ja ich meine 47 Microfarad nicht Milli. > Habe den Kondensator auf dem Breadboard direkt neben dem DRV stecken, > also 2,54mm?! Nicht gut. 47 Microfarad mit wahrscheinlich massiven parasitären Serienwiderstand. Nimm 100µF. Merke bei Kondensatoren: Zu viel kann auch scheiße sein. > Das scheint es auch zu sein. > Gibt es da noch schlaue Tricks die dem ganzen entgegen wirken, falls das > mit so kurz wie möglichen Kabeln noch nicht reicht? Kann es leider erst > morgen testen. Leitungen zwischen Raspi und DRV8825 so kurz wie möglich halten. Dann schauen wir mal weiter.
Patrick T. schrieb: > Habe mal die Kabel von Step und Dir entfernt und nur Ground, Reset und > Sleep angeschlossen. Das reicht schon das der Motor die Position hält, > also "an" ist. Jetzt macht der Motor keine Schritte mehr egal wo ich die > Spindel mit etwas metallischem berühre. Mal blöd gefragt, du benutzt die beiden Ausgänge an RPi schon als push/pull und macht hier nicht irgendwelche oc Spielchenb bei denen die Eingänge dann ohne pullup/-down Widerstände eventuell in der Luft hängen?
Hallo Timo, Timo N. schrieb: > Patrick T. schrieb: >> Ja ich meine 47 Microfarad nicht Milli. >> Habe den Kondensator auf dem Breadboard direkt neben dem DRV stecken, >> also 2,54mm?! > > Nicht gut. 47 Microfarad mit wahrscheinlich massiven parasitären > Serienwiderstand. Nimm 100µF. Merke bei Kondensatoren: Zu viel kann auch > scheiße sein. Bevor du hier mit pseudoklugen Ratschlägen um dich wirfst solltest du erstmal ein wenig Nachdenken. 47 Microfarad = 47µF < 100µF. Abgesehen davon ist der Serienwiderstand ist nur von untergeordneter Bedeutung. Wenn der Treiber vernünftig designt ist, sind ohnehin mindestens 1*100nF parallel zur Versorgung geschaltet. Bei den Polulu-Boards würde ich da aber nicht drauf wetten. Mit freundlichen Grüßen Thorsten Ostermann
Hallo Timo, Timo N. schrieb: > Patrick T. schrieb: >>>Anscheinend nicht, wenn sie nicht störungsrobust ist. >> Damit meine ich nur die Software die macht was sie soll, also ohne >> Schrittverlust von a nach b fahren. > Schrittverluste kommen wahrscheinlicher durch die Elektrik und weniger > durch die Software, da ich annehme, du übernimmst die Software > irgendwoher aus bekannten Quellen. Bei Software kopieren kann man > weniger falsch machen. Wir reden hier nicht von "Schrittverlusten", damit meint man normalerweise Positionsfehler durch Überlastung/Ausrasten des Motors. Hier geht es um ein EMV-Problem. Das sind im Zweifelsfall eher zuviele Schritte, nicht zu wenig. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten O. schrieb: > Bevor du hier mit pseudoklugen Ratschlägen um dich wirfst solltest du > erstmal ein wenig Nachdenken. 47 Microfarad = 47µF < 100µF. Abgesehen > davon ist der Serienwiderstand ist nur von Hi, also ich konnte aus dem Kontext schließen, dass hier ein Tippfehler vorliegt. Das kann man auch höflich und sachlich korrigieren und nicht gleich mit der großen Keule hauen. Oder hast du das ernsthaft nicht erkannt? Vielleicht sollte man eine Funktion hier im Forum einführen, dass Beiträge, nachdem sie getippt wurden, erst mal dem Autor 5 Minuten lang gezeigt werden. Dann ist das erste Adrenalin wieder weg und 50% der geplanten Beiträge würden dann vermutlich wieder gelöscht werden und uns hier nicht auf den Wecker gehen. Servo
Da gab es keinen Tippfehler. Patrik hatte ja bereits klargestellt, was er meint. Trotzdem musste Timo oberschlau daherher reden. Seine anderen Beiträge zum Thema sind ja von ähnlicher Qualität: "Im Moment kann ich dir nicht sagen, warum dein Motor zuckt,..." ...rate aber mal fleißig mit. ;) Und danke für den Hinweis, aber ich denke in der Regel nach, bevor ich etwas poste. Insbesondere wenn ich jemandem Hilfestellung bei einem Problem gebe. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten O. schrieb: > Bevor du hier mit pseudoklugen Ratschlägen um dich wirfst solltest du > erstmal ein wenig Nachdenken. Ich hab mich da verlesen bzw an dem TO vorbeigeschrieben. Ich dachte er meinte er hat 47 Millifarad. Das kommt daher dass ich an "µF" gedacht habe und er "Micro" geschrieben hat und ich dann bei "Micro" an "Milli" dachte. Schwer verständlich, aber ich hab hab mich zu später Stunde einfach vertan. Es macht natürlich gar keinen Sinn, dass ein 47µF Kondensator auf jeden Fall einen höheren ESR haben sollte als ein 100µF. Muss das gleich als "pseudoklug" bezeichnet werden? Wenn du den Pololu-Dingern keinen 100nF Kerko an der Versorgung zutraust, dann braucht er eben einen Kondensator mit niedrigem ESR an der Versorgung. Dann habe ich doch mit dem was ich eigentlich ausdrücken wollte Recht. "Merke bei Kondensatoren: Zu viel kann auch scheiße sein." Jedoch: 100nF reichen meiner Meinung nach als Energiequelle mit niedriger Impedanz nicht aus. Deswegen braucht man eben noch den 100µF/47µF Elko neben dem Treiber, der schnell entsprechend der Stromregelung vom Treiber den nötigen Strom in ausreichender Menge nachliefern kann. Thorsten O. schrieb: > Wir reden hier nicht von "Schrittverlusten", damit meint man > normalerweise Positionsfehler durch Überlastung/Ausrasten des Motors. > Hier geht es um ein EMV-Problem. Das sind im Zweifelsfall eher zuviele > Schritte, nicht zu wenig. Das meinte ich auch salopp mit "Elektrik" (also z.b. Überlastung des Schrittmotors aufgrund von Gegenmoment). Der TO, nicht ich, sprach anfangs von "Software ohne Schrittverluste". Mir ist nicht bekannt, dass Ansteuerungsprobleme , die aus der Software resultieren, als Schrittverluste bezeichnet werden. Das wollte ich eigentlich damit ausdrücken. Insofern denke ich, dass wir hier die gleiche Definition von Schrittverlusten haben. Eventuell achte ich das nächste mal darauf mich da verständlicher auszudrücken. Das habe ich bei meiner Antwort oben leider nicht gemacht. Die ganze EMV-Thematik habe ich nicht mit Schrittverlusten in Verbindung bringen wollen. Thorsten O. schrieb: > Das sind im Zweifelsfall eher zuviele > Schritte, nicht zu wenig. Mit der Aussage wäre ich dann aber auch vorsichtig. Wie sich EMV gerade bei einer galvanisch komplett entkoppelten Schaltung äußert ist sicher nicht sicher. Es kann auch ein STEP einfach "ausgebügelt" und nicht erkannt werden werden.
Timo N. schrieb: > Es macht natürlich gar keinen Sinn, dass ein 47µF Kondensator auf jeden > Fall einen höheren ESR haben sollte als ein 100µF. ESR ist an dieser Stelle auch völlig unerheblich. Der Elko dient als Reservoir und soll die Spitzenströme des Steppertreiber liefern. Das ist insbesondere dann wichtig, wenn die Speisung entfernt vom Treiber ist und über unzureichend dimensionierte (zu dünne) Leitungen passiert. Der Elko sollte nahe am Treiber sein. Hier sind übrigens auch 470µF oder 1000µF kein Fehler, vorausgesetzt, das Netzteil kommt mit kapazitiven Lasten klar. Bei Schaltnetzteilen legt man besser die Leitungen stark aus und verlässt sich auf die schnelle Regelung des NT.
Zappelt der Schrittmotor auch wenn man den unbeschalteten Enable-Eingang berührt? Normalerweise sollte dieser Eingang vom Rasperry gesteuert werden. Floatende Eingänge sind Antennen und niemals gut.
Matthias S. schrieb: > Timo N. schrieb: >> Es macht natürlich gar keinen Sinn, dass ein 47µF Kondensator auf jeden >> Fall einen höheren ESR haben sollte als ein 100µF. > > ESR ist an dieser Stelle auch völlig unerheblich. Der Elko dient als > Reservoir und soll die Spitzenströme des Steppertreiber liefern. Das kann der Elko eben mit niedrigem ESR/ESL besser als mit hohem ESR. Natürlich ist es für den Gesamtwiderstand (ESR + Leitungswiderstand bis zum Treiber) auch besser, wenn der Elko näher beim Treiber sitzt. Würde da jetzt nicht von "unerheblich" sprechen.
Hallo Timo, Timo N. schrieb: > Thorsten O. schrieb: >> Bevor du hier mit pseudoklugen Ratschlägen um dich wirfst solltest du >> erstmal ein wenig Nachdenken. > > Ich hab mich da verlesen bzw an dem TO vorbeigeschrieben. Ich dachte er > meinte er hat 47 Millifarad. Das kommt daher dass ich an "µF" gedacht > habe und er "Micro" geschrieben hat und ich dann bei "Micro" an "Milli" > dachte. > Schwer verständlich, aber ich hab hab mich zu später Stunde einfach > vertan. > Es macht natürlich gar keinen Sinn, dass ein 47µF Kondensator auf jeden > Fall einen höheren ESR haben sollte als ein 100µF. > > Muss das gleich als "pseudoklug" bezeichnet werden? Ok, geschenkt. ;) > Wenn du den Pololu-Dingern keinen 100nF Kerko an der Versorgung > zutraust, dann braucht er eben einen Kondensator mit niedrigem ESR an > der Versorgung. Dann habe ich doch mit dem was ich eigentlich ausdrücken > wollte Recht. > "Merke bei Kondensatoren: Zu viel kann auch scheiße sein." > Jedoch: 100nF reichen meiner Meinung nach als Energiequelle mit > niedriger Impedanz nicht aus. Deswegen braucht man eben noch den > 100µF/47µF Elko neben dem Treiber, der schnell entsprechend der > Stromregelung vom Treiber den nötigen Strom in ausreichender Menge > nachliefern kann. Das 100nF für eine H-Brücke alleine nicht ausreichen, da sind wir uns absolut einig. Zu kleine oder komplett fehlende Elkos bemängele ich bei den diversen Motorshields immer wieder. Spannend (im wahrsten Sinne des Wortes) wird dass dann, wenn man hohe Verzögerungen mit großen Massen realiseren will. Dann geben die Dinger aufgrund der kurzzeitig stark ansteigenden Versorgungspannung nämlich sehr schnell Rauchzeichen von sich. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten O. schrieb: > Ok, geschenkt. ;) ;) > Das 100nF für eine H-Brücke alleine nicht ausreichen, da sind wir uns > absolut einig. Zu kleine oder komplett fehlende Elkos bemängele ich bei > den diversen Motorshields immer wieder. Spannend (im wahrsten Sinne des > Wortes) wird dass dann, wenn man hohe Verzögerungen mit großen Massen > realiseren will. Dann geben die Dinger aufgrund der kurzzeitig stark > ansteigenden Versorgungspannung nämlich sehr schnell Rauchzeichen von > sich. Ich hatte von den Dingern leider noch keine Originalen in den Händen, sondern nur die China-Klone. Kann es sein, dass deine Erfahrungsberichte von Personen aus dem Hobby-Bereich stammen die eventuell auch nur die Klone verwendet haben? Das würde mich interessieren. Von der Qualität der gefälschten Treiber auf die Qualität der Original-Treiber zu schließen wäre natürlich nicht fair. Aufgrund des sehr geringen Preises für die fertig gelöteten DRV8825-Treiberplatinen (<1$ inkl Versand bei AliExpress) ging ich davon aus, dass diese eventuell mit gefälschten Treiber-ICs (also nicht mit originalen ICs von TI) bestückt wurden, da der Stückpreis der original ICs (Abnahme 1000 Stück @ Mouser) schon allein weit jenseits von 1$ liegt (ich meine so bei 2.50$+). Auch habe ich festgestellt, dass der eingestellte Phasenstrom über den Poti überhaupt nicht dem entspricht, den man in den Leitungen messen kann (selbst wenn man beachtet, dass der Strom in den Motorleitungen der RMS-Strom ist und der eingestellte am Poti der maximale Phasenstrom). Das könnte aber auch an falschen Shuntwiderständen (zu geringe Leistung) liegen, die auf den China-Modulen verbaut werden. Ich kam dabei meist nicht über 1,0 A_rms (1,4 A_peak) hinaus, obwohl 2,2 A_preak möglich sein sollten.
GEKU schrieb: > Zappelt der Schrittmotor auch wenn man den unbeschalteten Enable-Eingang > berührt? Jap auch dann zappelt er. Wenn ich den Enable Pin mit Ground verbinde,was ja eigentlich nicht nötig ist, auch. Wenn ich den Pin auf HIGH setze ist das Board "deaktiviert". Der Motor fängt auch schon an zu drehen wenn ich die Fingerspitze auf den STEP Pin lege und auch wenn ich nur den Direction Pin berühre. Habe mal alle Jumperkabel entfernt und alles neu aufgebaut. Als Kabel nutze ich jetzt Litzen aus einem Cat7 Kabel, aber ohne die Schirmung etc. Das Kabel vom GPIO zu dem STEP Pin ist ca 20mm lang. Alle anderen Kabel habe ich auch so kurz wie möglich gehalten. Leider immernoch das selbe Problem.. Bei eurer Diskussion über den Kondensator kann ich leider Null mitreden. Habe mich an den Richtwert von Pololu gehalten. Timo N. schrieb: > Von der Qualität der gefälschten Treiber auf die Qualität der > Original-Treiber zu schließen wäre natürlich nicht fair. Bei meinen handelt es sich anscheinend um einen Nachbau. Auf jeden Fall habe ich nicht das TI Logo auf dem Chip stehen. Ich bestelle mir mal einen Originalen von Pololu, hoffe mal die Chinesen fälschen nicht auch den TI Aufdruck :D Irgendwer schrieb: > Mal blöd gefragt, du benutzt die beiden Ausgänge an RPi schon als > push/pull und macht hier nicht irgendwelche oc Spielchenb bei denen die > Eingänge dann ohne pullup/-down Widerstände eventuell in der Luft > hängen? Wie meinst du das genau? Meinst du die pull up/down widerstände vom Raspi? Wenn ja die kann ich nur bei Eingängen schalten nicht aber bei Ausgängen. Der Eingang wäre hier der DRV8825. Eventuell sehr blöde Frage: Gibt es eine Möglichkeit oder macht das überhaupt Sinn wenn ich etwas zwischen GPIO und STEP Pin schalte was erst ab einer gewissen Spannung Strom fließen lässt? Dachte da erstmal an einen einfachen Widerstand. Laut diversen Rapsberry Foren Einträgen aber keine gute Lösung zwischen GPIO und Signaleingang.
Patrick T. schrieb: > Jap auch dann zappelt er. Wenn ich den Enable Pin mit Ground > verbinde,was ja eigentlich nicht nötig ist, auch. Wenn ich den Pin auf > HIGH setze ist das Board "deaktiviert". Warum soll das "nicht nötig" sein. Nur weil es in bestimmten Betriebsmodi zufällig funktioniert, heißt nicht, dass es unbeschaltet bleiben soll. Enable gehört an GND, damit der Treiber sicher AN bliebt. D > Der Motor fängt auch schon an zu drehen wenn ich die Fingerspitze auf > den STEP Pin lege und auch wenn ich nur den Direction Pin berühre. > Habe mal alle Jumperkabel entfernt und alles neu aufgebaut. Als Kabel > nutze ich jetzt Litzen aus einem Cat7 Kabel, aber ohne die Schirmung > etc. > Das Kabel vom GPIO zu dem STEP Pin ist ca 20mm lang. Alle anderen Kabel > habe ich auch so kurz wie möglich gehalten. Leider immernoch das selbe > Problem.. Hört sich dann eher nach galvanischer Kopplung (EMV) an, weil du durch Berührung deine in deinem Körper gesammelte elektrostatische Ladung auf die Schaltung bringst. Irgendwo muss das dann aus der Schaltung nach Erde abfließen, erzeugt aber an dem STEP-Eingang einen ausreichen hohen Spannungspuls um einen Schritt zu erkennen. > Bei eurer Diskussion über den Kondensator kann ich leider Null mitreden. > Habe mich an den Richtwert von Pololu gehalten. Hier wird im Diagramm aber 100µF empfohlen. Spielt aber für dein Problem keine Rolle: https://www.pololu.com/product/2133 > Bei meinen handelt es sich anscheinend um einen Nachbau. Auf jeden Fall > habe ich nicht das TI Logo auf dem Chip stehen. Ich bestelle mir mal > einen Originalen von Pololu, hoffe mal die Chinesen fälschen nicht auch > den TI Aufdruck :D Hatte außer den beschrieben Problemen für meine Anwedung keine Probleme mit den Gefälschten. Kommt aber auf die Anwendung an. Hier gibts Orignale aus Deutschland (offizielle Distributoren): https://eckstein-shop.de/Pololu-DRV8825-Stepper-Motortreiber-Carrier-High-Current https://www.exp-tech.de/module/motorsteuerung/schrittmotoren/4802/drv8825-stepper-motor-driver-carrier-high-current > Wie meinst du das genau? Meinst du die pull up/down widerstände vom > Raspi? Wenn ja die kann ich nur bei Eingängen schalten nicht aber bei > Ausgängen. > Der Eingang wäre hier der DRV8825. Er meint die Ausgangsbeschaltung des SoCs des RaspberryPi. Nicht Pullup/Pulldown (es geht nicht um Widerstände), sondern um Push-Pull-Ausgangstreiberstufen und Open Collector-Ausgänge ("oc") https://www.mikrocontroller.net/articles/Ausgangsstufen_Logik-ICs Keine Ahnung was der RaspberryPi bietet, weil es leider keine vollständigen Datenblätter zu dem verbauten Broadcom-Chip auf dem RPi gibt. Hier steht auch noch was speziell für den Pi: https://www.iot-programmer.com/index.php/books/22-raspberry-pi-and-the-iot-in-c/chapters-raspberry-pi-and-the-iot-in-c/35-raspberry-pi-iot-in-c-introduction-to-the-gpio?start=2 Hier wird von Push-Pull-Ausgang gesprochen. Die internen Pullup und Pulldown-Widerstände können intern zugeschaltet werden. Da der STEP-Eingang des DRV8825 intern einen Pulldown hat, ist der Push-Pull-Modus schon richtig. Der DRV8825 macht ja einen Schritt, wenn am STEP-Eingang eine steifende Flanke erkannt wird. Ob jetzt noch ein externer Pulldown an der STEP-Leitungen was bringt... Ich glaub es fast nicht. Probieren kann man es. Ich glaube in deiner Umgebung ist eher EMV-technisch was ganz krumm. > Eventuell sehr blöde Frage: > Gibt es eine Möglichkeit oder macht das überhaupt Sinn wenn ich etwas > zwischen GPIO und STEP Pin schalte was erst ab einer gewissen Spannung > Strom fließen lässt? Dachte da erstmal an einen einfachen Widerstand. > Laut diversen Rapsberry Foren Einträgen aber keine gute Lösung zwischen > GPIO und > Signaleingang. Nein. Die Spannung, die über dein Berühren des Aufbaus abfällt, ist vermutlich viel größer, als die 3,3V mit der der Pi den STEP-Eingang des DRV8825 schaltet. Wenn du den Schutzkontakt (PE) an der Steckdose anfässt(und festhältst) und dann mit der anderen Hand die Schaltung berührst, dürfte eigentlich nichts passieren. Ist das so? Achtung: Ich gehe davon aus, du weißt was ich meine. https://de.wikipedia.org/wiki/Schutzkontakt
Timo N. schrieb: > Warum soll das "nicht nötig" sein. Nur weil es in bestimmten > Betriebsmodi zufällig funktioniert, heißt nicht, dass es unbeschaltet > bleiben soll. Enable gehört an GND, damit der Treiber sicher AN bliebt. Auszug von Pololu: The default state of the ENBL pin is to enable the driver, so this pin can be left disconnected. Habe Enable mit GND verbunden. Kein Unterschied zu vorher aber ich lasse es mal so. Timo N. schrieb: > Hier wird im Diagramm aber 100µF empfohlen. Spielt aber für dein Problem > keine Rolle: Ja genau und unten drunter ist angegeben mindestens 47µF. So einen hatte ich durch Zufall noch hier.. Timo N. schrieb: > Hatte außer den beschrieben Problemen für meine Anwedung keine Probleme > mit den Gefälschten. Kommt aber auf die Anwendung an. Was passiert denn bei dir wenn du z.B. die Schrauben hinten am Schrittmotor oder die Welle mit etwas leitendem berührst? Mit SLEEP und RESET auf HIGH und den Step Pin an einer Signalquelle wie einem GPIO. Ich hoffe ja mal nichts für dich ;) Timo N. schrieb: > Wenn du den Schutzkontakt (PE) an der Steckdose anfässt(und festhältst) > und dann mit der anderen Hand die Schaltung berührst, dürfte eigentlich > nichts passieren. Ist das so? Achtung: Ich gehe davon aus, du weißt was > ich meine. Ja schon klar, nicht in die zwei Löcher in der Mitte greifen. Trotzdem Danke für den Tipp. Leider kein Unterschied. Der Motor zuckt trotzdem. Timo N. schrieb: > Ich glaube in deiner Umgebung ist eher > EMV-technisch was ganz krumm. Ich gehe morgen mal mit dem ganzen Zeug in den Keller oder auf den Dachboden da sind außer ein paar Lampen keine Geräte.
Patrick T. schrieb: > Auszug von Pololu: The default state of the ENBL pin is to enable the > driver, so this pin can be left disconnected. > Habe Enable mit GND verbunden. Kein Unterschied zu vorher aber ich lasse > es mal so. Enable hat im Chip anscheinend auch einen Pulldown. Besser ist es aber trotzdem den mit GND zu verbinden, da der mit 100k relativ hoch ist. Eine Fehlerquelle weniger. > Was passiert denn bei dir wenn du z.B. die Schrauben hinten am > Schrittmotor oder die Welle mit etwas leitendem berührst? Mit SLEEP und > RESET auf HIGH und den Step Pin an einer Signalquelle wie einem GPIO. > Ich hoffe ja mal nichts für dich ;) Nichts, ich hab den DRV8825 ja auf einer Platine und keine Breadboard-Schaltung. Außerdem verwende ich den Arduino und nicht den Raspi. Trotzdem sollte es daran nicht liegen. > Leider kein Unterschied. Der Motor zuckt trotzdem. Hm... Vlt mal Schaltung fotografieren und hier reinstellen. > Ich gehe morgen mal mit dem ganzen Zeug in den Keller oder auf den > Dachboden da sind außer ein paar Lampen keine Geräte. Versuch auch mal einen 10k - 100k Widerstand als externen Pulldown vom STEP Signal nach GND. Eventuell hilft das.
Patrick T. schrieb: > Habe mal alle Jumperkabel entfernt und alles neu aufgebaut. Als Kabel > nutze ich jetzt Litzen aus einem Cat7 Kabel, aber ohne die Schirmung > etc. Daß viele der billigen Jumperkabel Mist sind, ist ja bekannt. Aber ob Litzen aus einem Cat7 Kabel für deine Anwendung besser sind, das stelle ich mal in Frage. Die sind normalerweise AWG27 = 0,1qmm, und wenn du Pech hast auch nur aus verkupfertem Aluminium. D.h. für Versorgung und GND Verbindungen nicht geeignet. Wenn du nichts Besseres hast, dann nimm wenigstens mehrere davon parallel.
Angehängte Dateien:
-

DRV.jpg
230 KB
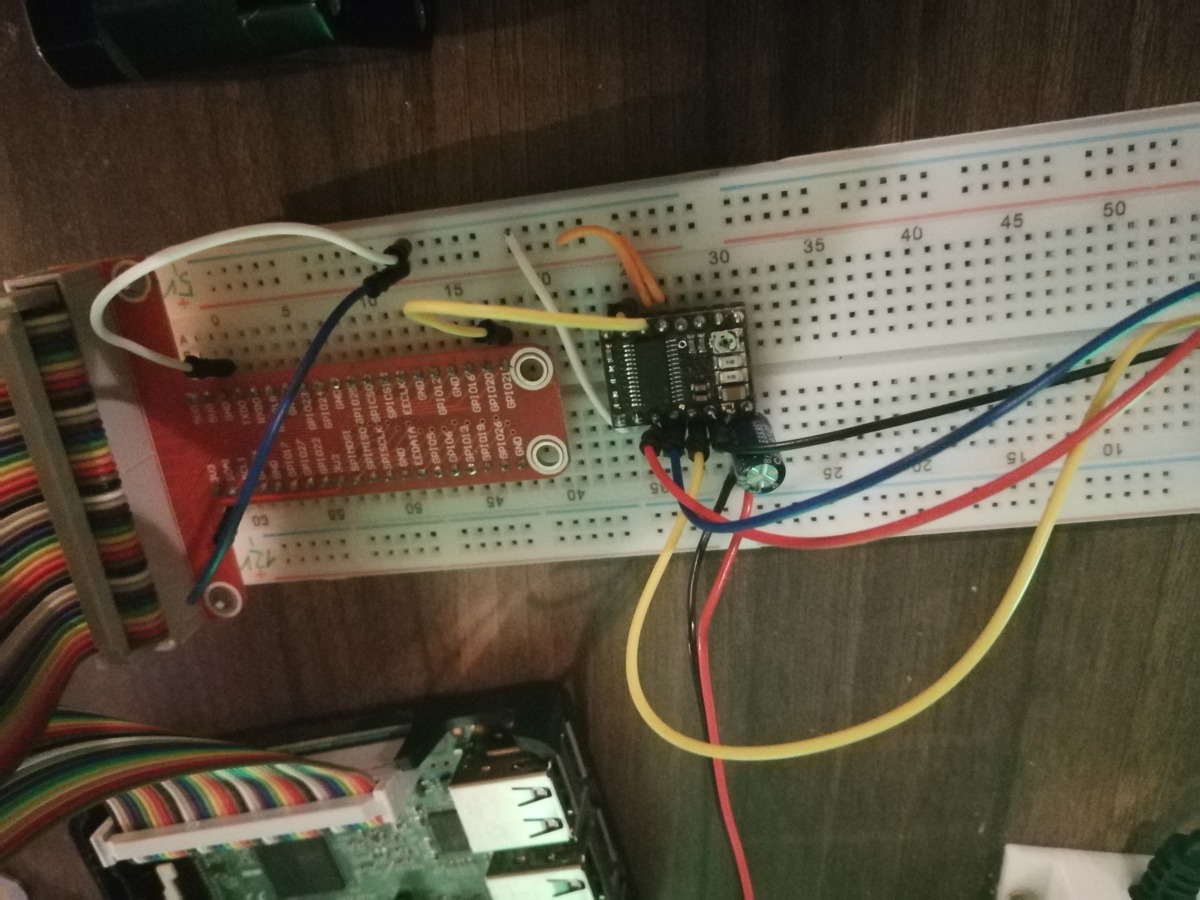
Hallo, sorry das so lange nix kam, hatte nicht wirklich Zeit weiter zu machen. Mittlerweile kam der Original Pololu DRV8825 an den @Timo N. (tnn85) verlinkt hatte. Anscheinend lag es an den Nachbau Treibern. Ich habe wie im Bild zu sehen alles so verkabelt wie ich es am Anfang hatte, also mit Jumperkabel auf dem Breadboard. Hätte das nicht funktioniert wäre mein nächster Schritt die dickeren Kabel gewesen. Wollte es aber einfach nochmal testen. Mit den nachgebauten Chips habe ich wie gehabt das beschriebene Problem. Mit dem Original Treiber funktioniert alles wie es soll. Kann also egal mit was den Motor berühren und er macht auch keine Schritte. Ich habe noch zwei weitere Nachbau Treiber die machen das selbe Problem. Das Ergebnis ist also, zumindest bei mir, reproduzierbar. Ob dies bei allen Nachbauten der Fall ist wage ich mal zu bezweifeln, da ja ansonsten niemand über dieses Problem berichtet hat. Ich werde auf jeden Fall bei dem Original bleiben. Das hätte mir von Anfang an sehr viel Ärger erspart. Vielen Dank an alle die mir hier Tipps gegeben haben und mit diskutiert haben. Ein paar Sachen werde ich für meinen finalen Aufbau auch so übernehmen sobald ich das ganze auf eine Platine löte.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.